|
4542| 7
|
激光切割+编程 时针 |
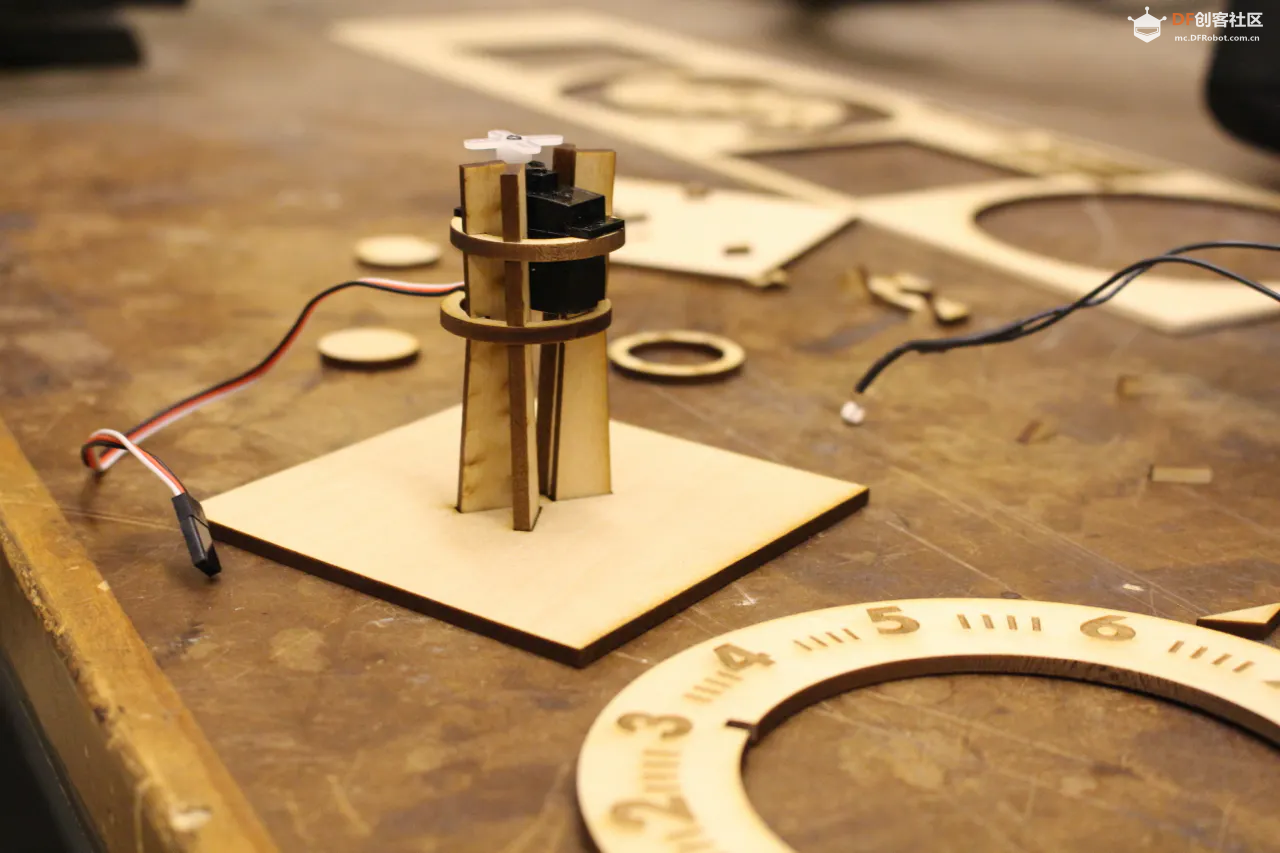
一个会转动的时钟,上面会坐一个小人,旁边摆个小桌子。每过一段时间,小人就会转走来提醒程序员该休息了。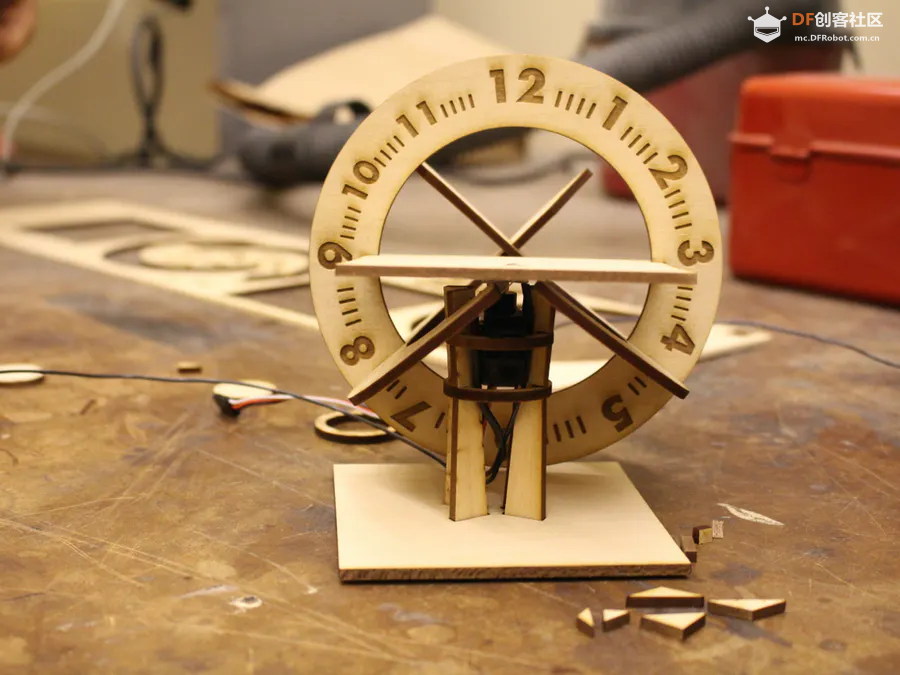 Clockwork Spring 2015 Alex Greenspan Greta Gardner Andy Mah
 原文:https://www.hackster.io/alexsg/clockwork-82a828 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed





 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶








