这次改进了舵机支撑改用了舵机连接件,并且增加了一个舵机控制上下动作。
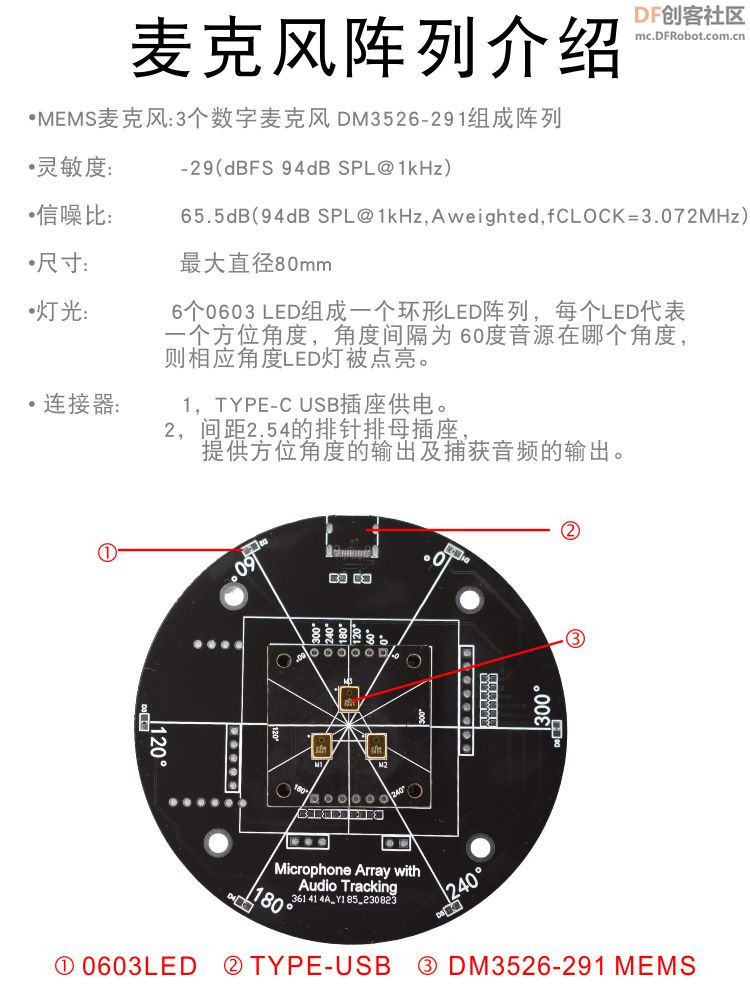
这套麦克风声源定位板上已经把360度角度平均分成6个方向,并且把每个方向的高电平引脚接出,所以我们只需要利用Arduino载人舵机控制库文件,因为舵机只能0-180度方向,所以我们只能接入4个方向,分别是0度,60度,120度,和180度。剩下的240度和300度两个我接到第二个舵机上面来控制上下动作。
因为声控板是硬件集成所以我们并不要对其做额外设置,非常适合初学者和diy爱好者。
目前还在对这个板子做进一步的发掘,希望能做出一台类似宠物一样随叫随到的智能能小车。感兴趣的可以和我一起探讨交流。
|
|
|
|
|
|
|
|
|
|



 沪公网安备31011502402448
沪公网安备31011502402448
 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶






