行空板我很早就买了,但是没有怎么玩过,这次参加试用活动,都尝试了一下,然后结合试用的扩展板制作了个小车,因为我一直打算做一个可以全屋巡逻的小车这次刚好合适。
一、功能特性
- 远程控制:通过物联网平台可以下发指令,轻松控制小车的前后左右移动,实现灵活的远程操控。
- 灯光控制:能够控制扩展板上的 ws2812 灯的开关状态,为小车增添独特的视觉效果。
- 视频实时显示:可以获取行空板视频,并在物联网平台上实时显示,让你随时了解小车周围的情况。
二、系统框架图
整个系统主要由以下几个部分组成:
- 物联网平台:作为指令的发送和接收中心,以及视频显示的平台。
- 行空板及扩展板:负责接收物联网平台的指令,并控制小车的移动和灯光,同时采集视频信号。
- 小车硬件:包括电机、轮子等,执行行空板的控制指令实现移动。
- 通信模块:采用 MQTT 连接方式,确保指令的稳定传输和实时响应。
三、硬件资源

- 行空板:提供强大的计算和控制能力,支持 Python 编程。
- 扩展板:集成了 ws2812 灯等硬件资源,方便进行灯光控制。
- 小车底盘:包括电机、轮子、车架等,为小车的移动提供基础。
- 摄像头:用于采集行空板视频,实现实时显示功能。
四、制作过程
- 硬件组装:将行空板和扩展板安装在小车底盘上,连接好电机、摄像头等硬件设备。
- 软件编程:使用 mind + 平台,采用 Python 语言进行编程。通过 MQTT 连接实现与物联网平台的通信,编写控制小车移动、灯光开关以及视频采集和传输的代码。
- 调试优化:对小车进行反复调试,确保各项功能正常稳定运行。优化代码,提高性能和响应速度。
五、软件资源
- Python 编程语言:具有简洁、高效的特点,方便进行物联网小车的编程开发。
- mind + 平台:提供了丰富的编程工具和资源,支持硬件连接和代码编写。
- MQTT 库:用于实现与物联网平台的通信,确保指令的可靠传输。
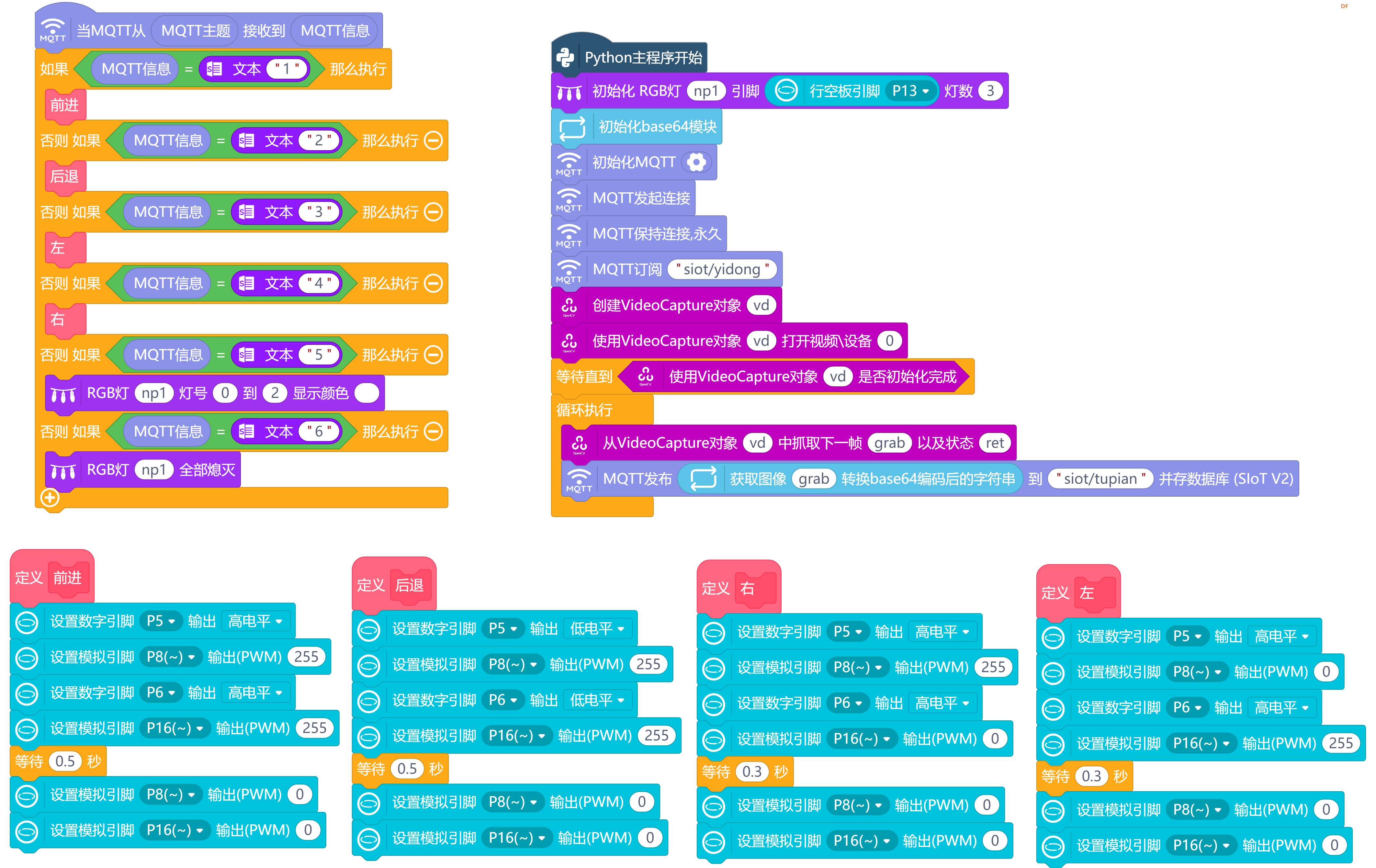
六、代码功能演示
以下是代码的主要功能演示:
 视频 视频
|
|
|
|
|
|
|
|
|
|



 沪公网安备31011502402448
沪公网安备31011502402448

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员






