|
17604| 4
|
[M10项目] 信息科技实验(苏教版)——模拟倒车雷达工作过程 |

|
本帖最后由 hnyzcj 于 2024-12-2 11:10 编辑 教材再现: 信息科技教材八上(苏教版)物联网传感技术一节中“传感器的选择和应用”安排了“模拟倒车雷达的工作过程”的实验。该实验内容主要介绍了在物联系统中,如何根据需求和传感器特点来选择合适的传感器,重点学习超声波传感器,了解超声波传感器的测距原理,使用超声波传感器模拟倒车雷达工作过程。 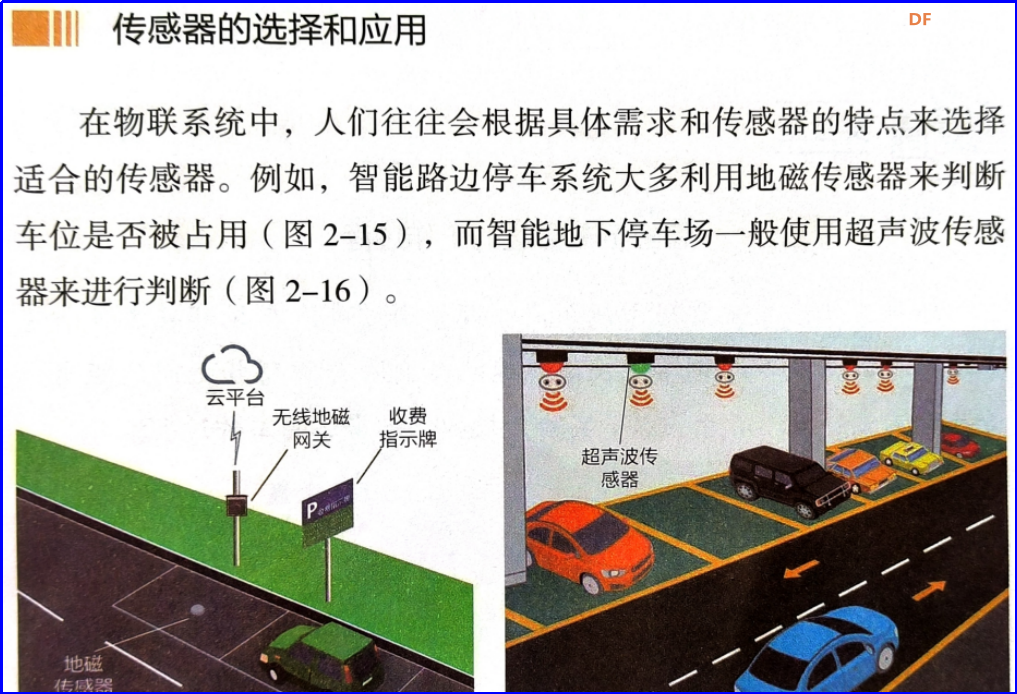  实验设计: 教材中“实验室”栏目中只给出了“模拟倒车雷达工作过程”实验。我们根据教材内容增加了“智能停车场”实验。经分析两者关系如下:智能停车场是通过设定距离阈值来判断车位有无停车的简单逻辑;“模拟倒车雷达”则是通过分区段间阈值来提醒用户距离车位的距离的复杂逻辑。综上所述实验设计如下: 实验1:制作测距仪,解决实际问题(测桌高,测身高)。 实验2:模拟智能停车场实验。 实验3:模拟倒车雷达工作过程实验。实验效果:    教学建议: 本课教学内容分三个层次任务,教师课根据自己实际情况选用。 任务一:使用行空实验盒配套传感器完成超声波传感器测距,并将测量结果显示在屏幕上。并使用该测量工具尝试测量课桌高度和同学身高的测量方案。 任务二:使用行空实验盒+外接超声波传感器完成课本(P31)模拟智能地下停车场实验。(选做) 任务三:使用行空实验盒配套传感器完成模拟简易倒车雷达工作过程(必做),添加摄像头调用Opcv库模拟汽车倒车影像(选做)。 知识储备: (1)超声波:超声波是声波的一部分,是人耳听不见、频率高于20KHZ的声波,它和声波有共同之处:都是由物质振动而产生的,并且只能在介质中传播。在自然界中,蝙蝠是利用超声波的能手,它通过发射和接收超声波在黑暗中飞行并捕捉食物。 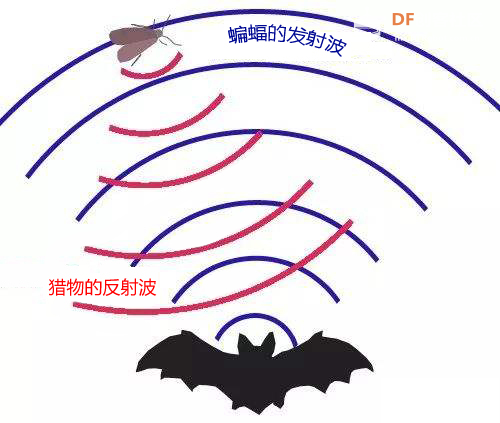 (2)超声波测距原理:由于超声波指向性强,能量消耗缓慢,在介质中传播的距离较远,因而超声波经常用于距离的测量。超声波发射器向某一方向发射超声波,在发射的同时开始计时,超声波在空气中传播,途中碰到障碍物就立即返回;超声波接收器收到反射波就立即停止计时。超声波在空气中的传播速度为340m/s,根据计时器记录的时间t,就可以计算出发射点距障碍物的距离(s),即:s=340×t/2 。这就是所谓的时间差测距法。 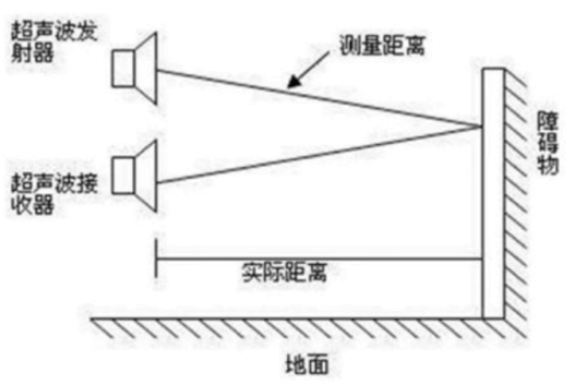 超声波测距主要应用于倒车提醒、建筑工地、工业现场等的距离测量,虽然目前的测距量程上能达到百米,但测量的精度往往只能达到厘米数量级。 (3)超声波传感器:我们使用的超声波传感器是HC-SR04,其性能比较稳定,盲区为2cm,是HC-SR04超声波传感器。 在使用HC-SR04超声波传感器时,应先将其插在电路板上后再通电,避免产生高电平的误操作。针脚定义,如表所示。 实验一:制作测距仪解决实际问题 实验目的: (1)认识超声波、超声波传感器,学习超声波传感器测距原理。 (2)利用传感器制作简易测距仪。 (3)能够根据实际设计超声波测距方案。 需求分析: (1)利用超声波传感器制作简单测距仪,并将测距结果屏幕显示 (2)能够根据实际情况,设计合理的测距方案。 技术分析: 利用超声波检测出与目标物体的距离,并实时在行空板屏幕显示。 实验器材: (1)行空板M10实验盒 (2)超声波传感器HC-SR04 (3)Mind+编程软件 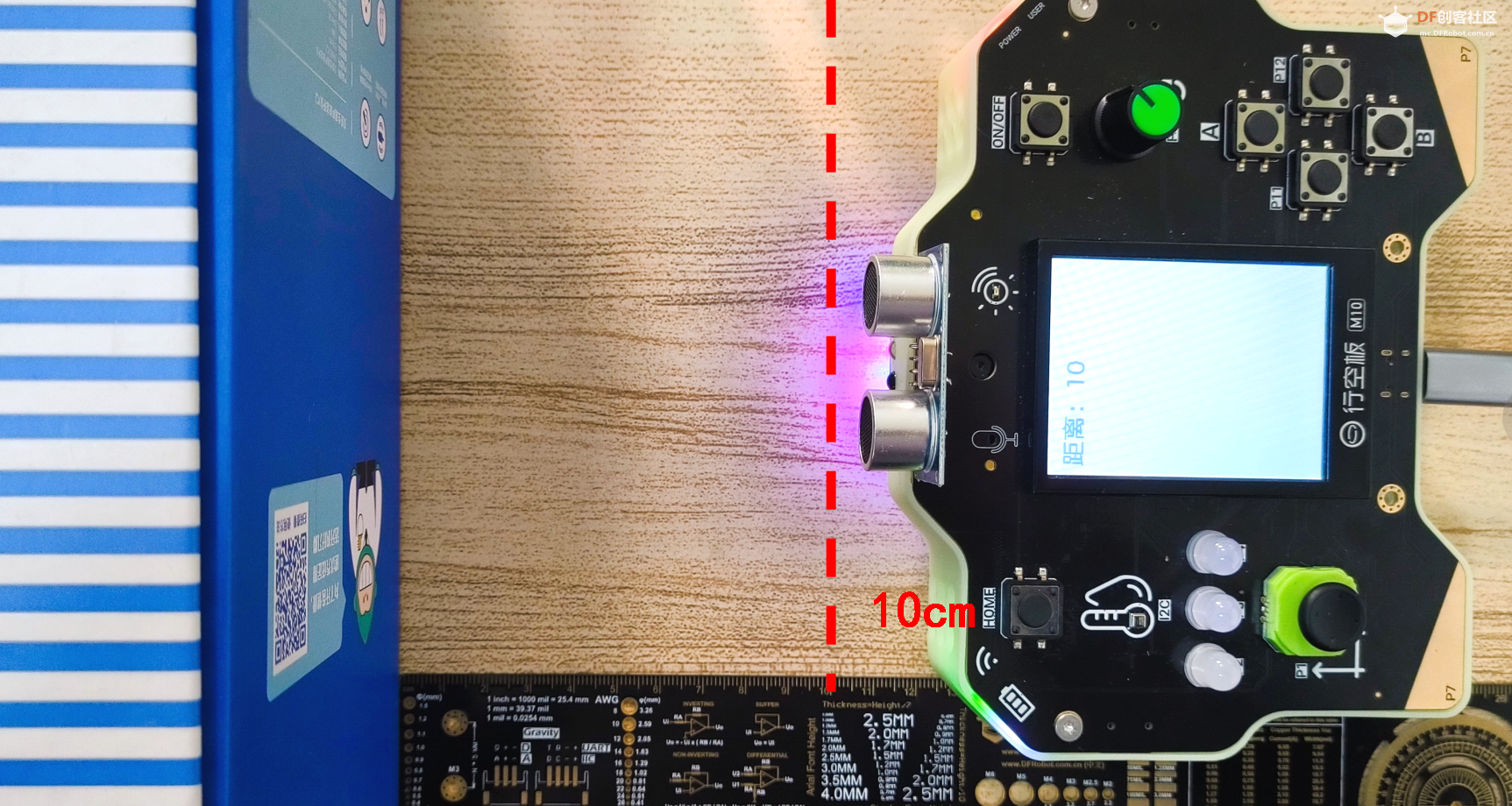 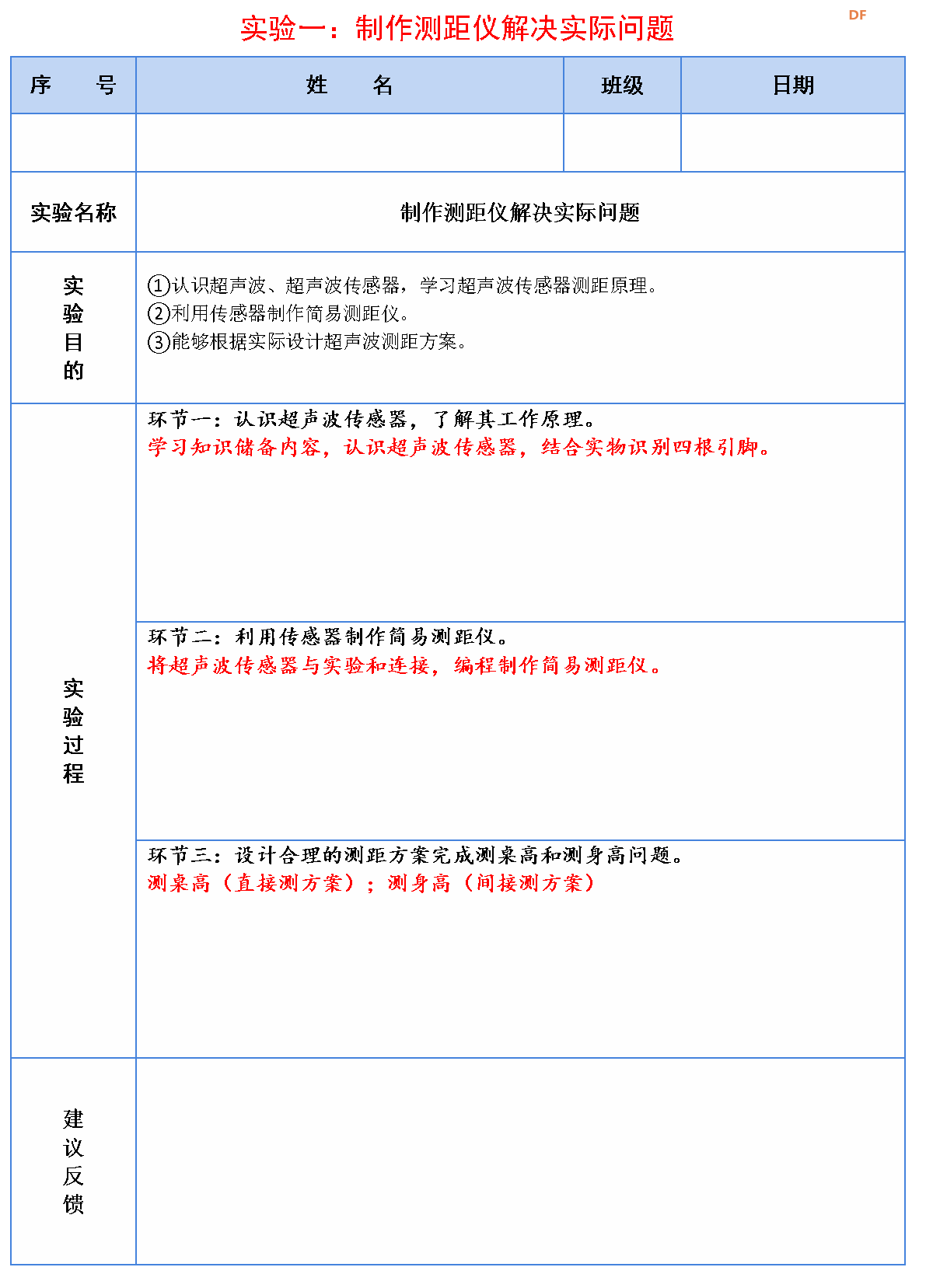 实验一操作步骤 Step01:认识超声波传感器HC-SR04,观察超声波传感器,识别四根引脚(vcc、gnd、trig、echo)。 其中vcc电源正极,gnd电源负极,trig输入端(超声波发射端),echo(超声波接收端),工作时超声波发射器(trig)向某一方向发射超声波,在发射的同时开始计时,超声波在空气中传播,途中碰到障碍物就立即返回;超声波接收器(echo)收到反射波就立即停止计时,再根据公式s=340×t/2计算出距离。具体过程如下图所示。 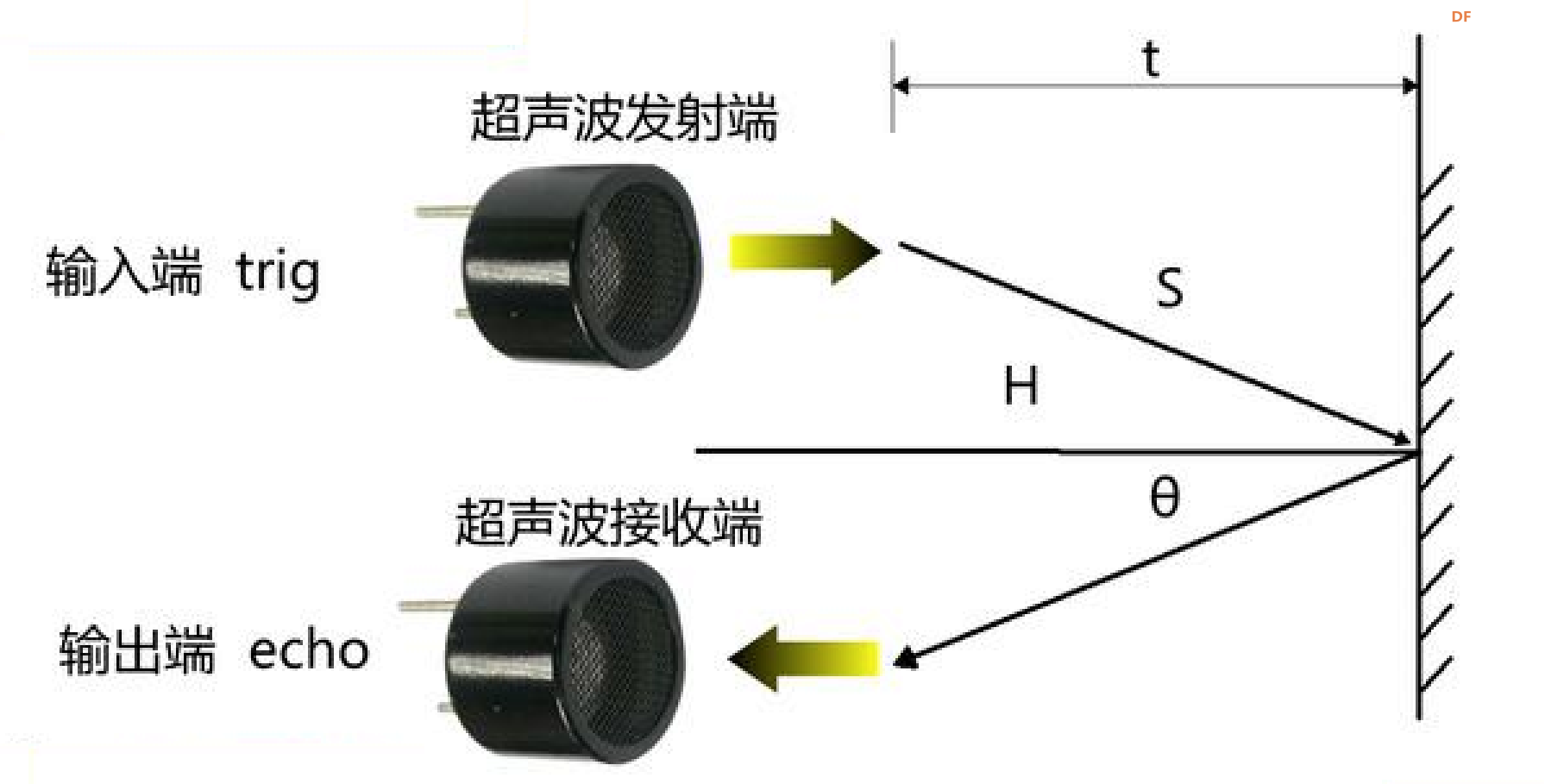 Step02:连接电路:将超声波传感器插入实验箱上方前端的超声波接口连接如下图所示。 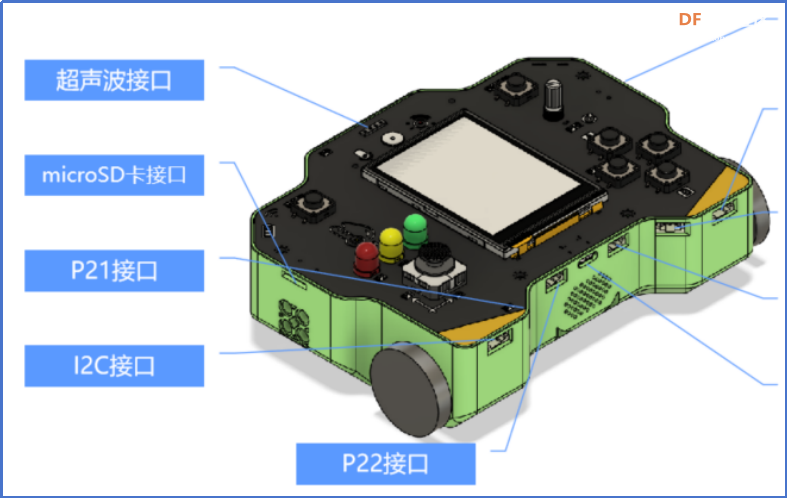  Step03:编写程序读取测距值。 (1)环境部署:打开mind+软件,在“官方库”选项卡中添加“行空板”,在“用户库”中添加“行空板信息科技实验盒”。具体操作:点击扩展,切换到用户库选项卡在“用户库”的搜索栏中,选择实验盒用户库。输入用户库链接,选择实验盒用户库(链接:https://gitee.com/zhaoruiz/ext-unihiker-box)。入下图所示。  (2)编写程序:在用户库中找到ZRZ:行空板信息科技实验盒其高配功能指令拖拽指令“读取超声波距离指令”入下图所示。 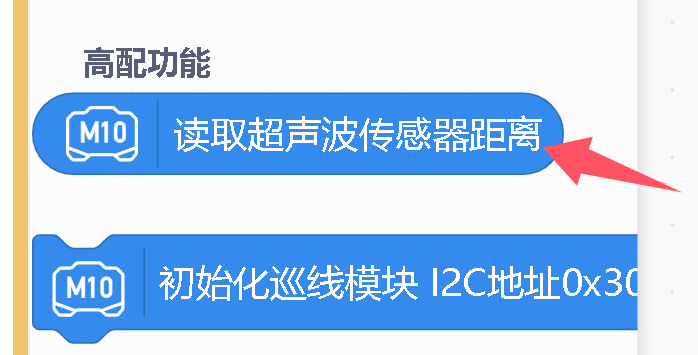 编写程序完成测距屏幕显示功能,完整程序如下图所示。 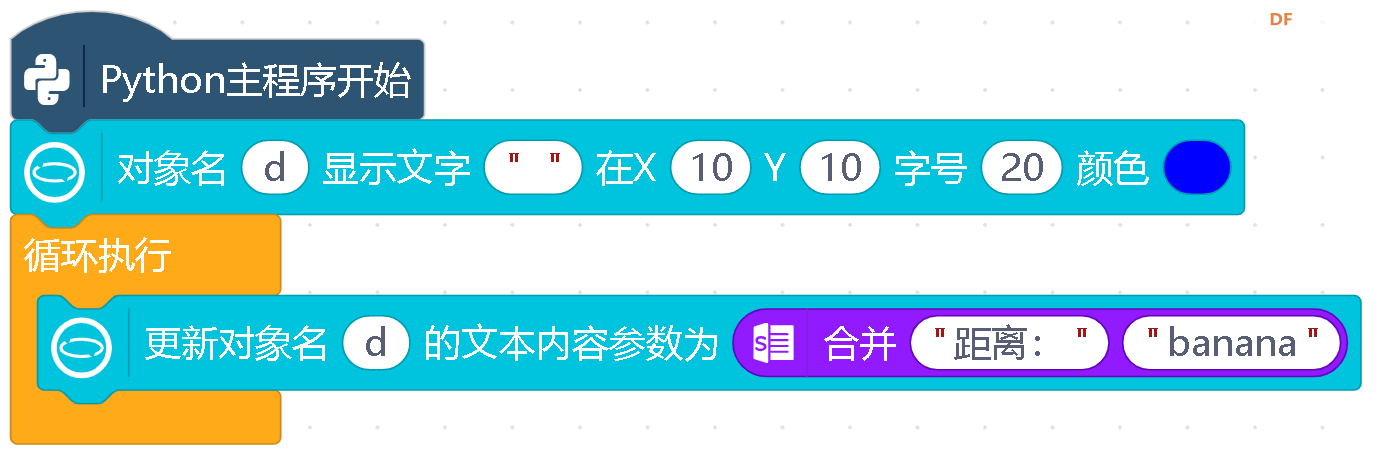 (3)记录数据:对于不同目标物体进行测距测试,并记录相关数据。 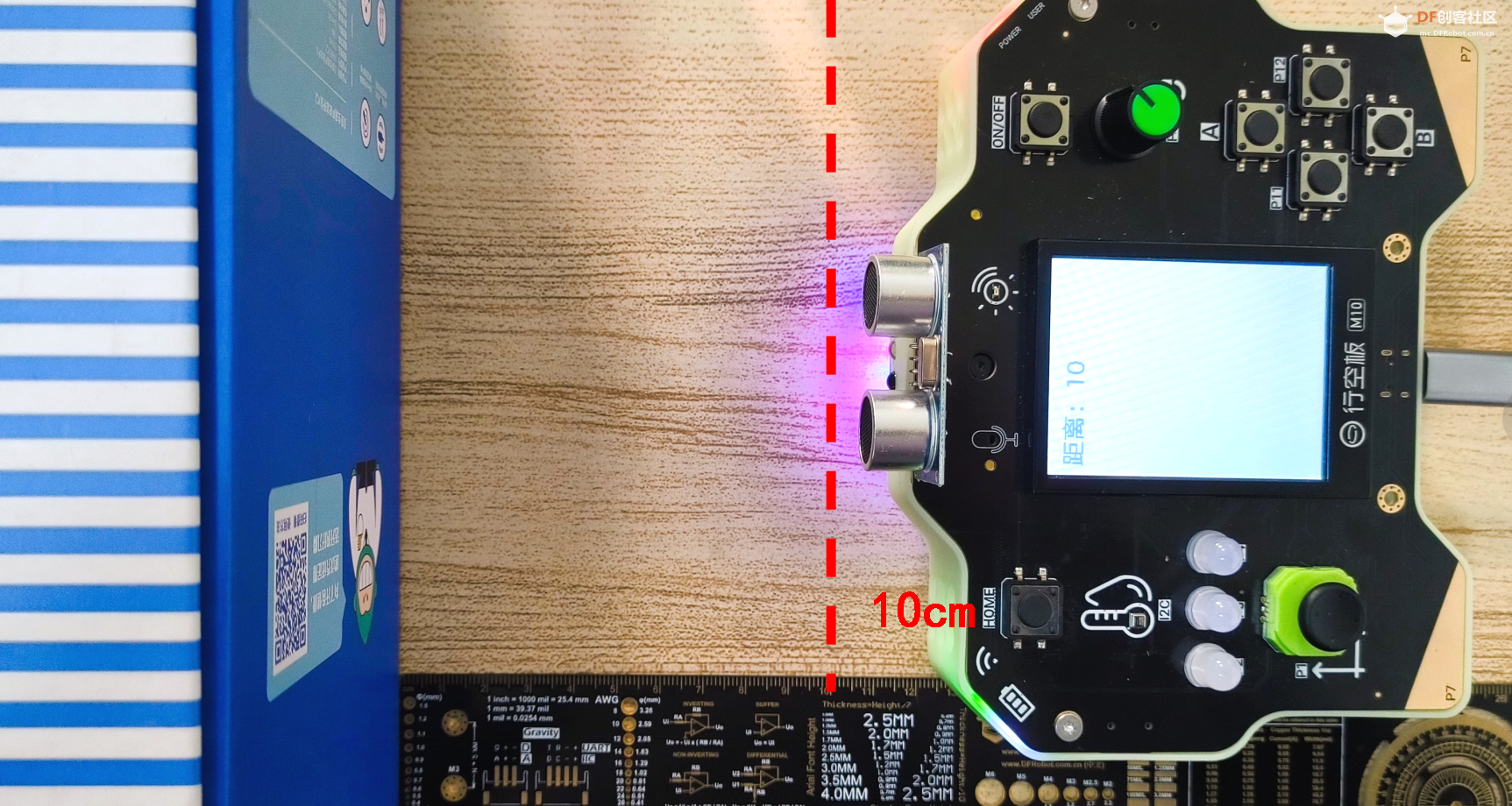 探究:用手指分别堵在超声波传感器的两个孔位记录测量结果,得出相关结论。  (4)小组探究设计测量桌高和身高的方案,并分析这样设计的原因。 测量桌高方案:直接测量(桌高小于100cm);测量身高方案:转换测量(身高大于100cm) 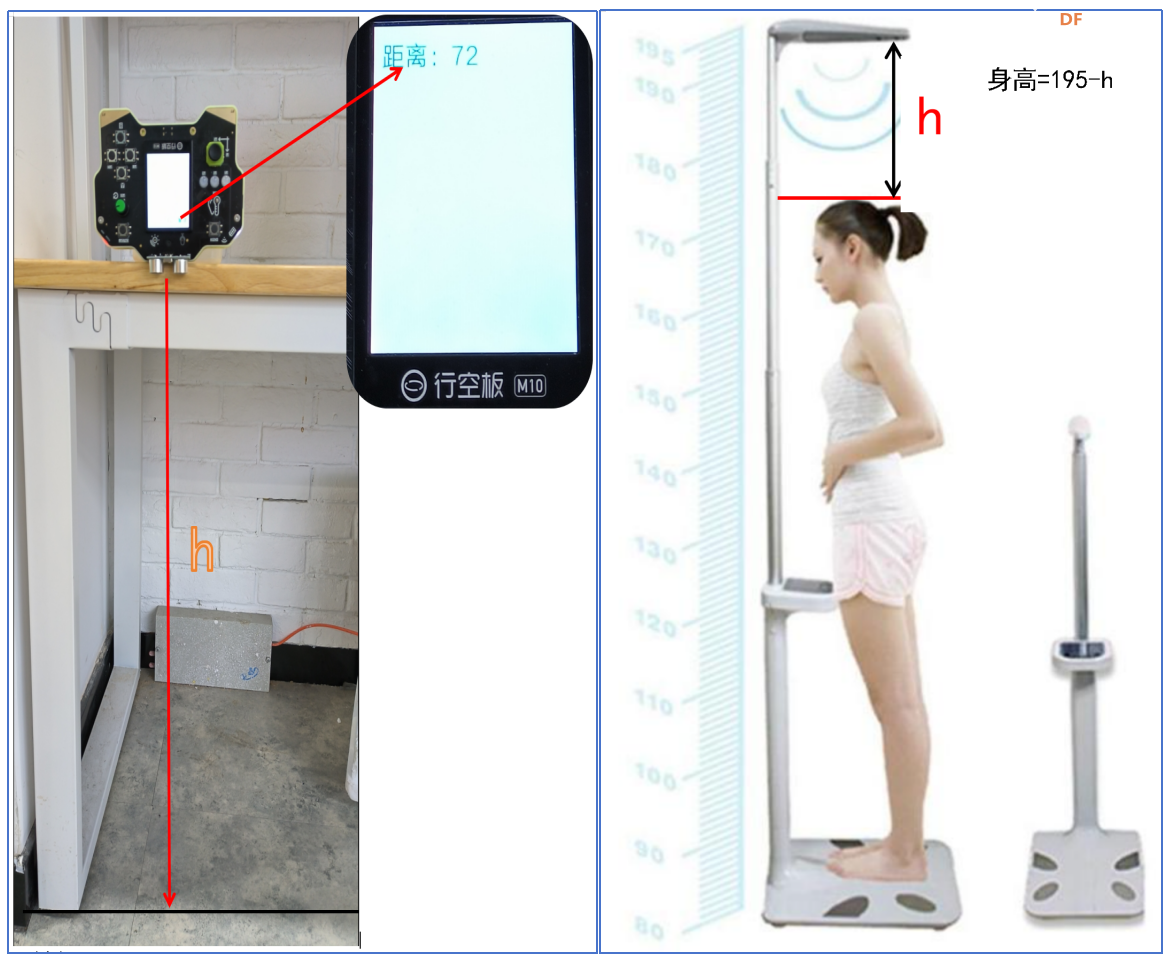 信息科技实验(苏教版)——模拟倒车雷达工作过程 信息科技实验(苏教版)——模拟公交卡充值扣费过程 信息科技实验(苏教版)——体验智能开发板连接Wi-Fi 信息科技实验(苏教版)——探究蓝牙的数据传输距离 |

474.98 KB, 下载次数: 0
|
本帖最后由 hnyzcj 于 2024-12-2 11:10 编辑 实验二:智能停车场 实验目的: (1)超声波传感器检测设定距离阈值内有无车辆进入车位。 (2)车辆进入车位后,车位指示灯亮起,屏幕显示停车位场景。 需求分析: (1)功能需求:超声波传感器能检测车辆是否进入车位,并对应亮起车位指示灯。 (2)界面需求:提供一个可显示停车场内,实时更新的车位空满示意图。 技术分析: (1)超声波传感器检测固定距离内是否存在车辆并点亮对应车位指示灯。 (2)根据车位是否使用情况,屏幕实时更新停车场内示意图。 实验器材: (1)行空板M10实验盒 (2)URM09-模拟量超声波传感器 (3)Mind+编程软件  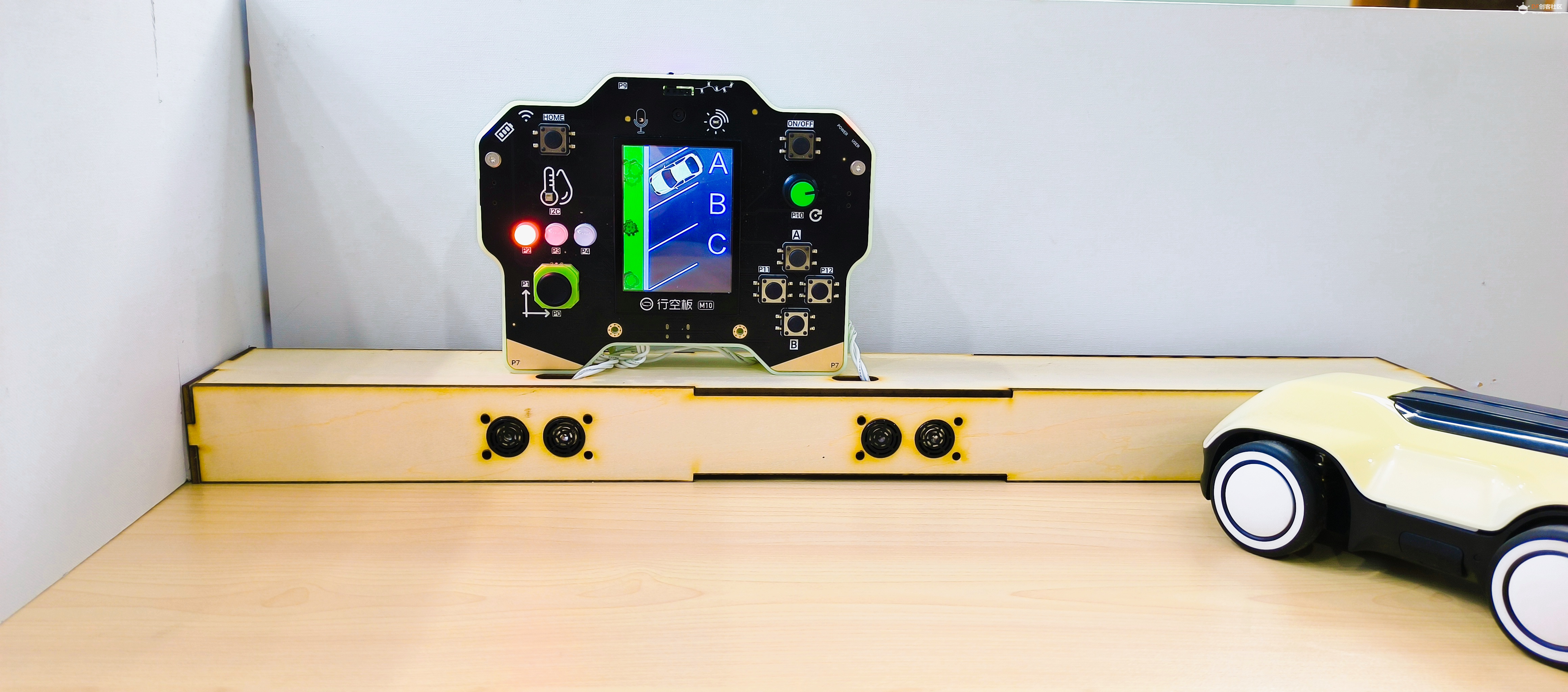   实验二操作步骤 Step01:认识超声波传感器URM09,观察超声波传感器,识别三根引脚(A,+,-)其中A是信号口,+电源正极,-电源负极。 Step02:连接电路:将超声波传感器插入实验箱P21、P22(如下图①②)接口,具体连线如下图所示。 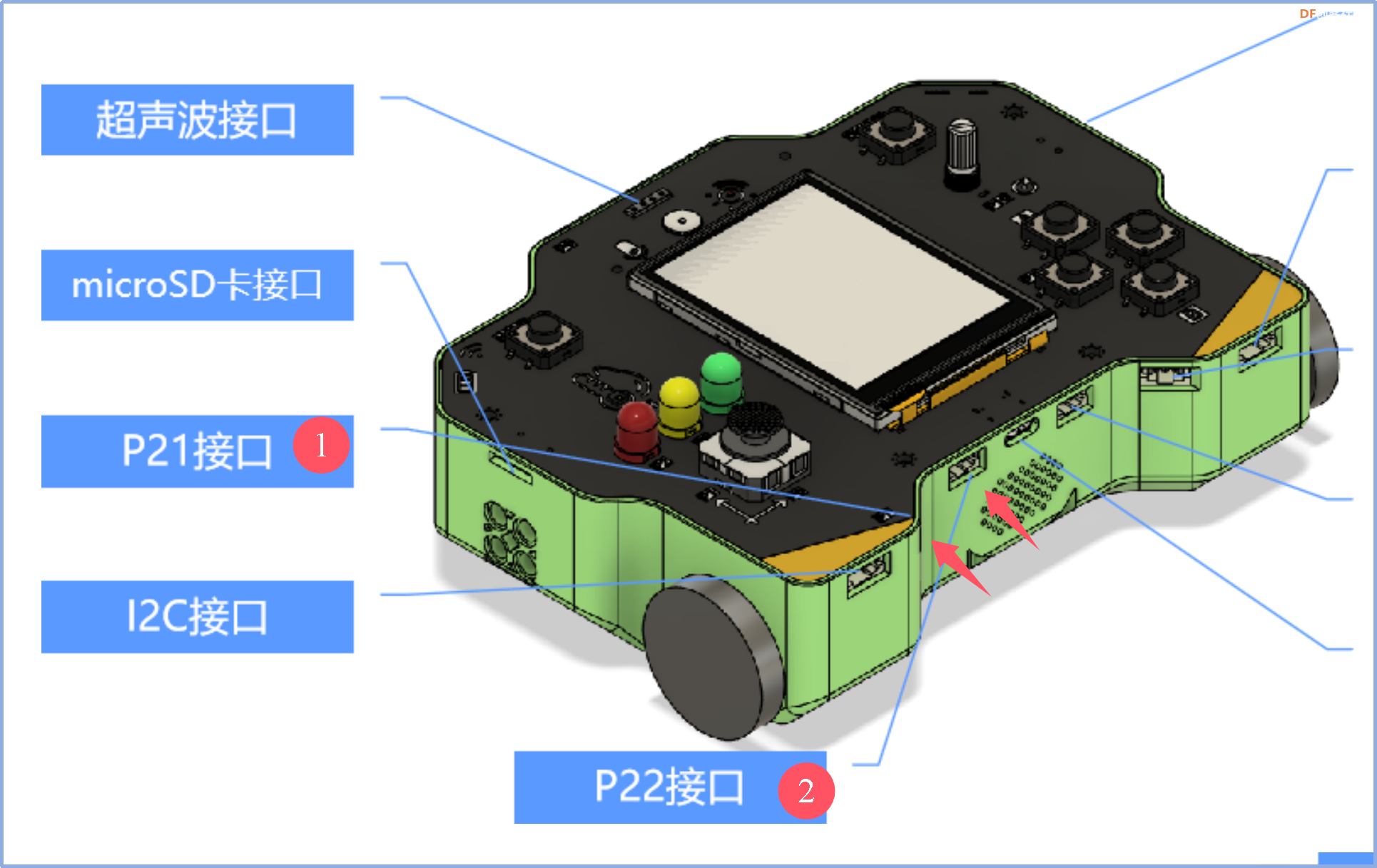 Step03:编写程序读取测距值。 (1)环境部署:打开mind+软件,在“官方库”选项卡中添加“行空板”,在“pinpong”库中添加“模拟超声波测距传感器”。具体操作:点击扩展,切换到“pinpong”库选项卡,选择“模拟超声波测距传感器”库。如下图所示。  (2)车位逻辑表:依据三个车位是否停放车辆,填写车位逻辑表如下(红—A;黄—B;绿—C)  (3)编写程序:超声波传感器指令如下 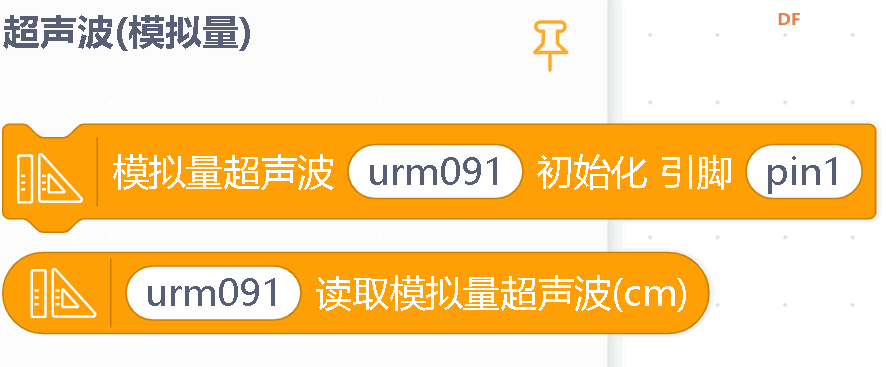 分别初始化两个超声波传感器如下所示  依据上述逻辑表编写程序逻辑如下 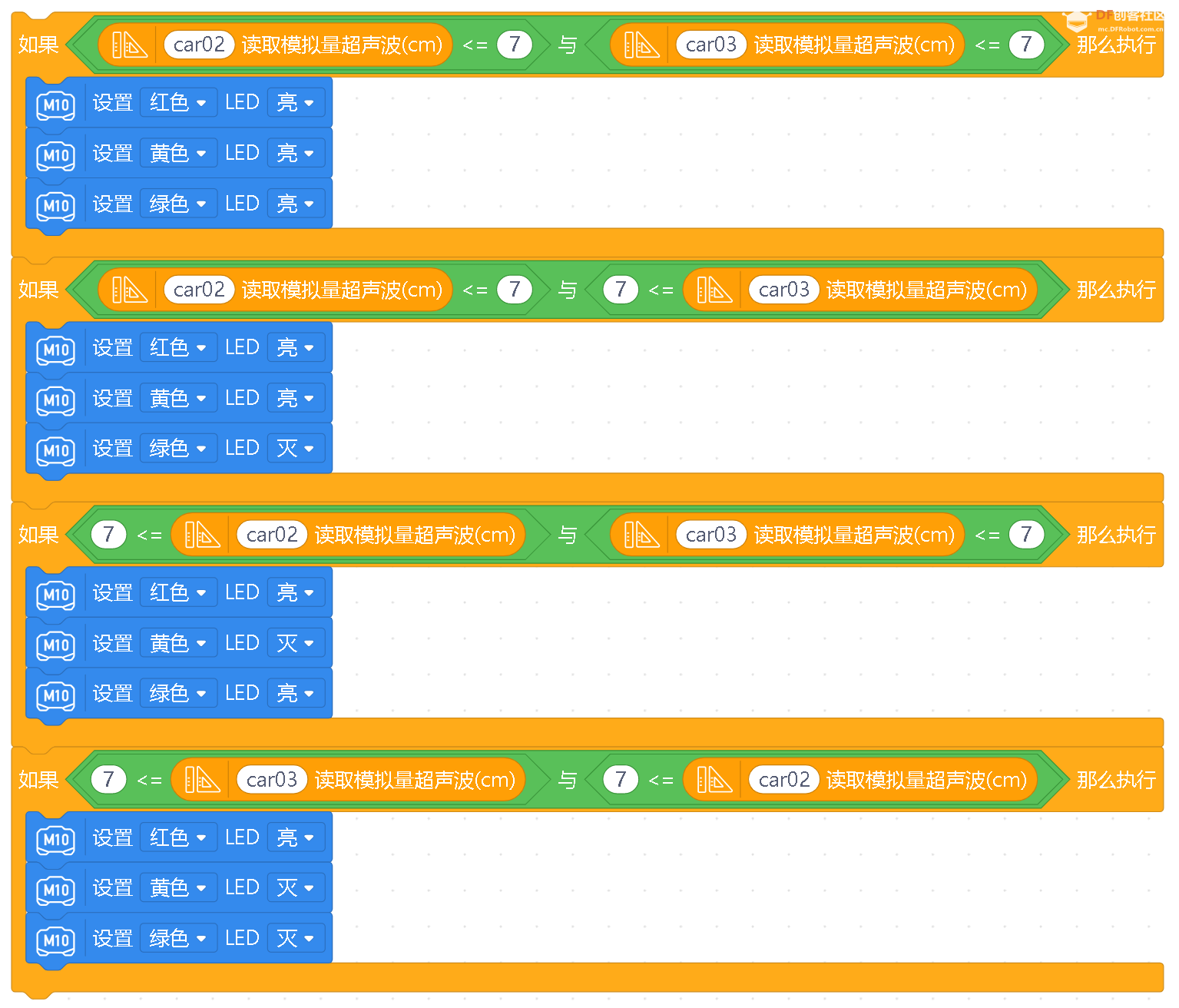 Step04设计车位示意图,并完成屏幕显示。 (1)根据功能需求设计四种情况下的车位示意图。 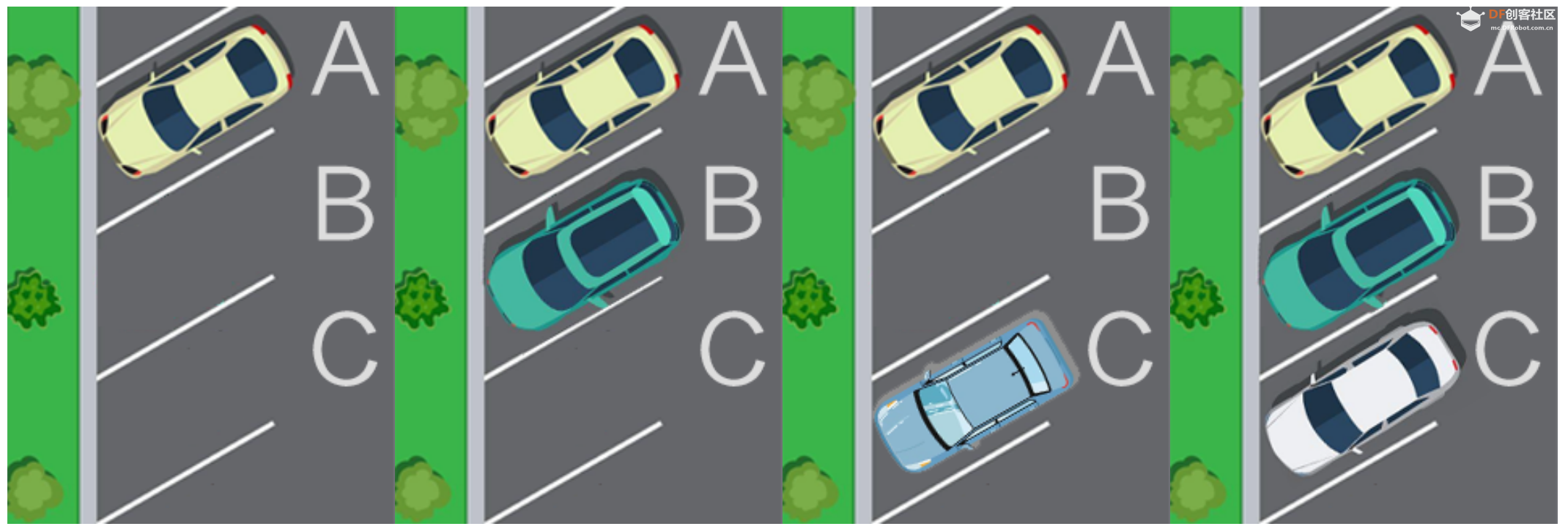 (2)添加图片到文件系统中,拖过拖拽方式将四个车位文件拖拽到文件系统中,如下图所示。 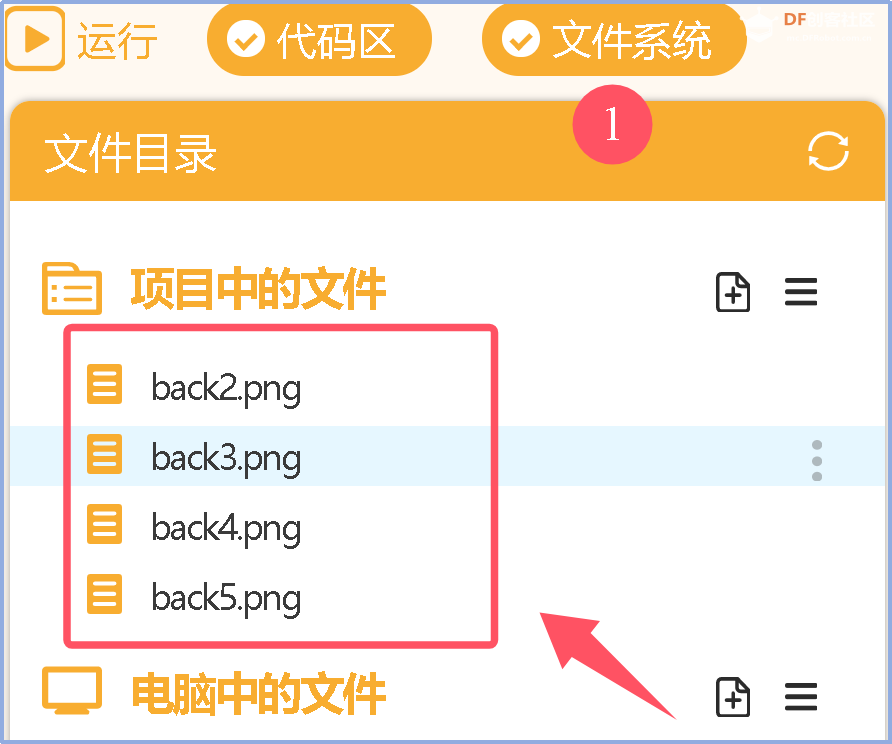 (3)程序中添加显示图片及更新图片指令,完整程序如下图所示。 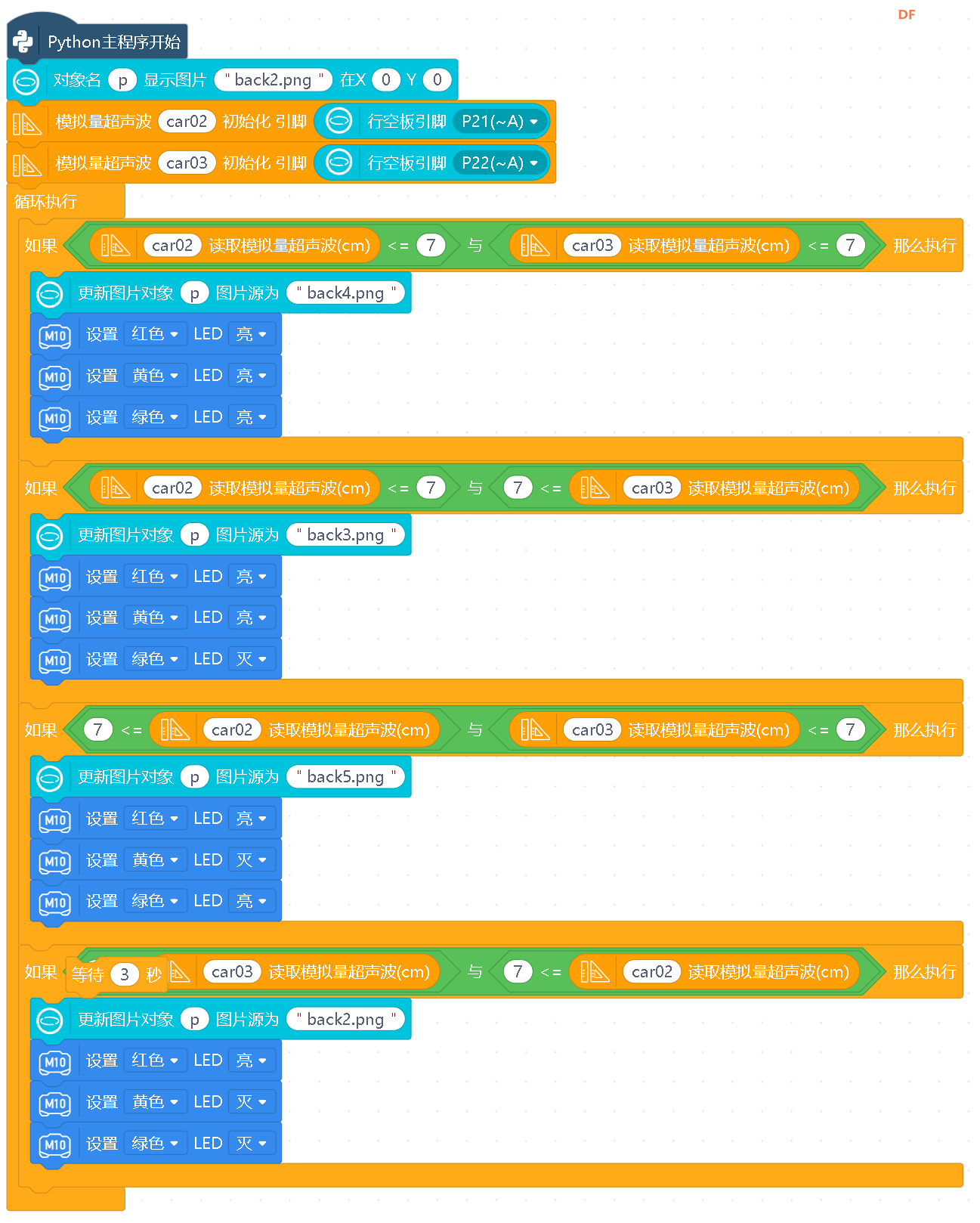 信息科技实验(苏教版)——模拟公交卡充值扣费过程 信息科技实验(苏教版)——体验智能开发板连接Wi-Fi 信息科技实验(苏教版)——探究蓝牙的数据传输距离 |
700.66 KB, 下载次数: 2
售价: 5 创造力 [记录]
|
本帖最后由 hnyzcj 于 2024-12-2 11:10 编辑 实验三:模拟倒车雷达 实验目的: (1)通过超声波传感器模拟倒车雷达的工作过程。 (2)借助opencv库驱动摄像头模拟汽车倒车影像。 需求分析: (1)功能需求:能够实时提供车体与车库端的距离数据;能够实时观测车体与车库的影像数据。 (2)界面需求:制作一个可显示测距数据及倒车影像的屏幕,便于读取相关数据辅助倒车。 技术分析: (1)检测车体与障碍物之间的距离数据,行空板屏幕显示。 (2)摄像头采集的图像实时传输到行空板屏幕显示。 实验器材: (1)行空板M10实验箱 (2)超声波传感器HC-SR04 (3)逻辑摄像头 (4)Mind+编程软件及铜柱及辅助结构件    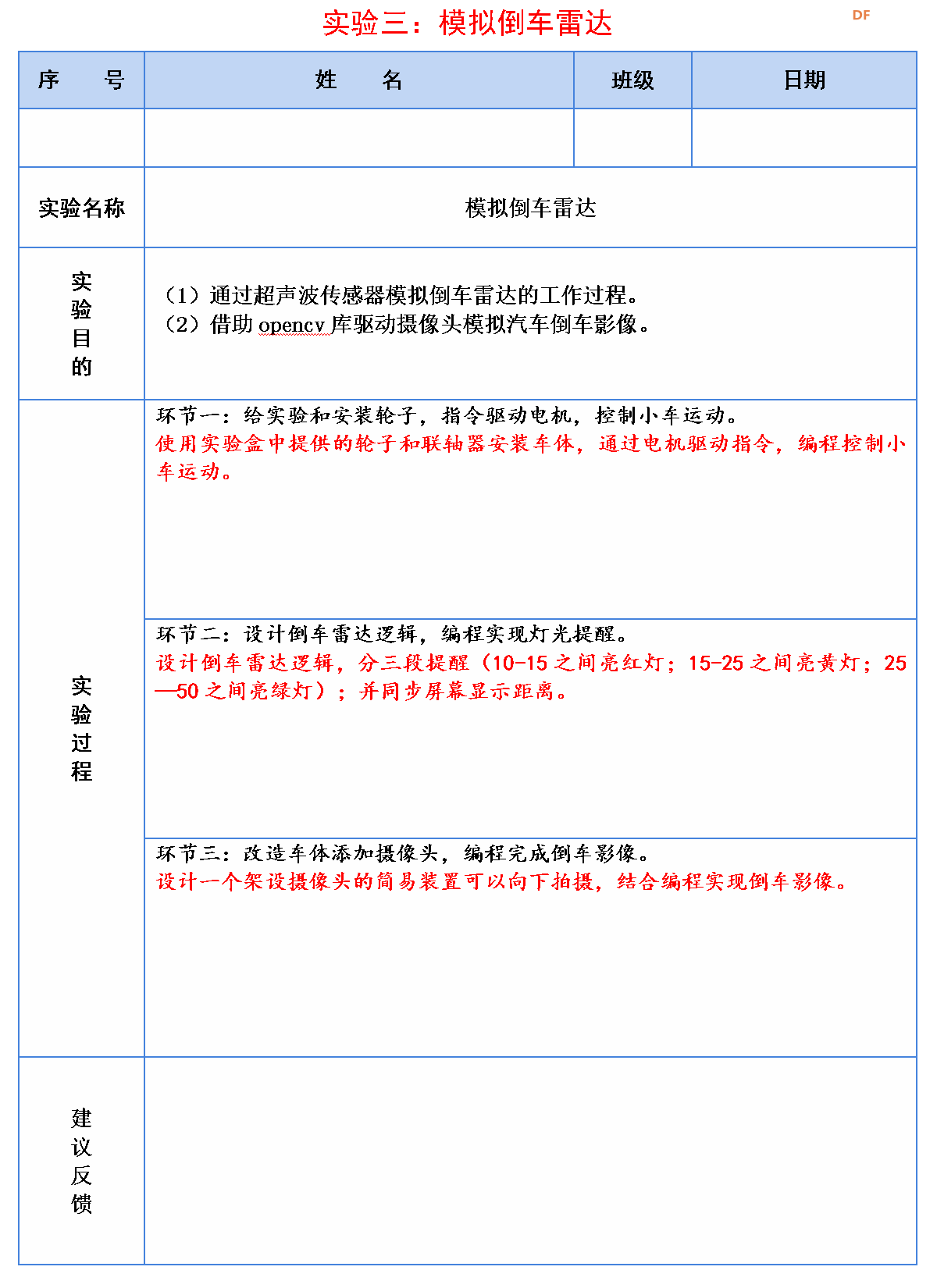   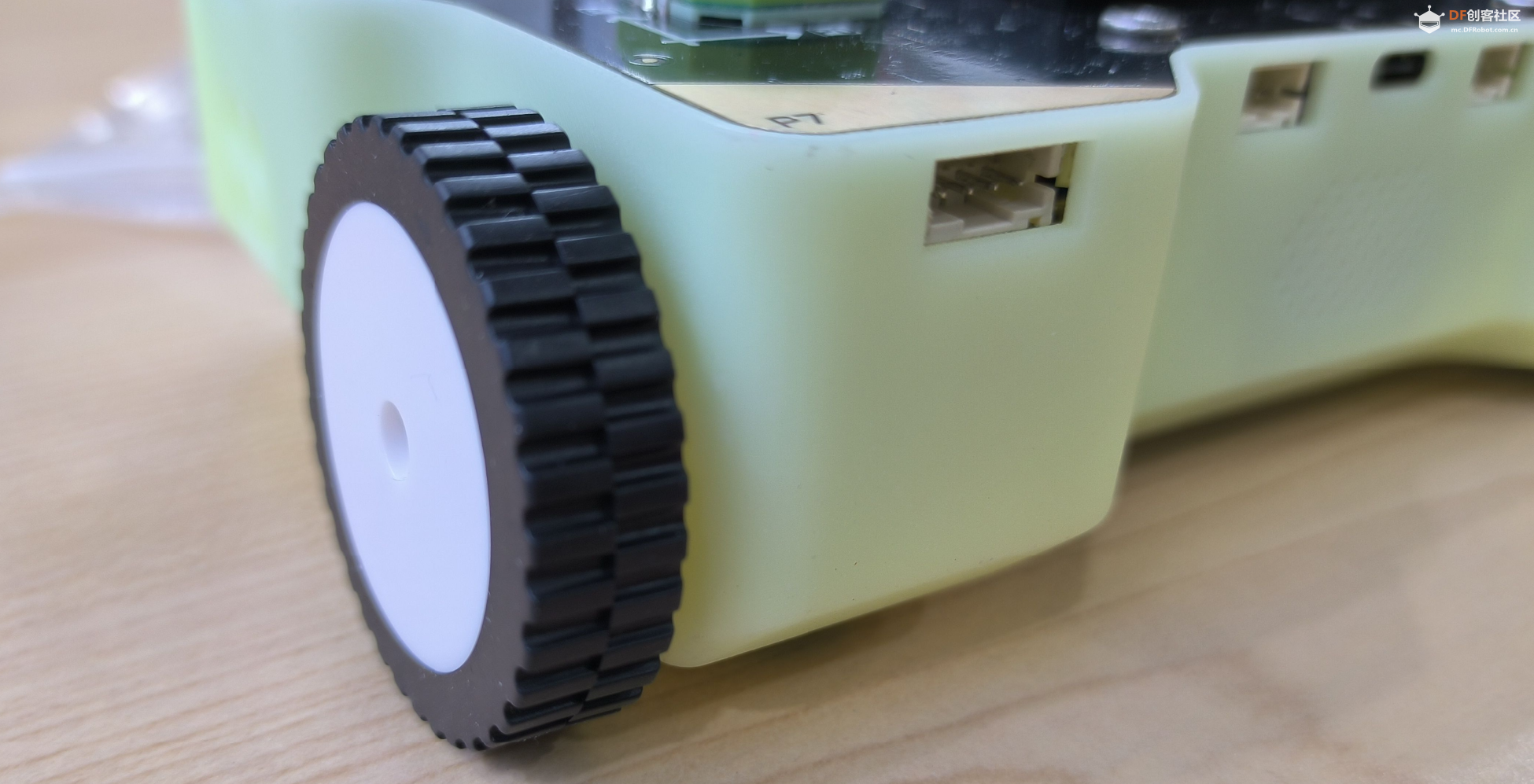 Step02:编写程序驱动车体,在用户库中添加“信息科技实验盒”库,这里不再赘述,从“高配”指令中添加电机驱动指令,如图所示。  逻辑关系表:设L为车位与倒车雷达之间的距离,示例逻辑如下表,实验室也可根据自己情况重新设定。 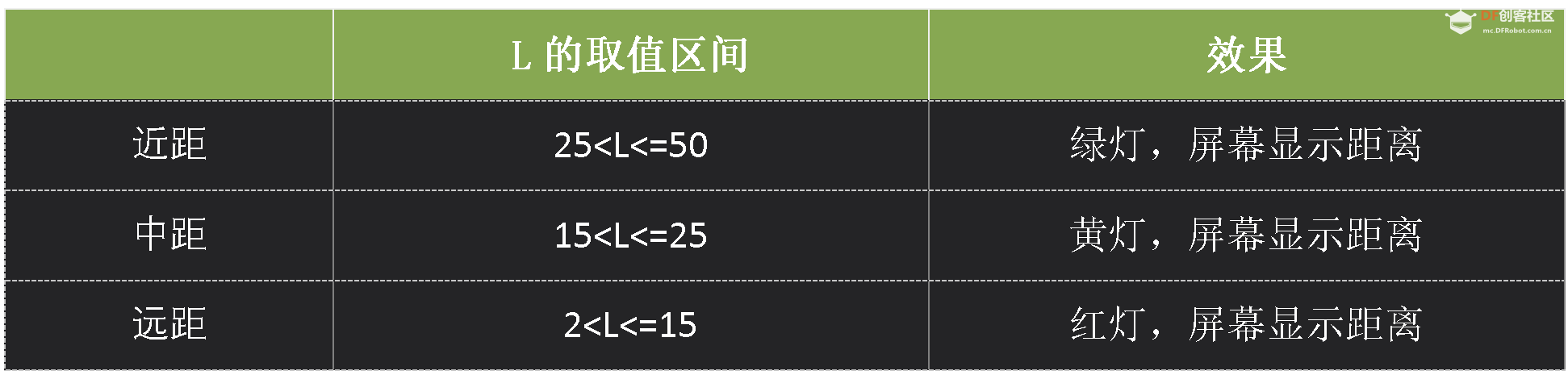 编写不同距离的程序,25-50区间的程序如下。 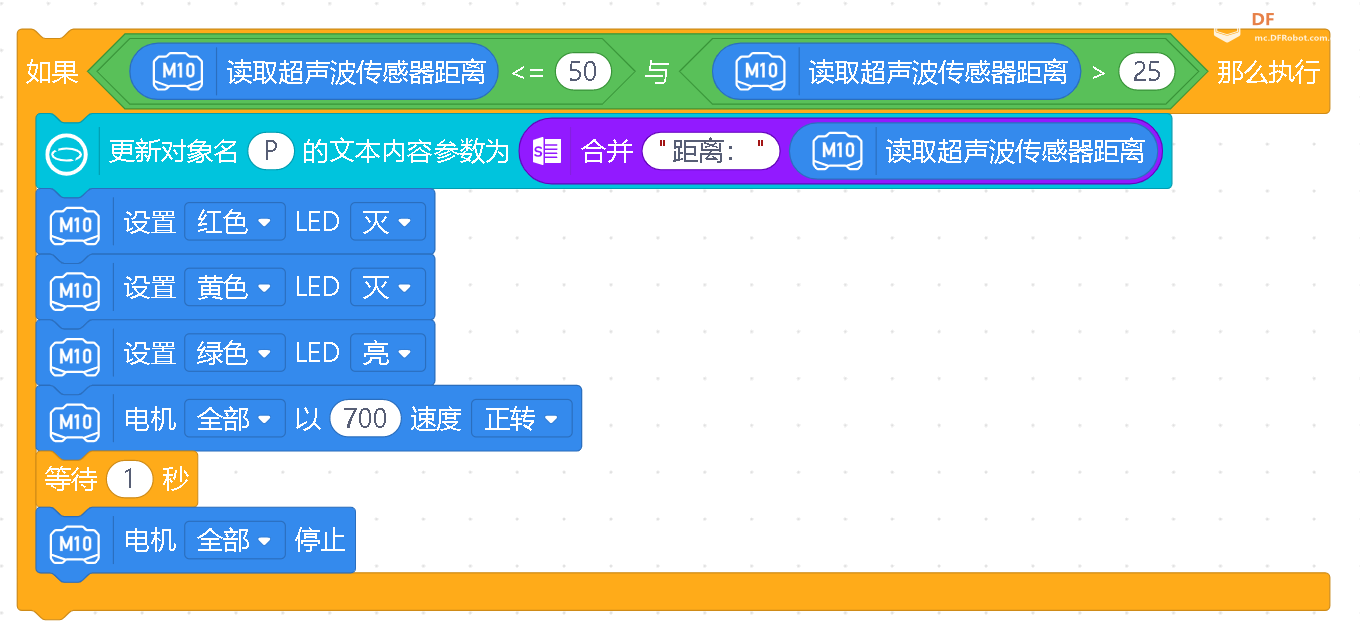 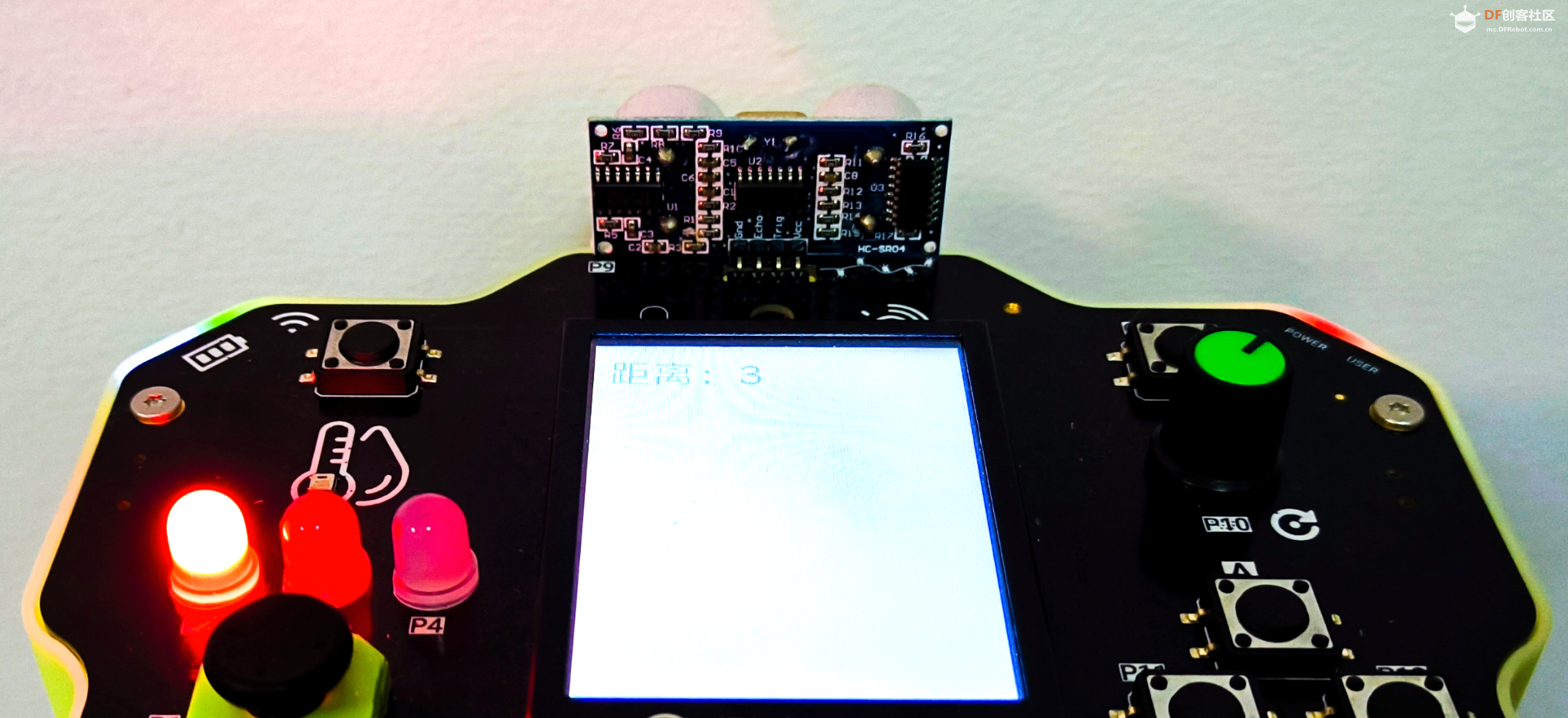 Step03:点击拓展,在官方库中添加OpenCV库如下图所示。  由于本程序中既涉及到视频又涉及到主程序中小车的运动,为避免视频卡死,将视频采集定义线程。多线程指令在行空板指令集中,如下图所示。 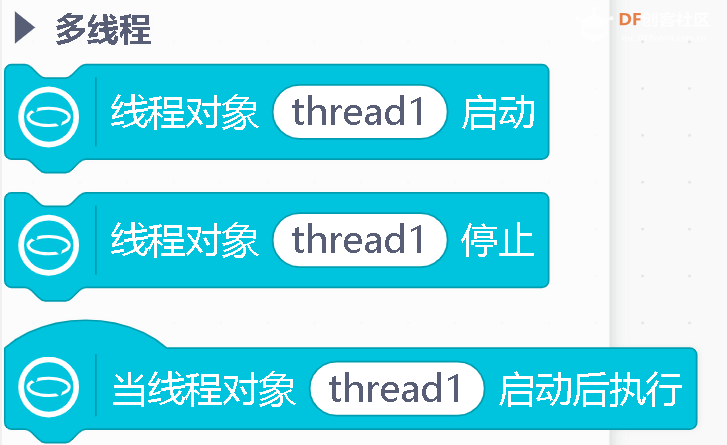 Step04:编程实现功能,主程序循环部分运行前线程thread1,循环中执行测距检测判断逻辑。完整程序如下所示(选做) 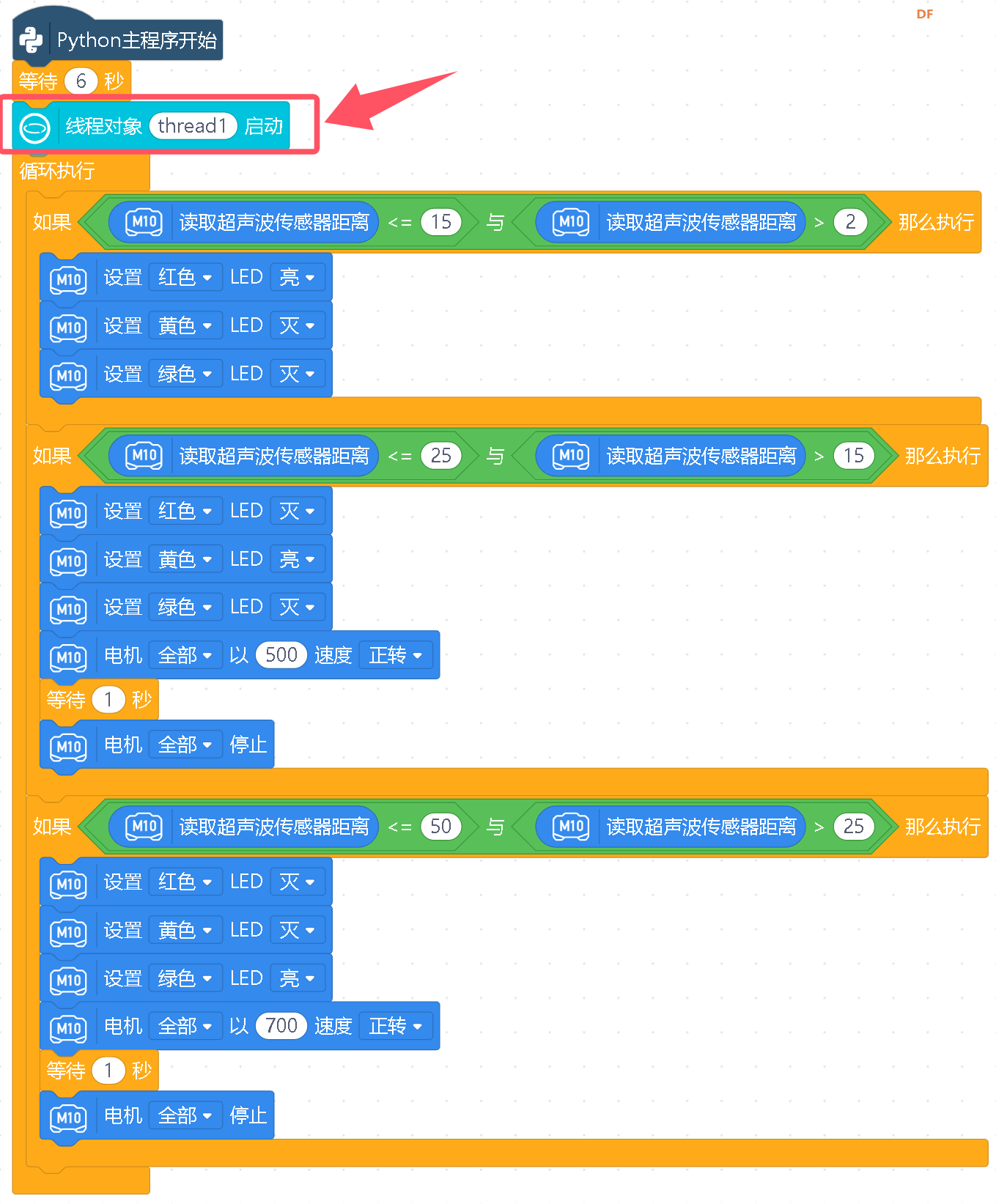 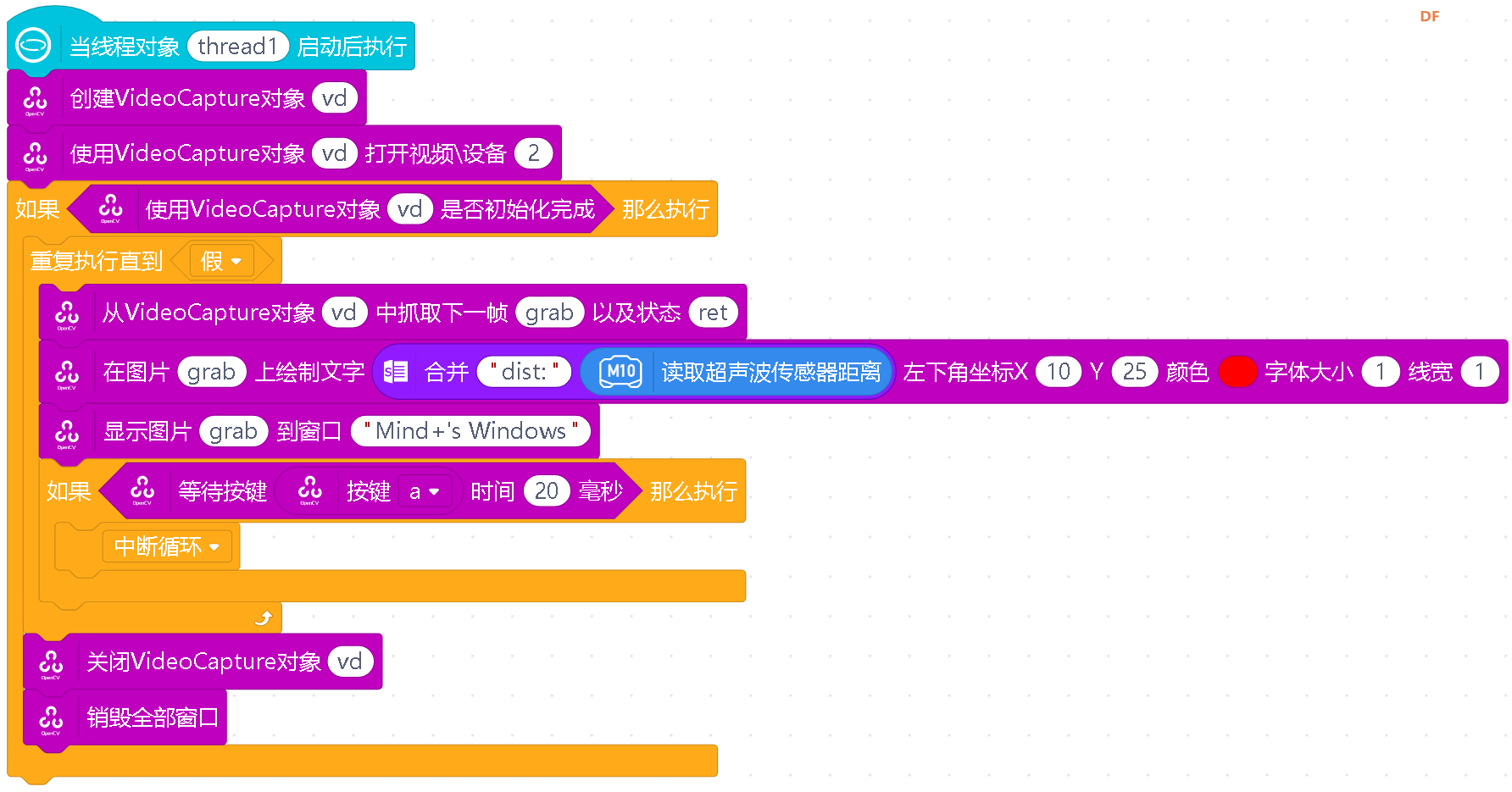 信息科技实验(苏教版)——模拟公交卡充值扣费过程 信息科技实验(苏教版)——体验智能开发板连接Wi-Fi 信息科技实验(苏教版)——探究蓝牙的数据传输距离 |
514.01 KB, 下载次数: 0
514.77 KB, 下载次数: 0



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed


 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶

 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 版主限定
版主限定
 牛X认证
牛X认证
 创作达人
创作达人
 小蘑菇
小蘑菇
 蘑菇人
蘑菇人
 蘑菇老人
蘑菇老人
 荣誉教师
荣誉教师
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 ARD DAY
ARD DAY
 编辑选择奖
编辑选择奖
 创客造
创客造
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖






