|
14015| 10
|
无线蓝牙履带车入门贴 |
|
本帖最后由 hnyzcj 于 2015-5-18 09:05 编辑 【作品介绍】 拿到DF的Devastator 履带机器人移动平台已经很长时间了,总是因为这样的或者那样的一些事情,耽误不能把小车完整的搭建起来。今天下定决心,把平台完整搭建玩一玩。这次功能上主要实现通过手柄控制小车的前进、后退、左转、右转等基本功能。 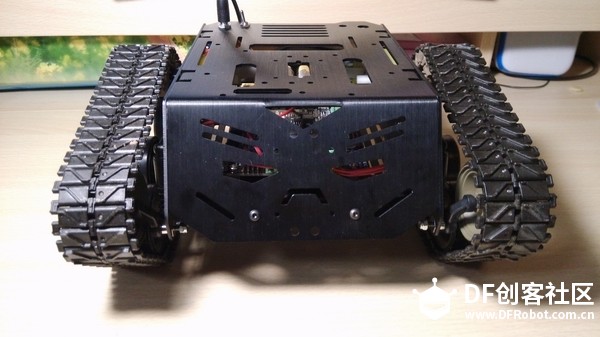 http://www.tudou.com/programs/view/HWAKm3hX2R4/ 穿越障碍 http://www.tudou.com/programs/view/BxpjusXG7ac/ 站立 【硬件列表】 1.Devastator 履带机器人移动平台 2.Romeo BLE多合一控制器 3.蓝牙4.0 无线手柄 【制作步骤】 1.机械结构搭建 参见前贴 Devastator 履带机器人移动平台——机械结构安装篇 2.器件焊接 取出Devastator 履带机器人移动平台中提供的焊接线(红正,黑负),截取适当长度连接相应器件。  用剥线钳拨开适当长度绝缘皮,与电子元器件焊接。  与履带车的左右电机焊接如下 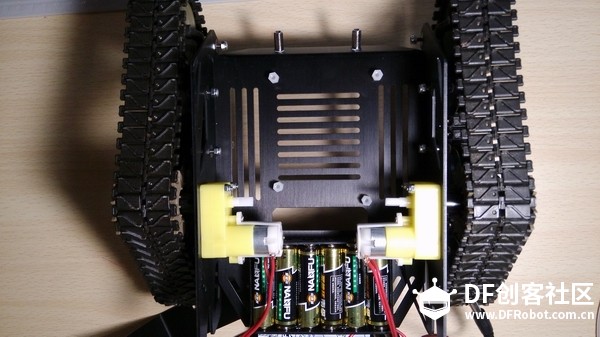 与控制器连接 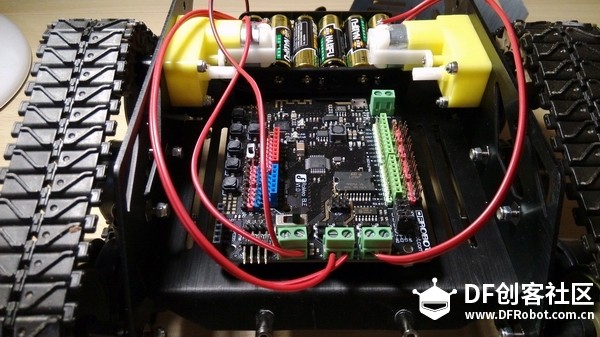 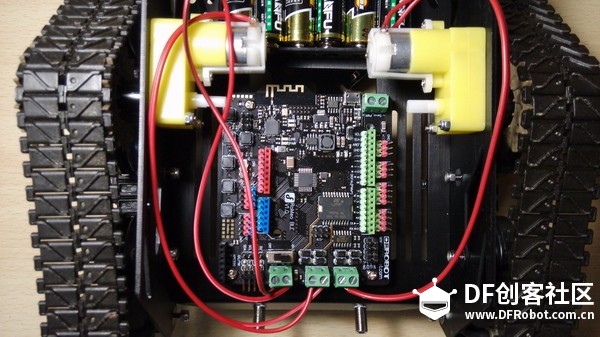 外接电源开关的焊接 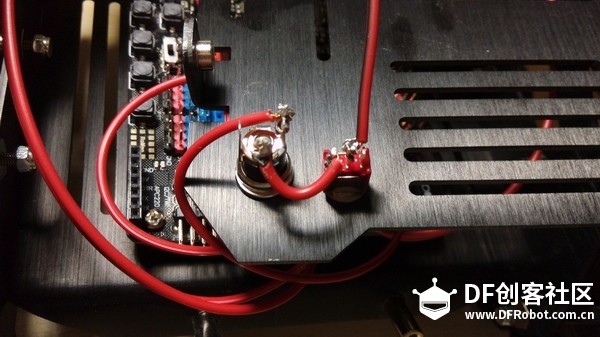 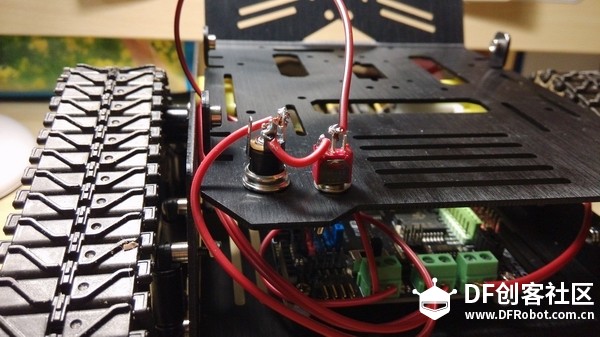 组装完成 添加手柄,DF的这款手柄绝对是初学者的福音,无需复杂设置,基本上是上电配对既可以使用。 三个控制按键,用于切换、解绑、复位等功能 SELECT键用于一键切换主从机(Mode亮灯为主机模式,Mode灯灭为从机模式) ANALOG键在主机模式下时用于一键解绑MAC地址 START键用于复位  【程序代码】 程序代码使用的是DF资料中的样例,唯一修改的是时间的延迟。把延迟弄长了些,否则履带车运动缓慢。 【总 结】 到目前为止,你已经能够轻松的搭建起一套无线蓝牙通信的履带车了。当然这些只是最基本的功能,可以说DF为大家提供的这些器材,让我等小白能够轻松的完成无线蓝牙小车平台的搭建,为其他功能的拓展提供了一个良好的平台。来吧,搞起吧,巡线、避障……等你来。 |

639 Bytes, 下载次数: 10069



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed


 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 版主限定
版主限定
 牛X认证
牛X认证
 创作达人
创作达人
 小蘑菇
小蘑菇
 蘑菇人
蘑菇人
 蘑菇老人
蘑菇老人
 荣誉教师
荣誉教师
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 ARD DAY
ARD DAY
 编辑选择奖
编辑选择奖
 创客造
创客造
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖






