|
11432| 3
|
徐州三期 校园全能王-凯伦1号 |
|
校园全能王-凯伦1号 校园多功能机器人 主要功能:校园引路、校园快递和文件分发、校园卫生打扫、除草。  我们的团队:“群商众议”队 作品介绍: 智能制造 一专多能 立足现在 面向未来 硬件及连接 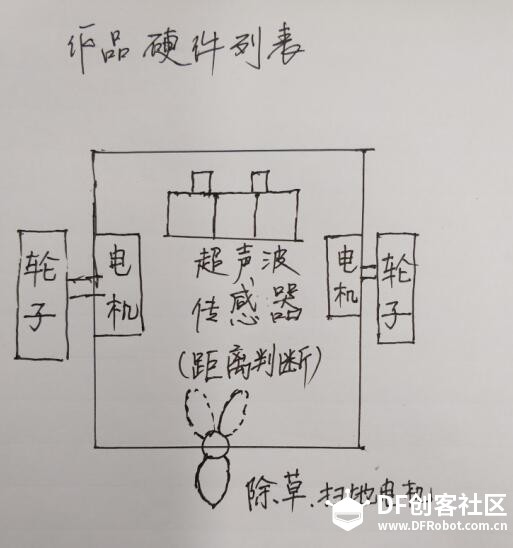 制作步骤: 1.电路连接  2.周边包围制作 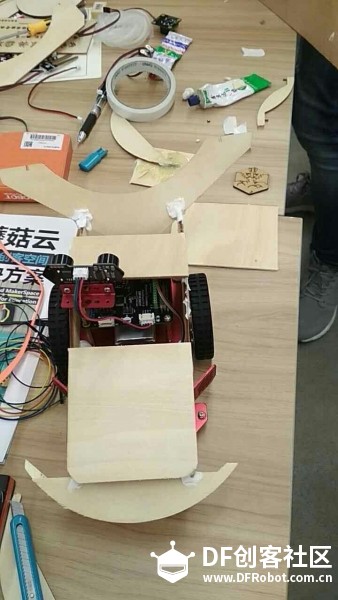  3.贴纸上色  4.除草机  5.超声波传感器  6.整体展示  代码 boolean __ardublockDigitalRead(int pinNumber) { pinMode(pinNumber, INPUT); return digitalRead(pinNumber); } void setRomeoMotor(int motorId, int speed) { int speedPin, directionPin; if (motorId == 1) { speedPin = 6; directionPin = 7; } else { if (motorId == 2) { speedPin = 5; directionPin = 4; } else { return; } } if (speed == 0) { digitalWrite(speedPin, LOW); } if (speed > 0) { digitalWrite(directionPin, HIGH); analogWrite(speedPin, speed); } else { digitalWrite(directionPin, LOW); analogWrite(speedPin, -speed); } } void __ardublockDigitalWrite(int pinNumber, boolean status) { pinMode(pinNumber, OUTPUT); digitalWrite(pinNumber, status); } int ardublockUltrasonicSensorCodeAutoGeneratedReturnCM(int trigPin, int echoPin) { long duration; pinMode(trigPin, OUTPUT); pinMode(echoPin, INPUT); digitalWrite(trigPin, LOW); digitalWrite(trigPin, HIGH); duration = pulseIn(echoPin, LOW); duration = duration / 59; if ((duration <=0) || (duration > 45000)) return false; delay(50); return duration; } void setup() { pinMode( 7 , OUTPUT); pinMode( 6 , OUTPUT); pinMode( 5 , OUTPUT); pinMode( 4 , OUTPUT); digitalWrite(4, LOW); digitalWrite(5, LOW); digitalWrite(6, LOW); digitalWrite(7, LOW); pinMode( 8 , OUTPUT ); pinMode( 12 , INPUT ); digitalWrite( 8 , HIGH ); delay(500); } void loop() { if (__ardublockDigitalRead(3)) { setRomeoMotor(1, 200); setRomeoMotor(2, 200); delay( 2000 ); setRomeoMotor(1, 100); setRomeoMotor(2, 200); delay( 2000 ); setRomeoMotor(1, 200); setRomeoMotor(2, 200); delay( 2000 ); setRomeoMotor(1, 0); setRomeoMotor(2, 0); } else { setRomeoMotor(1, 0); setRomeoMotor(2, 0); } if (__ardublockDigitalRead(5)) { setRomeoMotor(1, -200); setRomeoMotor(2, -200); delay( 2000 ); setRomeoMotor(1, -100); setRomeoMotor(2, -200); delay( 2000 ); setRomeoMotor(1, -200); setRomeoMotor(2, -200); delay( 2000 ); setRomeoMotor(1, 0); setRomeoMotor(2, 0); } else { setRomeoMotor(1, 0); setRomeoMotor(2, 0); } if (__ardublockDigitalRead(2)) { __ardublockDigitalWrite(8, HIGH); delay( 5000 ); setRomeoMotor(1, 0); setRomeoMotor(2, 0); } else { setRomeoMotor(1, 0); setRomeoMotor(2, 0); } if (( ( ardublockUltrasonicSensorCodeAutoGeneratedReturnCM( 8 , 12 ) ) < ( 40 ) )) { setRomeoMotor(1, 200); setRomeoMotor(2, 200); setRomeoMotor(1, map ( ardublockUltrasonicSensorCodeAutoGeneratedReturnCM( 8 , 12 ) , 3 , 40 , 60 , 255 ) ); setRomeoMotor(2, map ( ardublockUltrasonicSensorCodeAutoGeneratedReturnCM( 8 , 12 ) , 3 , 40 , 60 , 255 ) ); } else { setRomeoMotor(1, 0); setRomeoMotor(2, 0); } } 总结:通过学习,我们了解Arduino的主板连接和电路连接,后期小车还可以开发更多的连接和应用。 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶






