|
12851| 2
|
华小佗:摇摇头点点头,让你的机器人动起来 |
|
项目简介: “她是耐心的护士向你解释你的病情,她是细心的护工让基础检查从此不再繁杂,她也是你贴心的家人让你的病房生活不再单调。”她就是华小佗,一个置于病房中的小型陪护机器人,负责信息沟通,生活照料和情感陪护。  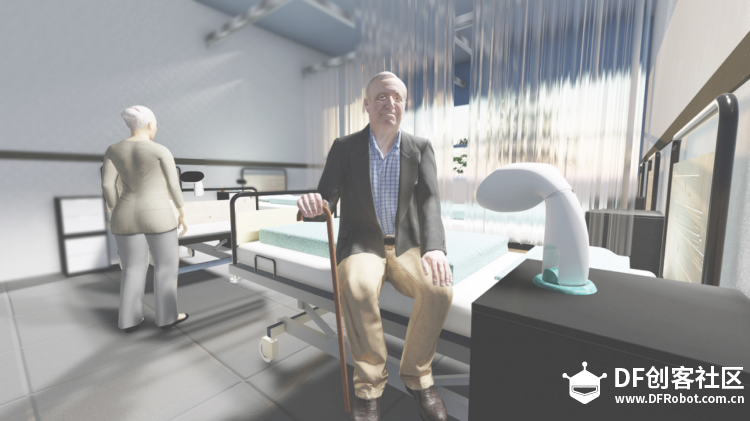 硬件清单: Arduino UNO 伺服电机*2 intel RealSense SR300 LattePanda 2G/32GB LattePanda 7-inch 1024 x 600 IPSDisplay 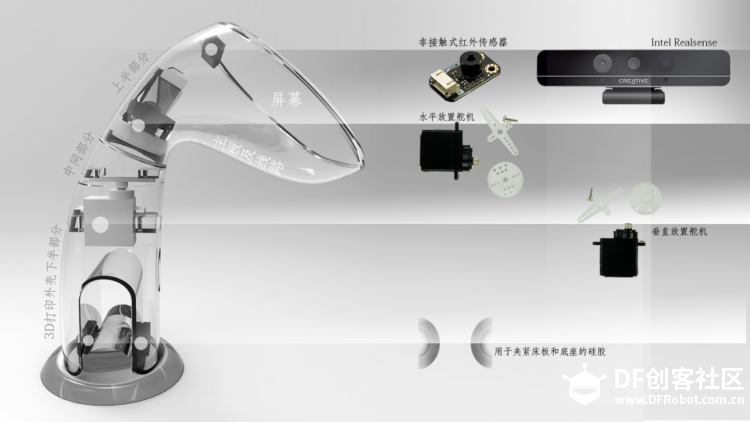 要设计一个如此小巧的机器人,我们要做的首先就是不能浪费一丝丝空间,在寻找已有的机械臂无果后我们决定自己设计简单的机构让华小佗机器人动起来。 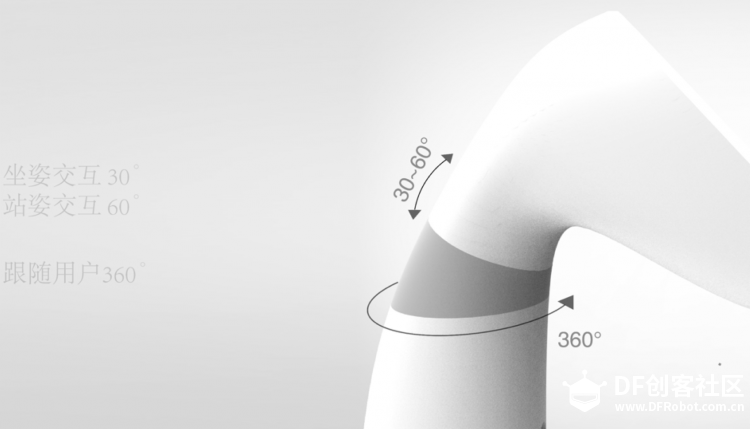 对于花小佗我们设置了两个方向的运动,水平旋转和竖直方向,通过两个方向的运动组合让它与用户的交互变得灵动有趣,更重要的是能够随时面对人。 -------------------以下是简单的机构设计的分享------------------------ 我们对华小佗运动的设计和实现主要分为五部 Step1: 通过不同的使用情境确定其运动方式 Step2: 结构草图绘制 Step3: 舵机尺寸绘制与 部件建模 Step4: 3D打印结构件 与装配 Step5: 编写代码并测试 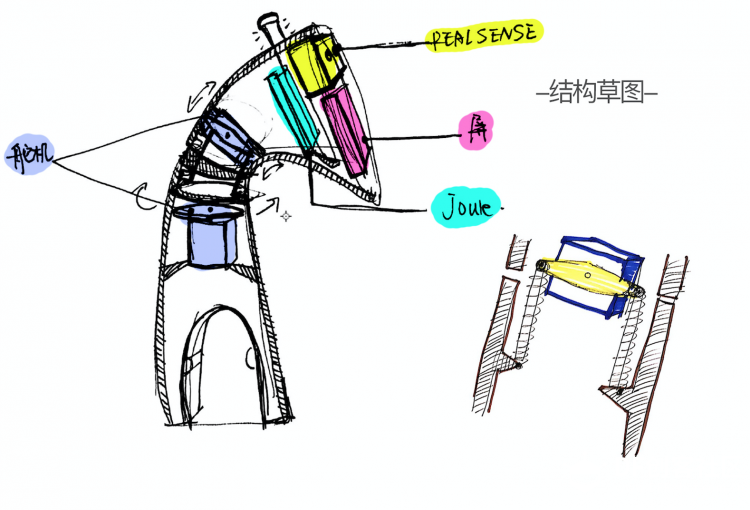   小tips:如果舵机的力量不够可以添加齿轮等机构。 --------------控制舵机点头摇头的代码-------------- [mw_shl_code=applescript,true]#include <Servo.h> // 声明调用Servo.h库 Servo servoRight; Servo servoUp; int posR = 90,posU=120 ; int turnR = 1,turnU = 1; void setup() { servoRight.attach(11); servoUp.attach(10); } void loop() { /* 左右运动 引脚11 */ if(turnR==1) { for(posR = 0; posR < 180; posR += 1){ servoRight.write(posR); delay(15); } for(posR = 180; posR>=0; posR-=1) { servoRight.write(posR); delay(15); } } /*上下运动 (引脚10 */ if(turnU==1) { for(posU = 75; posU < 120; posU += 1){ servoUp.write(posU); delay(15); } for(posU = 120; posU>=75; posU-=1) { servoUp.write(posU); delay(15); } } } [/mw_shl_code] 如果大家对于我们的设计以及技术的使用有什么建议的话请不吝赐教! |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶

 编辑选择奖
编辑选择奖






