|
11299| 5
|
[项目] 【开源机器人-蜥蜴】9-15更新,履带底盘部分完结 |
|
先上效果图 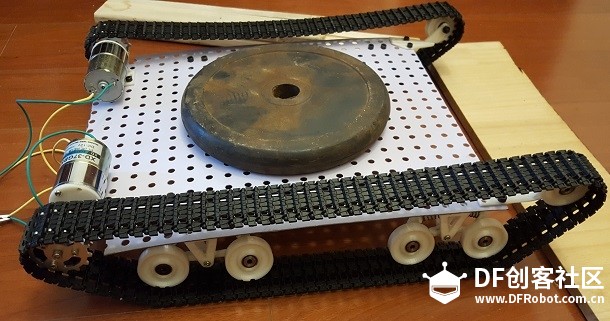 上面放个杠铃片,2公斤,一样可以轻易过障碍 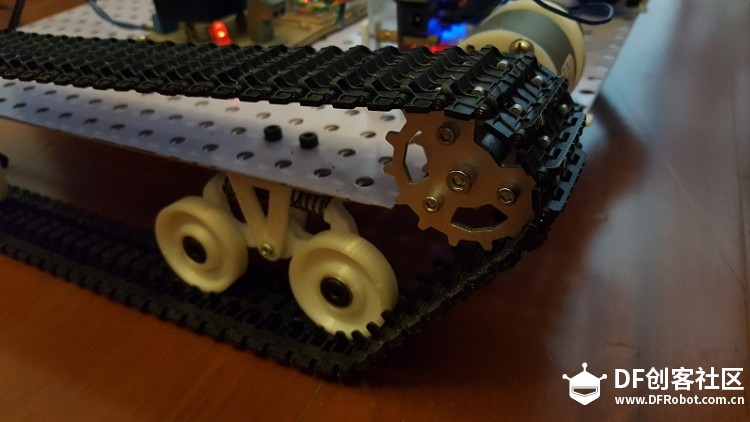 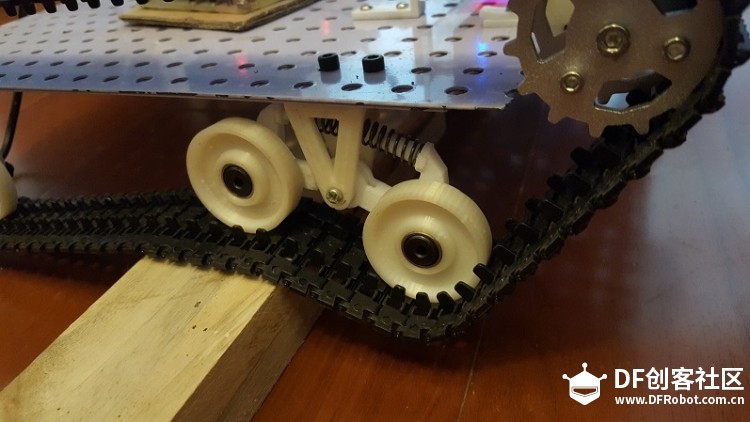 悬挂的表现还不错 ------------------------------------------------------------ 这个小“宠物”是自己业余时间做着玩的,最近工作有些忙。而且没有阶段性进展,也有点不好意思发上来(有时候需要改动)。好久没更新了,真是不好意思 不说废话了,先上图 距离底盘部分初步可以动起来,还差一个前导轮的支撑结构 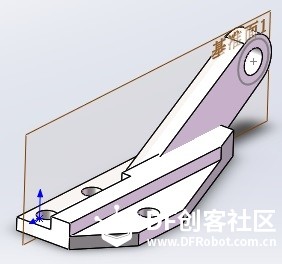 这么简单的一个结构,这已经是第三版,针对前两版进行了加粗加强。这东西,打印出来用手掰一掰,觉得强度不错了,但是需要受力的时候还是不够。一是塑料毕竟不比金属强度大,二是3D打印本身也比注塑成型强度差不少,三是对机械结构专业内容(材料力学?)一点都不懂,缺乏最起码的估算(感觉应该可以用打印出来的东西,比如可以专门打印一个标准件,大体估算材料的各种强度特性吧)。这一点上,有点像民科了---- 完全靠感觉,哈哈 。好在3D打印成本低,多试几次不用花什么钱 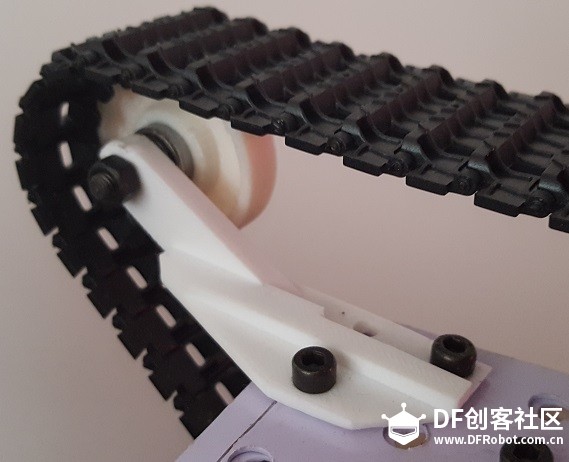 底盘的主体部分,也就是真正的“底盘”,用洞洞板来充当。这是挂铁丝钩子、上面挂工具、卖品用的,可以按要求裁切。选一个稍微厚一点的,让店家帮裁切成合适的尺寸。 如果只是搭载电子设备之类重量不大的,单层就可以了,我这里想要强度大点,让店家切了两块一样大的,重叠在一起,从上图也可以看出。  需要提一句的是,由于电机及驱动轮的安装位置和履带的环绕,洞洞板需要裁掉一个角 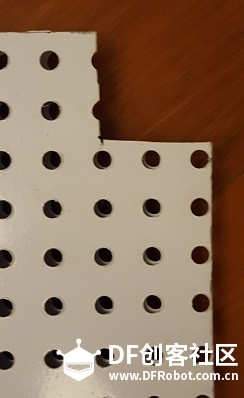 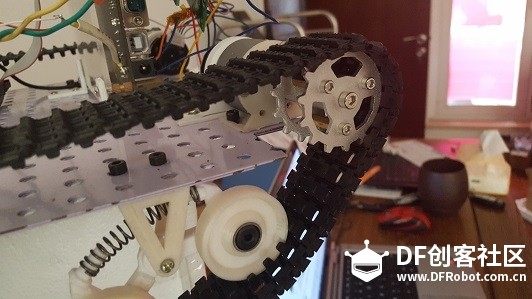 电机及固定部分: 本来的计划中,电机的测速应该是很简单的一个问题,我已经买好了相关的东西:码盘、光耦,还打印了相应的小部件 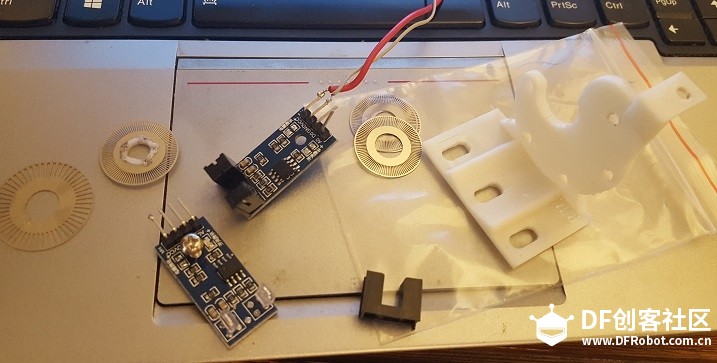 然而忙活了几天还是觉得,需要的精度对于3D打印来说有点太高了,所以最终还是决定放弃原来的电机,转而买带测速机构的减速电机 如果有朋友已经跟着我买了前面的电机,真的是抱歉了  这个电机除了前面有减速器之外,尾巴上还带一块磁铁,带两个霍尔开关传感器,可以输出两路脉冲信号。提醒一下,我买的这家淘宝页面上给出的接线是错的,要跟客服要。 主要规格:37(尺寸),空载转速178,负载转速112,电压12V,霍尔传感器的电源(包括com)与电机电源分开,这样电机和测速可以分用两组电池(或者电源)供电。霍尔传感器可工作于3.3V。 下面是电机固定部分。 电机、减速器(及测速机构)是一个整体,驱动轮通过联轴器与电机减速器刚性连接,这样所有这几个组件成为一个整体固定在底盘上。 在调试过程中意识到一个重要问题,就是驱动轮的角度需要比较精确,不能有角度上的移动,否则会导致履带脱落。 由于在负重、启动、上坡过程中,驱动轮的受力还蛮大的,所以要求对电机/驱动轮组件的固定要有足够的强度。 经过多次尝试,现在采用下面这种两件组合的结构来固定电机,还算不错。 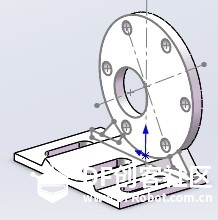 上图是电机侧面固定在底盘上的部分,如果有朋友跟着做的话要注意一下,这张图有一个大的圆孔是用于电机轴承伸出来的,这个孔的位置导致这个结构在左右两侧不是一样的,而是对称的。 打印的时候如果同样的东西打两份,那么对侧的转过180度后出轴孔的位置就不一样了,所以一定要做一下调整。在3D打印切片软件Cura里有个功能“对称”,可以生成一个对称的物件,所以就不必做两份设计文件了,直接在cura里面修改就好。 下图是固定结构的另一部分 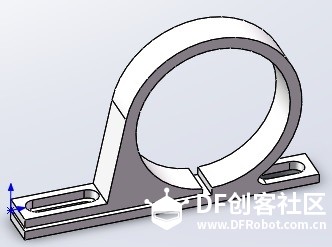 固定好之后是这个样子的:  到此,这一阶段需要的部件都已经准备好了,用螺丝把他们拼装起来,就可以了。 后续将是对电机的驱动控制电路部分,敬请期待~~ |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶








