|
14131| 6
|
[求助] 求助能够实现控制超声波和红外控制模,使他们与地面始..... |
|
之前做了一个智能的导盲手杖,但在做的过程中还是有很多不足。想向大家求助。 1.图片大概是这样(用的别人的图),左右两边是红外传感器,中间是超声波。但是在盲人拿导盲手杖的时候,传感器会与地面形成一个夹角,但是我想让他始终与地面保持水平。应该怎么办呢? 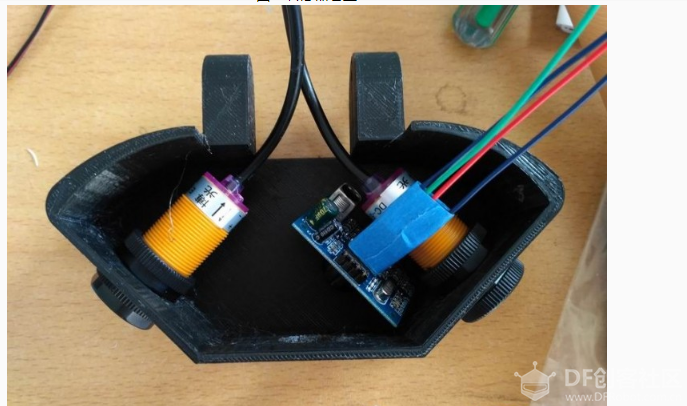  |
| 你这里可以加一个三轴加速度传感器,或者水平传感器,在拐杖运动的过程中你调出数据,并给这两个传感器加个两自由度的云台,Z轴不需要加,X和Y轴你需要加两个舵机,在拐杖的运动过程中控制舵机转一定角度始终保持水平,但是这里会有很多问题,防抖动以及延时问题,你可以试试看,希望本回复能帮到你, |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶








