|
35897| 6
|
[项目] 当百灵鸽遇上OTTO——载“鸽”载舞的小“奥拓” |

|
本帖最后由 Nplus实验室 于 2019-11-8 18:31 编辑 OTTO身为一名萌宠,受到的关爱自然增加不少,不少人一直想为OTTO机器人增加不同的扩展或者使用不同的主板来实现OTTO的各种变身。  材料: 3D打印件 X若干 掌控板 X1 百灵鸽扩展板 X1 舵机 X4 超声波传感器 X1 M4X6铜柱 X2 M4X10 螺丝 X2 M3X10 螺丝 X2 组装过程(多图预警): 重点:要先将所有舵机归位到90° (一) 给脚板加铜柱:  两个大脚板和M4铜柱   用手或者其他工具将铜柱按进“脚后跟”的孔中,目的是待会固定脚板和舵机 (二) 组装身体里上的两个舵机: 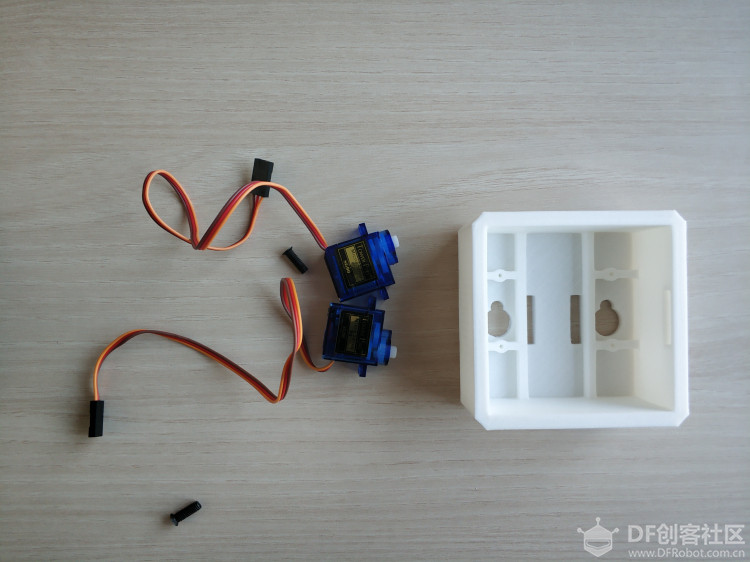 先将脚板拿走,拿出OTTO身体和两个舵机、舵机的M2螺丝X4。   按照身体的口的方向,用螺丝固定好两个舵机。 (三) 将两个腿安到身体上:  取出两个脚杆和两个单脚摇臂 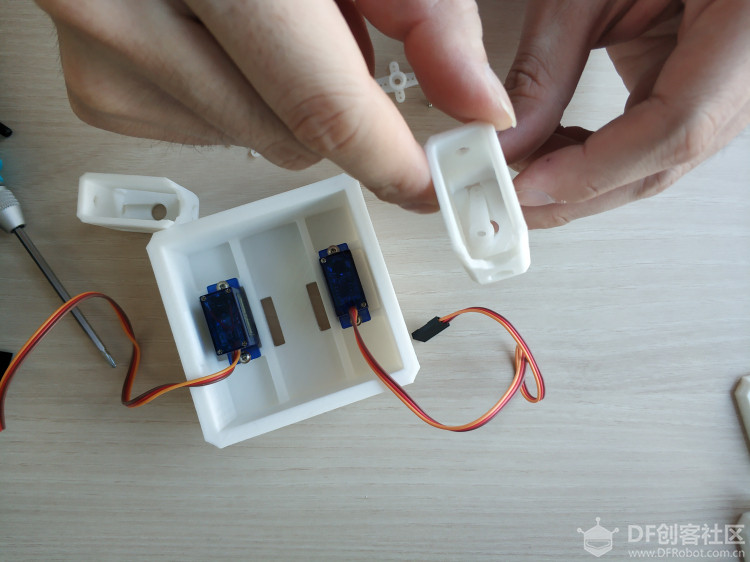 将摇臂装到脚杆对应位置   这一步比较难,最好有工具帮助 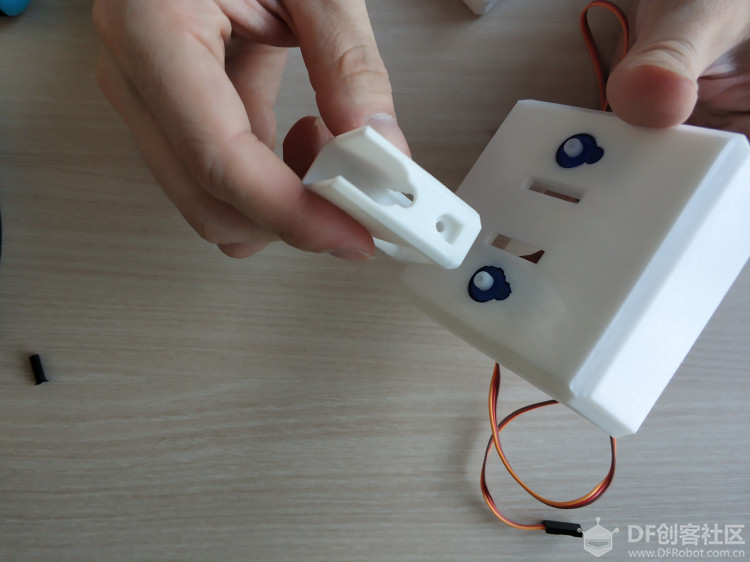 将身体翻过来,对应好位置。 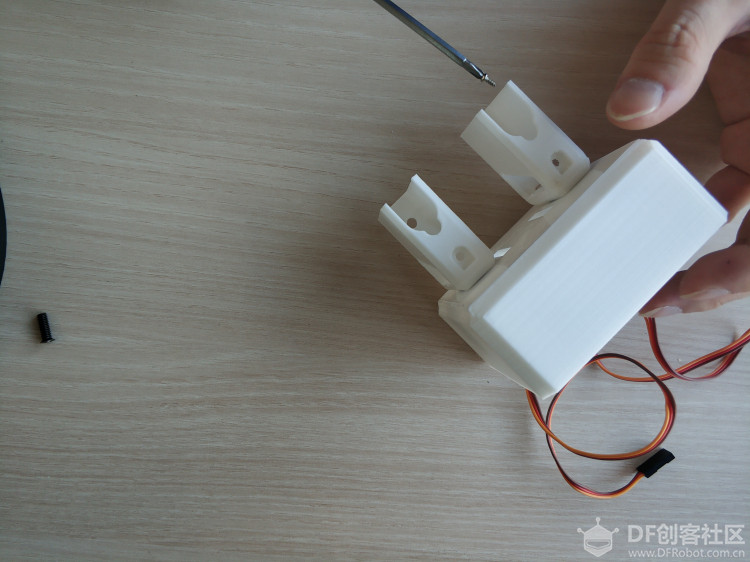 使用螺丝固定好脚杆。  此面为正面 (四) 固定脚踝的舵机和大脚板:  按照缺口放好舵机  把舵机的线从身体下方穿到身体内  将大脚板套着脚踝的舵机,先用摇臂固定好一边 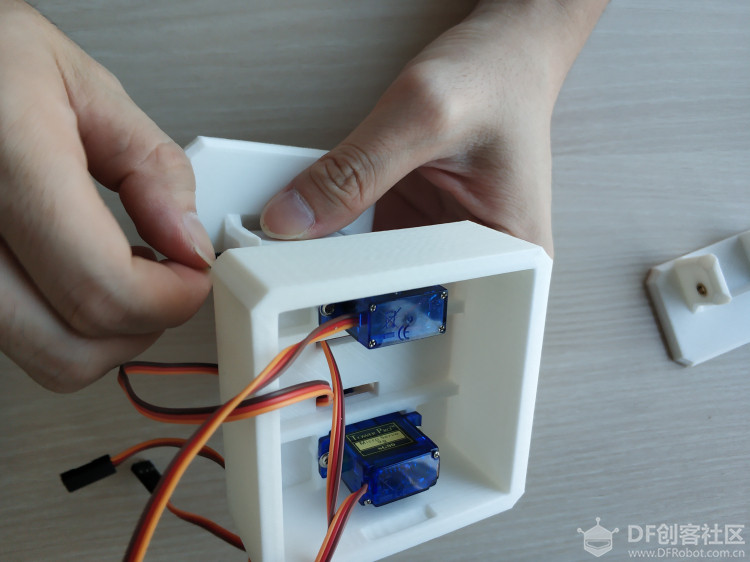 摇臂的背面用M3的螺丝固定,这样大脚板就跟舵机连好啦  成品图 (五) 将超声波和百灵鸽装到头上:  百灵鸽使用四个M3X6螺丝固定 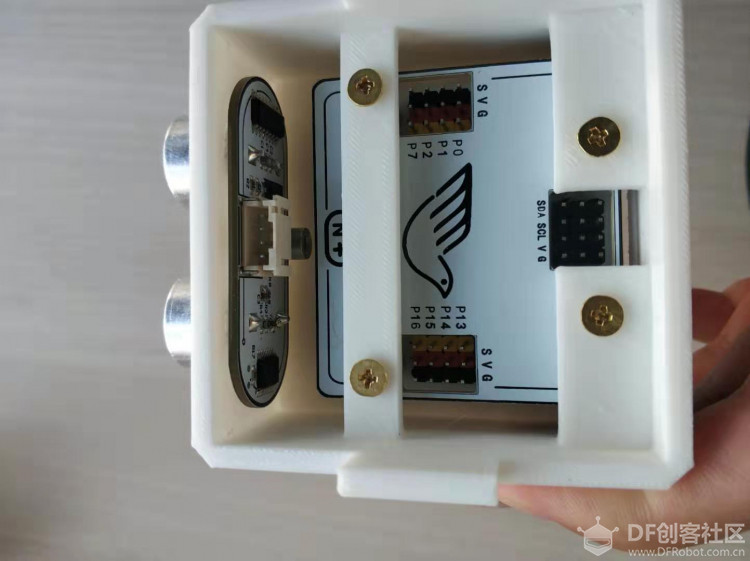   (六) 连线,大功告成: 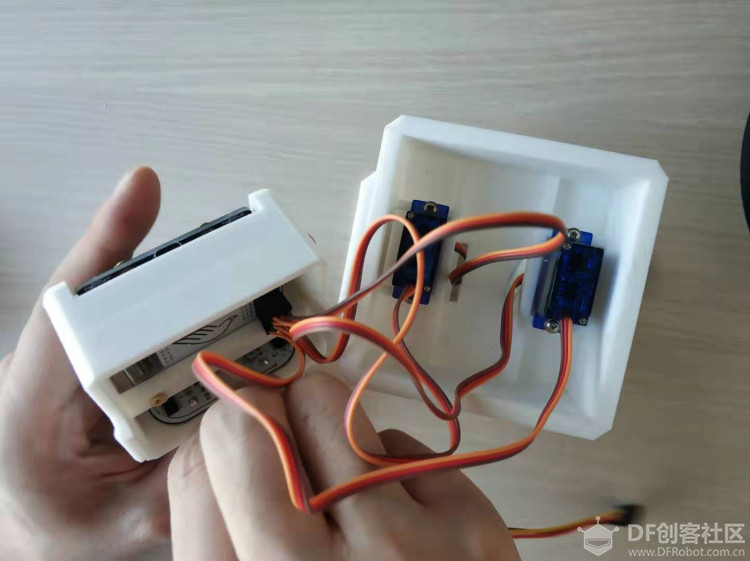 将四个舵机和超声波连接好 在程序中,正面向着我们,P13对应左脚踝、P14对应右脚踝、P15对应左关节、P16对应右关节。 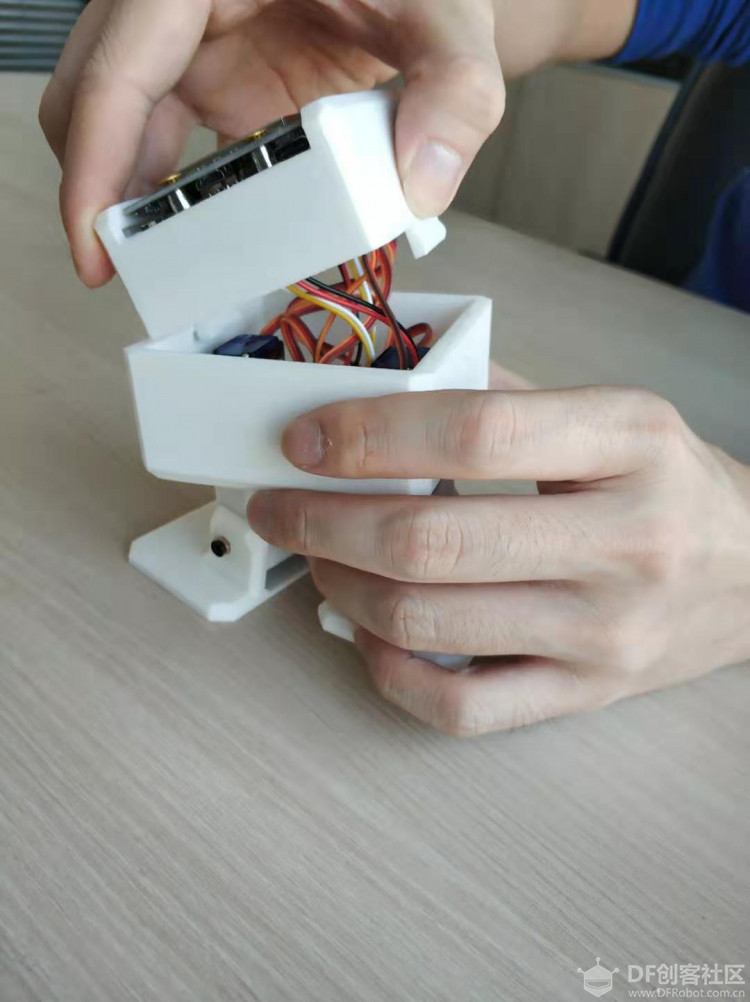 将头部按进身体侧面的卡槽,完成。  掌控百灵鸽OTTO,完成! 编程: 因为视频中的程序较长,我们已经打包好(包括OTTO的3D文件),如果有兴趣,大家可以自行下载打印出来哦。 |

94.38 KB, 下载次数: 7389



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed


 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 悔悟卡
悔悟卡 匿名卡
匿名卡






