|
9140| 0
|
[高级教程] 【N+】千里马Plus项目式课程 - 02 循迹行驶 |
|
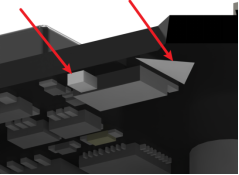
本帖最后由 Nplus实验室 于 2023-4-3 10:42 编辑 【N+】千里马Plus项目式课程 02 循迹行驶 - N+桃李科教 下一篇:【N+】千里马Plus项目式课程 - 03 识色运动 教学目标 1.认识循迹传感器; 2.学习循迹传感器的使用; 3.实现循迹传感器巡线的功能。 教学准备 千里马、地图、数据线 教学过程 导入 → 认识循迹传感器 → 分析巡线原理 → 项目程序 → 总结 1.导入 (1)知识回顾: 1.千里马固件烧录注意事项:左侧轮子边上有一个开关,烧录不同的固件,开关拨动的方向是不同的,靠近车尾那一端有一个“三角形”的符号。
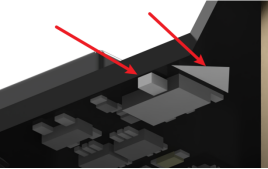
2.转弯原理:通过速度差进行转弯,一种是方向相同产生速度差,另一种是方向相反产生速度差。 (2)智慧交通 上节课已经初步了解了千里马的基本功能,接下来,我们将学习千里马的更多功能,完成各种各样的智慧交通项目。 观看视频千里马的视频《循迹行驶》 2.循迹传感器 2.1认识循迹传感器 千里马的巡线传感器是根据反射式光电传感器原理开发的。千里马底部朝上,从右至至左,分别为D1、D2、D3、D4巡线探头。 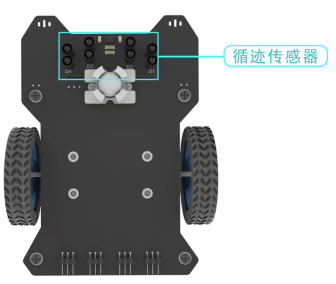 2.2编程语句 1.循迹行驶需要用的编程语句如下:
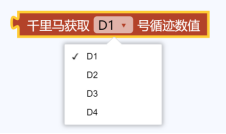
2.3分析探头 2.3.1 获取探头数值 目标:屏幕显示循迹传感器探头获取的数值。 1.屏幕显示 1.千里马屏幕的尺寸是256*192,如下图所示。 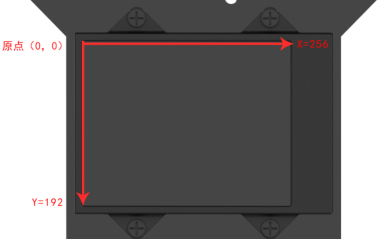 2.屏幕显示需要用的语句,如下表所示。
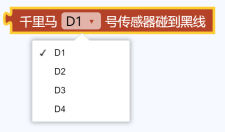
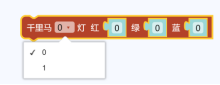
3.屏幕显示需要用的语句,如下表所示。 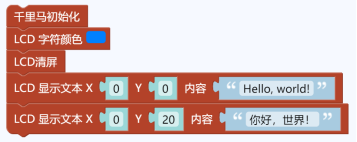  2.显示探头获取数值 1.屏幕显示D2探头的循迹值。运行程序后,让D2探头检测有颜色的物体,可以发现,颜色越深,数值越大,黑色的数值大于200以上。 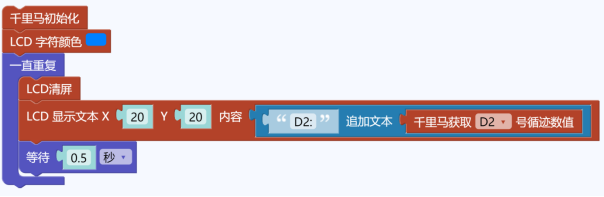  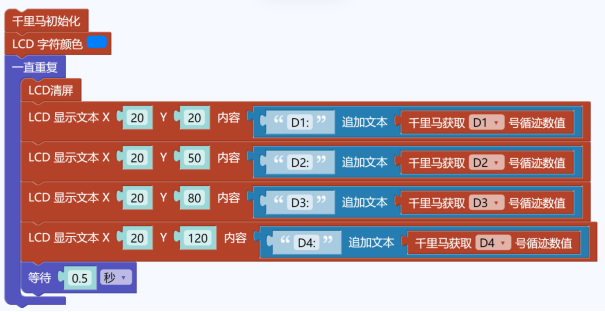 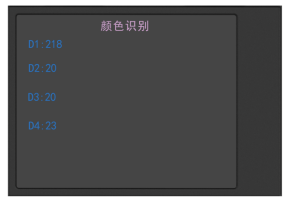 2.3.2判断探头状态 目标:判断D2探头是否碰到黑线,碰到黑线后,两只耳朵亮红灯,否则亮绿灯。 1.亮灯 1.控制千里马耳朵上RGB灯的编程语句如下。
 2.千里马两个耳朵的灯亮红色2s,然后绿色1s,最后关闭。程序如下: 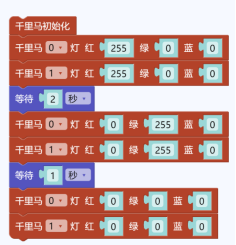 2.根据状态亮灯 千里马初始化,设置循迹阈值,如果D2探头碰到黑线,两只耳朵亮红灯,否则亮绿灯。加上循环和延时,程序如下: 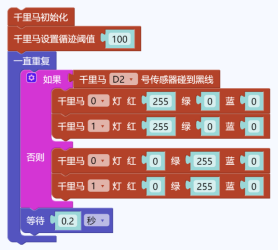 3.循迹行驶 3.1两路循迹 两路巡线,只需要使用中间两个探头进行巡线,也就是D2、D3。 3.1.1两路循迹分析 因为使用的是两个探头,所以千里马没有办法走岔路口。若巡线传感器探头碰到黑线,设为1;白色为0。对巡线过程遇到的情况进行分析,如下表所示:
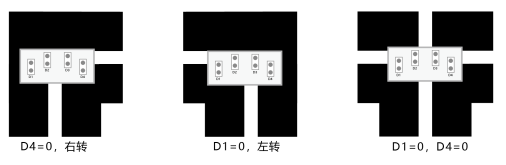
 3.1.2程序编写 1.当两个探头处在黑线时,保持直行,速度可以设置的慢一些,方便调试。  2.当D2碰到黑线,而D3碰到白线时,右转。  3.当D2碰到白线,而D3碰到黑线时,左转。  4.加上循环和延时,完整程序如下图所示。  5.刷入程序,将千里马放到地图测试,根据测试结果修改速度和阈值。 3.2四路循迹 四路循迹需要用到四个循迹探头,D2、D3让千里马沿线行驶,D1、D4判断岔路口,应该往哪边转弯。 3.2.1四路循迹分析 岔路口情况分析: D1=0,D4=0时,则说明没有遇见岔路口,千里马的移动则根据D2、D3的情况来定,D1=1,D4=1,说明遇到十字路口,可以定义怎么去行驶,但通常都是D1、D4中的某一个探头先碰到白线,偶尔才会出现同时碰到白线。具体分析如下图所示:
 3.2.2程序编写 1.新建变量“max”、“min”表示最大巡线过程中最大的速度和最小的速度,这样修改的时候直接修改变量的值即可。将变量放入二路循迹的程序中。  2.当D1碰到黑线,D4碰到白线时,右转。因为转弯角度比较大,所以速度差可以大一些。  3.当D4碰到黑线,D1碰到白线时,左转。因为转弯角度比较大,所有速度差可以大一些。  4.加上两路循迹的程序,完整程序如下图所示: 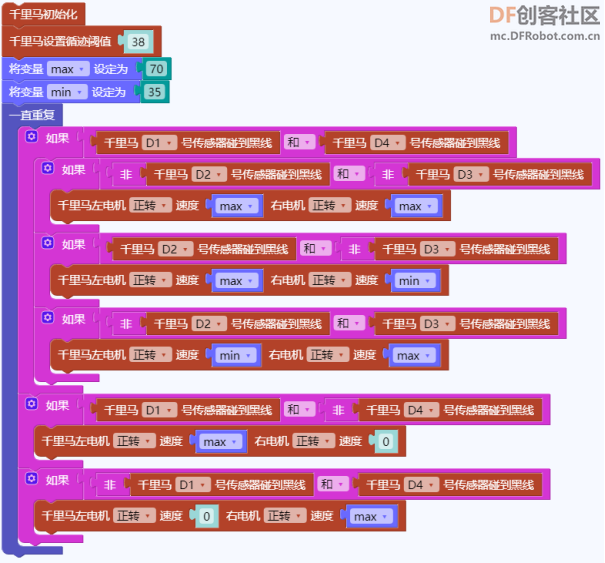 5.刷入程序,将千里马放到地图测试,根据测试结果修改速度、延时以及阈值大小。 4.总结 1.二路循迹与四路有什么区别? 2.巡线过程中需要注意什么?如何让巡线更准确? 5.课后作业 1.使用获取的循迹数值进行巡线行驶,测试过程中比较与判断是否碰到黑线有什么不同? 千里马Plus购买链接:N+千里马Plus |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed






 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶






