元器件清单
本次项目用到的元器件清单如下:
TinkerNode NB-IoT开发板 x1
TinkerNode Gravity IO扩展板 x1
Gravity:I2C ADS1116 16位ADC模块 x1
DC - DC 直流升压模块 x1
Gravity:模拟量隔离模块x1
Gravity:模拟PH计 x1
Gravity:模拟TDS传感器 x1
Gravity:DS18B20数字防水温度传感器套件 x1
3.7V锂电池 x1
3.7V锂电池电量计 x1
太阳能板5V 1A x1
USB转接模块 x1
Ps:所使用到的USB转接模块是X宝上购买的,如下图所示,由于DF没有这款产品,大家可以自行购买。

1. 项目相关功能介绍
低功耗
由于本次项目所制作的设备是在户外使用,且设备工作环境不易拉电,为了使设备在户外的工作时间更久,就需要设备尽可能的减少电量的消耗。而TinkerNode物联网开发板板载的NB-IoT模组可以借助 PSM(Power Saving Mode,节电模式)和 eDRX(Extended Discontinuous Reception,超长非连续接收)实现更长待机。接下来让我们来了解一下NB-IoT的低功耗功能。

如上图所示,可以看到NB-IoT设备在进入PSM低功耗状态时会涉及三种状态,分别是Connected State连接状态、Idle State空闲待机状态和PSM State 低功耗状态。当设备尝试从Connected State进入PSM State时,会激活两个定时器,T3324和T3412。其中,定时器T3324决定了Idle State的时间,T3412决定了两次Connected State之间的时间。也就是说,当定时器T3324超时后,设备将进入PSM State;当定时器T3412超时后,设备将退出PSM State,进入下一个Connected State,如此循环。
太阳能
为了使设备可以在户外工作的时间更久,除了需要借助PSM来降低设备的功耗外,还需要使用TinkerNode集成的太阳能电源管理模块,外接5V的太阳能板,在阳光充足时,给外接的3.7V锂电池充电。
Data Logger
TinkerNode将多余的Falsh空间转化为一个8MB大小的U盘,可以进行数据的离线存储。在本次项目中,为了避免网络连接不稳定导致数据丢失的情况,我们就可以在数据上传到云端时,将数据同时备份在TinkerNode的板载U盘中。
2. 阿里云平台配置
新建项目
和之前的教程相同,我们首先需要在阿里云平台中新建一个项目,然后为项目创建产品和设备,配置产品自定义功能(物模型)。
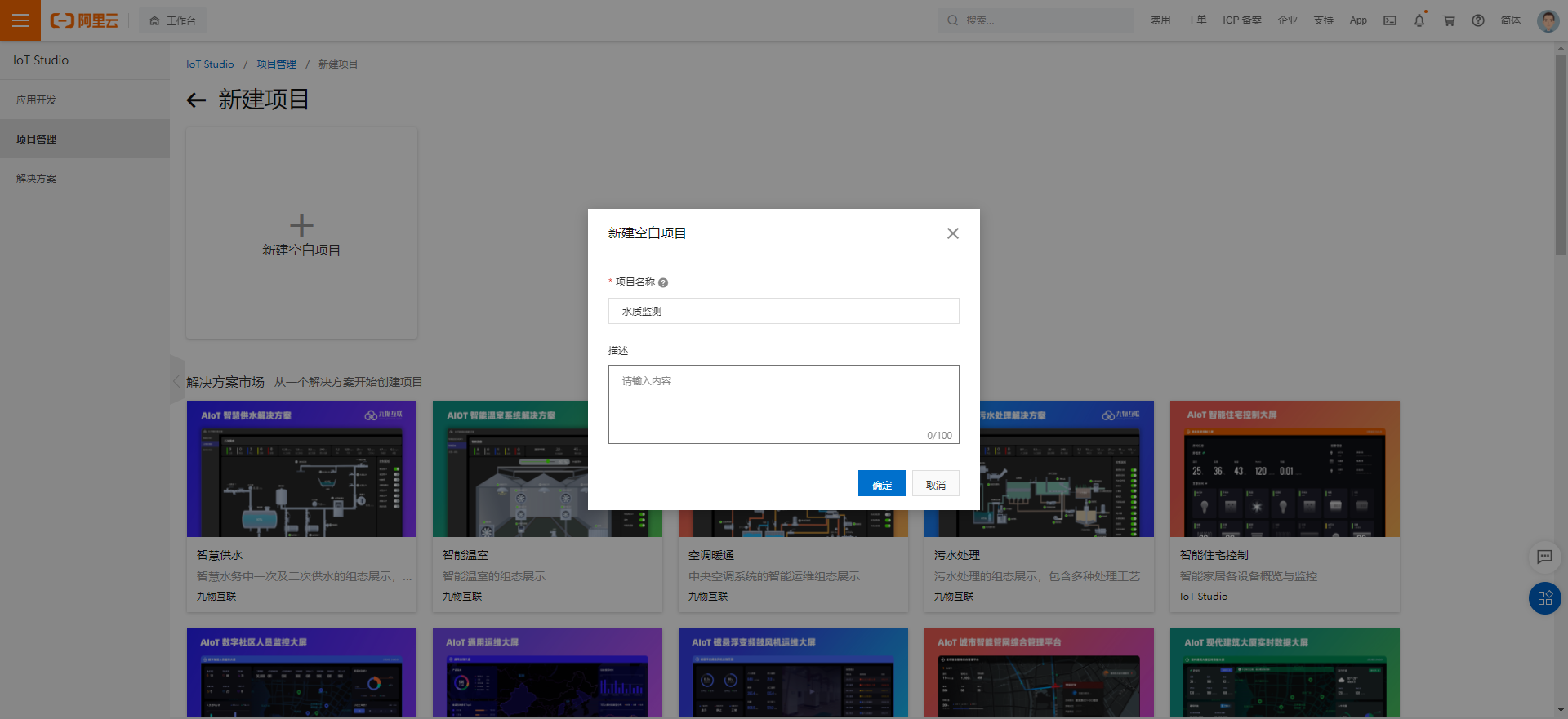
在物联网平台的页面左侧,选择IoT Studio -> 项目管理,点击新建项目,新建一个空白项目,项目名称为“水质监测”,如下图所示。
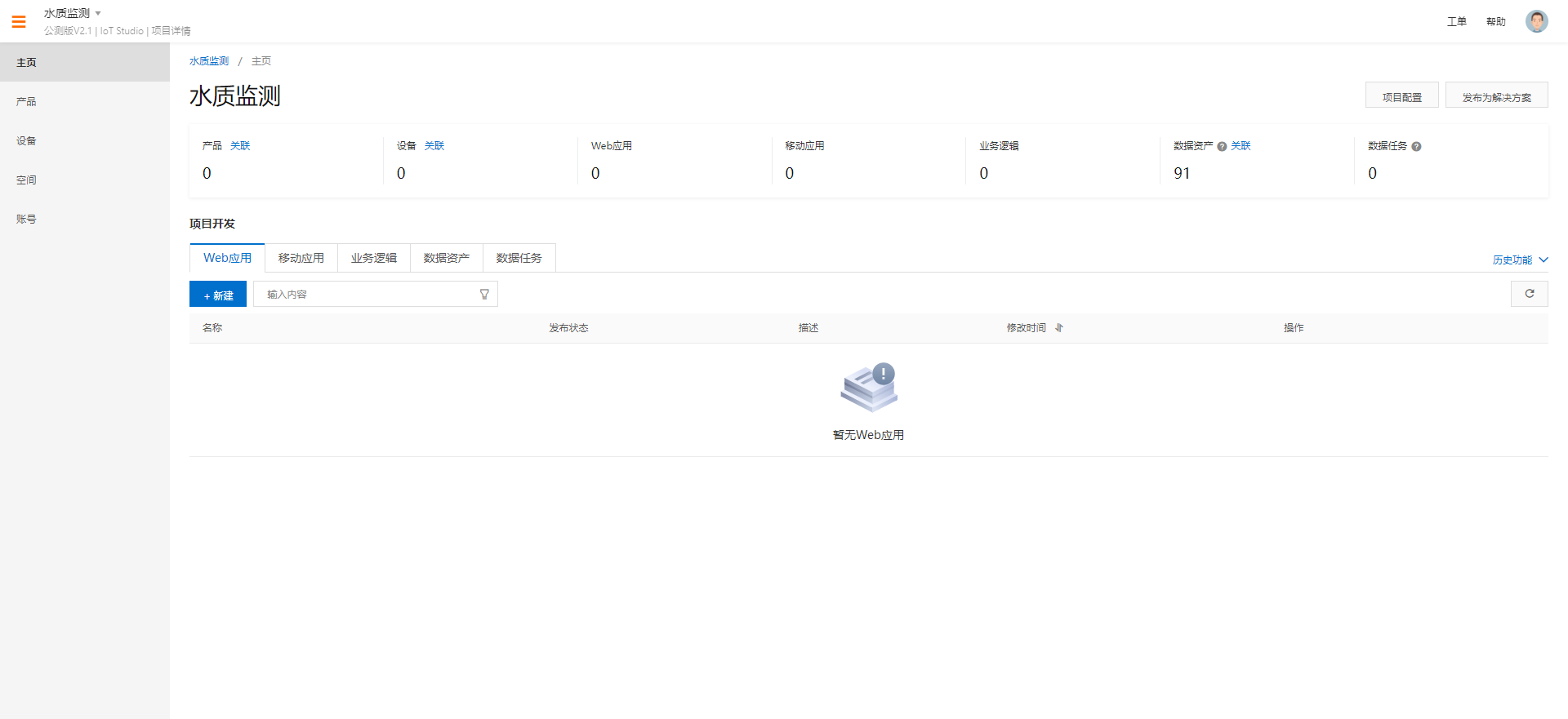
创建完成后,我们会进入“水质监测”项目的管理页面,如下图所示。
新建产品
在项目管理页面左侧的功能栏点击产品,在弹出的产品页面中选择新建产品,如下图所示。

产品的名称填写“KnowFlow”,所属品类选择“自定义品类”,其他选项默认,如下图所示。

完成后点击保存,此时已经在项目下创建了一个名为“KnowFlow”的新产品。
功能定义
接下来,我们需要为产品添加功能,也叫作定义产品的“物模型”,物模型创建的过程就是通过协议描述产品的功能,定义产品有几组传感器数据,有什么控制功能,数据的类型是什么。
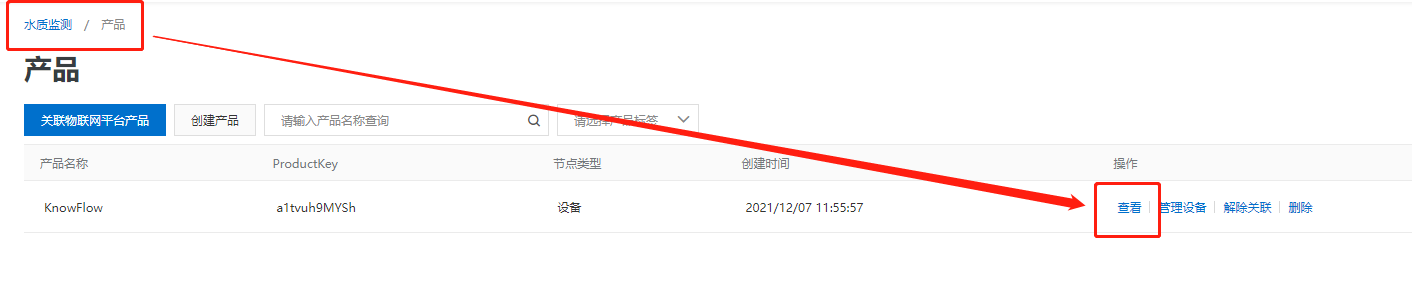
点击“KnowFlow”产品后的查看,进入产品的管理页面,如下图所示。
选择功能定义 -> 编辑草稿 -> 添加自定义功能 ,如下图所示。


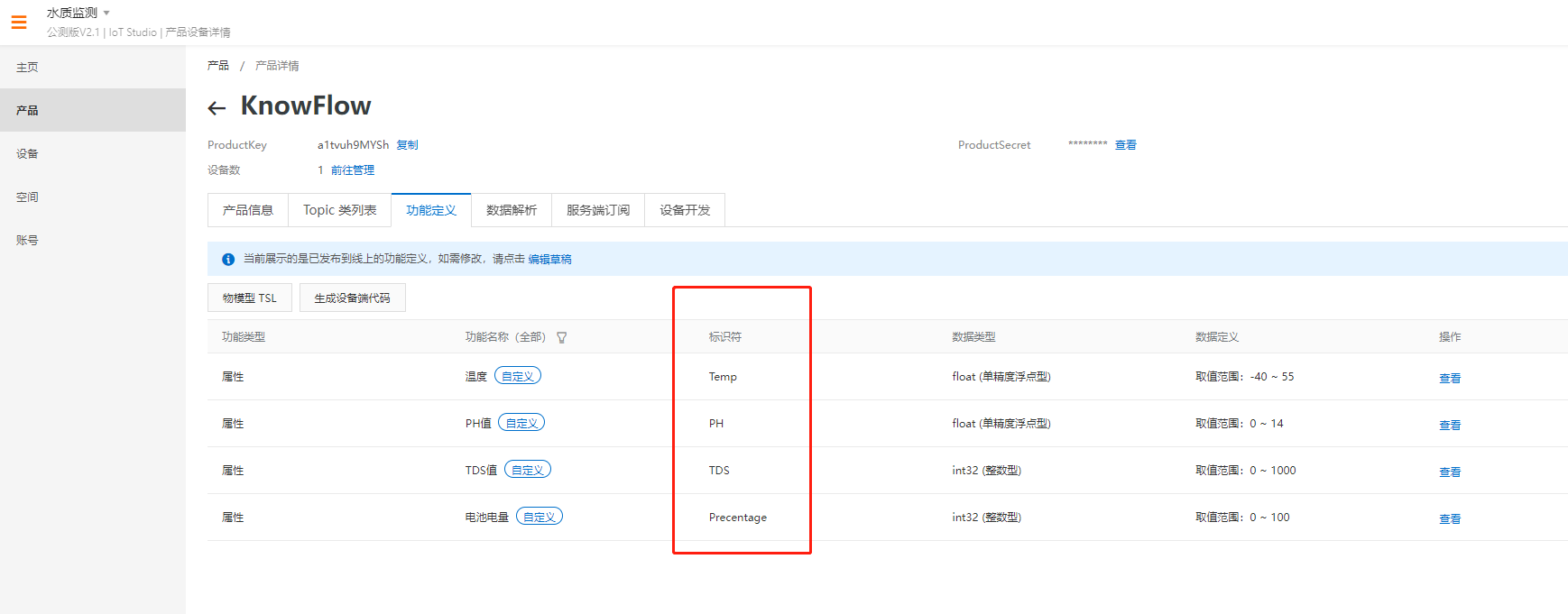
本次项目中,需要采集温度、pH以及TDS三种水质参数,另外还需要采集电池电量的百分比,所以我们需要创建四个自定义功能(物模型),相关设定参数按照下表填写:
| 序号 |
功能名称 |
标识符 |
数据类型 |
取值范围 |
步长 |
单位 |
| 1 |
温度 |
Temp |
float(单精度浮点型) |
-40~55 |
0.1 |
摄氏度 |
| 2 |
pH值 |
PH |
float(单精度浮点型) |
0~14 |
0.1 |
无 |
| 3 |
TDS值 |
Tds |
int32(整数型) |
0~1000 |
1 |
百万分率/ppm |
| 4 |
电池电量 |
Precentage |
int32(整数型) |
0~100 |
1 |
百分比/% |
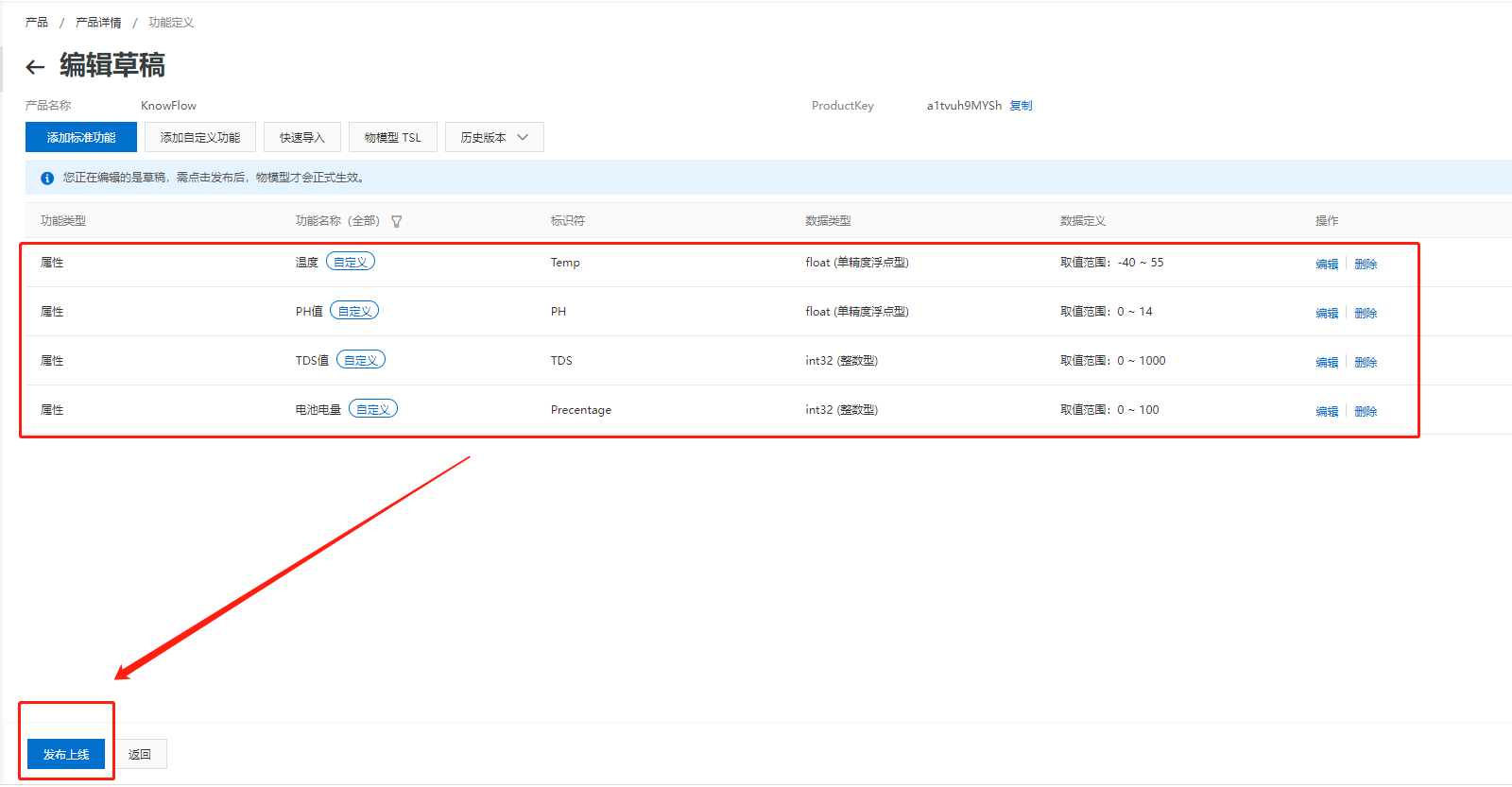
创建完成后,产品的功能定义界面效果如下图所示,点击发布上线。
新增设备
完成了产品的功能定义之后,接下来我们为产品建立一个设备,这样我们就可以将由TinkerNode搭建的水质监测设备连接到阿里云平台了。
在项目管理页面左侧的功能栏点击设备,在弹出的设备页面中选择添加设备,如下图所示。
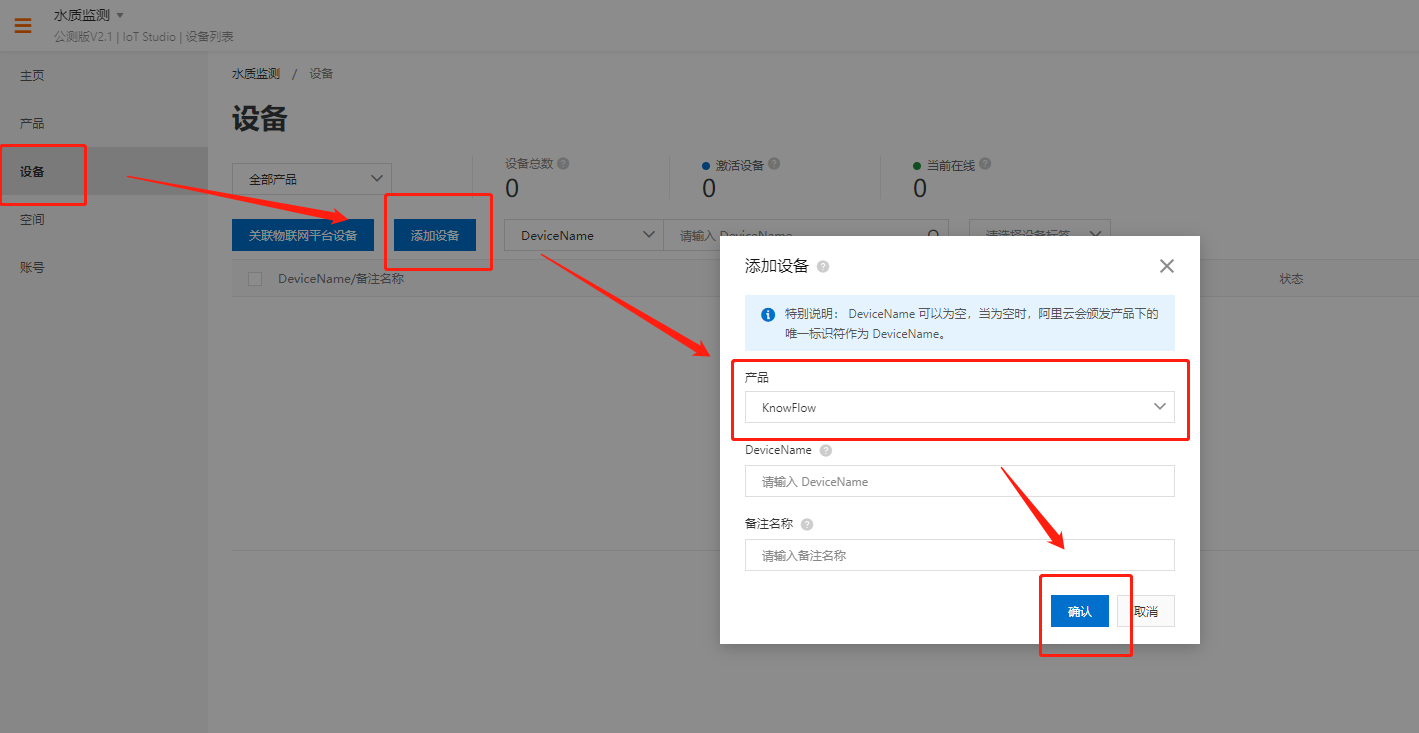
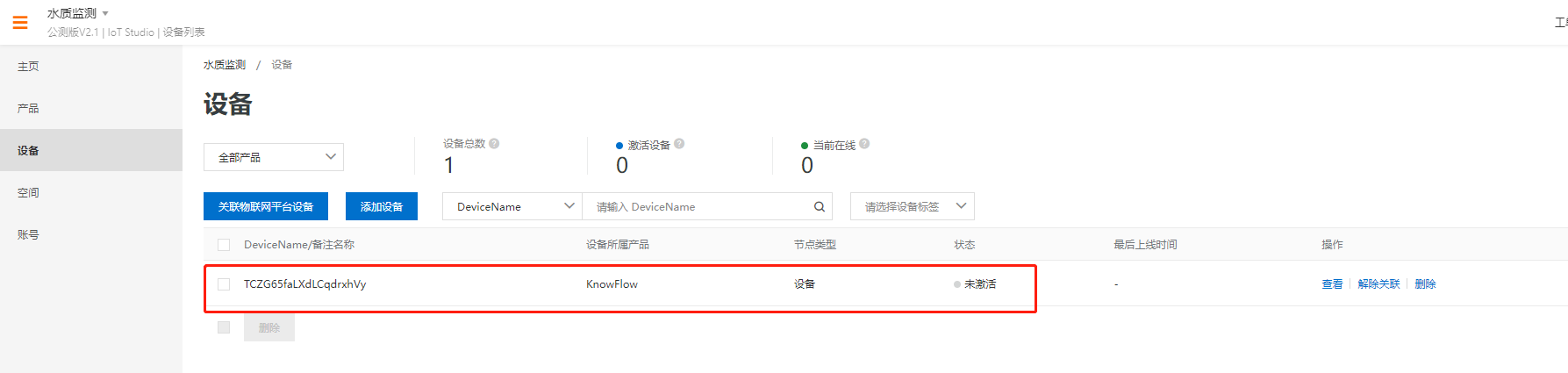
在弹出的窗口中,产品选择“KnowFlow”,点击确认,创建完成后如下图所示。
3. 硬件相关配置
硬件连接

按照上图进行硬件连接。Ps:如果该图看不清楚,可以到帖子最下方下载附件查看。
pH计校准
本次项目中使用到了Gravity:模拟pH计,按照产品wiki,我们需要进行校准操作。
pH使用注意事项:
请使用外接开关电源,使电压尽量接近+5.00V,电压越准,精度越高!
电极在每次连续使用前均需要使用标准缓冲溶液进行校正,为取得更正确的结果,环境温度最好在25℃左右,已知PH值要可靠,而且其PH值愈接近被测值愈好。如您测量的样品为酸性,请使用pH4.00的缓冲溶液对电极进行校正,如果您测量的样品为碱性,请使用pH9.18缓冲溶液对电极进行校正。分段进行校准,只是为了获得更好的精度。
pH电极每测一种pH不同的溶液,都需要使用清水清洗,建议使用去离子水清洗。
为保证测量精度,建议使用校准液对pH计定期校准,以防止出现较大误差。一般半年校准一次,如果测量的溶液中含有较多杂质,建议增加校准次数!
pH计的校准步骤:
(1)将各个设备按照图示方式连接,即:pH电极连接到pH meter电路板的BNC接口,然后用模拟连接线,将pH meter电路板连接到Arduino主控器的模拟口2。对Arduino主控器供电后,可以看到pH meter电路板的蓝色指示灯变亮。
(2)对Arduino主控器烧写校准样例代码。
#define SensorPin 0 //pH meter Analog output to Arduino Analog Input 0
#define Offset 0.00 //deviation compensate
#define LED 13
#define samplingInterval 20
#define printInterval 800
#define ArrayLenth 40 //times of collection
int pHArray[ArrayLenth]; //Store the average value of the sensor feedback
int pHArrayIndex=0;
void setup(void)
{
pinMode(LED,OUTPUT);
Serial.begin(9600);
Serial.println("pH meter experiment!"); //Test the serial monitor
}
void loop(void)
{
static unsigned long samplingTime = millis();
static unsigned long printTime = millis();
static float pHValue,voltage;
if(millis()-samplingTime > samplingInterval)
{
pHArray[pHArrayIndex++]=analogRead(SensorPin);
if(pHArrayIndex==ArrayLenth)pHArrayIndex=0;
voltage = avergearray(pHArray, ArrayLenth)*5.0/1024;
pHValue = 3.5*voltage+Offset;
samplingTime=millis();
}
if(millis() - printTime > printInterval) //Every 800 milliseconds, print a numerical, convert the state of the LED indicator
{
Serial.print("Voltage:");
Serial.print(voltage,2);
Serial.print(" pH value: ");
Serial.println(pHValue,2);
digitalWrite(LED,digitalRead(LED)^1);
printTime=millis();
}
}
double avergearray(int* arr, int number){
int i;
int max,min;
double avg;
long amount=0;
if(number<=0){
Serial.println("Error number for the array to avraging!/n");
return 0;
}
if(number<5){ //less than 5, calculated directly statistics
for(i=0;i<number;i++){
amount+=arr;
}
avg = amount/number;
return avg;
}else{
if(arr[0]<arr[1]){
min = arr[0];max=arr[1];
}
else{
min=arr[1];max=arr[0];
}
for(i=2;i<number;i++){
if(arr<min){
amount+=min; //arr<min
min=arr;
}else {
if(arr>max){
amount+=max; //arr>max
max=arr;
}else{
amount+=arr; //min<=arr<=max
}
}//if
}//for
avg = (double)amount/(number-2);
}//if
return avg;
}复制代码
(3)将pH电极插入到pH值为7.00的标准溶液中,或者直接短接BNC接口的两个输入,打开Arduino IDE的串口监视器,可以看到当前打印出的pH值,误差不会超过0.3。记录下此时打印的值,然后与7.00相比,记录此时的差值,在后续的步骤中,需要把差值修改到程序中的Offset处(差值 = 标准值(7.0) - 打印值)。比如,打印出的pH值为6.88,则差值为0.12,则在样例程序中把#define Offset 0.00改成#define Offset 0.12。
(4)将pH电极插入pH值为4.00的校准液中,等待一分钟后,调整增益电位器,使打印出的pH值尽量稳定在4.00左右。此时,酸性段校准已经完成,您可以测试酸性溶液的pH值。
注意:测量其他溶液时,必须清洗电极。
(5)依靠pH电极自身的线性特性,经过以上的校准,可以直接测量碱性溶液的pH值,但如果您想获得更好的精度,建议重新校准。碱性段校准采用pH值为9.18的标准液,同样是调节增益电位器,使之稳定在9.18左右。经过校准,此时您可以测量碱性溶液的pH值了。
代码调试
下载附件中的库文件,安装至Aruidno IDE中。点击查看如何安装库文件?
下载附件NB_Project2.ino,打开项目代码,根据阿里云的配置和pH计的校准参数,修改代码中对应的参数。
①阿里云相关配置
需要将阿里云中的配置信息,在代码中做对应的修改。
在设备页面查看设备证书信息,填写在代码中对应位置。

//配置证书信息
String ProductKey = "Your_Product_Key";
String ClientId = "12345";
String DeviceName = "Your_Device_Name";
String DeviceSecret = "Your_Device_Secret";复制代码
在产品页面查看功能标识符,填写在代码中对应位置。
//配置产品标识符
String TempIdentifier = "Your_Temp_Identifier";
String PHIdentifier = "Your_ph_Identifier";
String TDSIdentifier = "Your_TDS_Identifier";
String GaugeIdentifier = "Your_batGauge_Identifier";复制代码
在设备管理页面,查看物模型topic信息,填写在代码中对应位置。

//需要发布和订阅的TOPIC
const char * subTopic = "Your_sub_Topic";//****set
const char * pubTopic = "Your_pub_Topic";//******post复制代码
②ph计校准数据配置
将刚刚校准时记录的offset参数,填写至下列代码中。比如,打印出的pH值为6.88,则差值为0.12,则在样例程序中把#define Offset 0.00改成#define Offset 0.12。
#define Offset 0.00 //deviation compensate复制代码
该行代码位置如下图所示。

③低功耗唤醒时间配置
项目使用了低功耗的功能,可以通过调整代码中的参数,修改设备的唤醒时间。
//#define TIME_TO_SLEEP_SECOND 10 /* Time ESP32 will go to sleep (in seconds) */
#define TIME_TO_SLEEP_MINUTE 5 /* Time ESP32 will go to sleep (in mimutes) */复制代码
低功耗唤醒间隔设置有两种模式,分别是分钟设置和秒设置。样例中使用的是分钟模式,默认设定时间为5分钟。为了方便测试,大家可以任意修改。
该代码位置如下图所示。

全部配置完成后,将代码上传至TinkerNode物联网开发板中,就可以在阿里云平台上查看相应的数据信息了。

 硬件连接图.zip
硬件连接图.zip 编辑选择奖
编辑选择奖



 沪公网安备31011502402448
沪公网安备31011502402448
 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶






