|
11050| 0
|
[黑科技] 声音摩尔斯电码发送装置|DF创客周刊(第 20 期) |

|
社区公众号记录每周值得分享的创客相关内容,每周五发布~ 内容开源,欢迎投稿或推荐相关内容。 投稿邮箱:MakerCommunity@outlook.com 图片&视频 PCB礼物盒   一个PCB做的礼品盒,放在桌子上或者挂在圣诞树上都很好看。   教程链接:https://www.hackster.io/baldengineer/pcb-present-ornament-7f5c0b 圣诞之星 制作一个可以Wi-Fi控制的Neopixel 圣诞之星,可以通过手机来设置想要显示的颜色和效果。   教程链接:https://www.instructables.com/DIY-Wi-Fi-Controlled-NeoPixel-Christmas-Star/ Everything Presence One 海外KOL制作的Everything Presence One——一款用于智能家居的传感器。 它结合了毫米波传感器、运动传感器、光照度传感器、温湿度传感器,可以通过ESPHome直接与Home Assistant集成。     文档链接:https://everythingsmarthome.github.io/everything-presence-one/hardware-overview.html Sawppy漫游者火星车 Sawppy是一个模型,其布局和比例模仿了好奇号和毅力号火星车,成本在500美元左右。 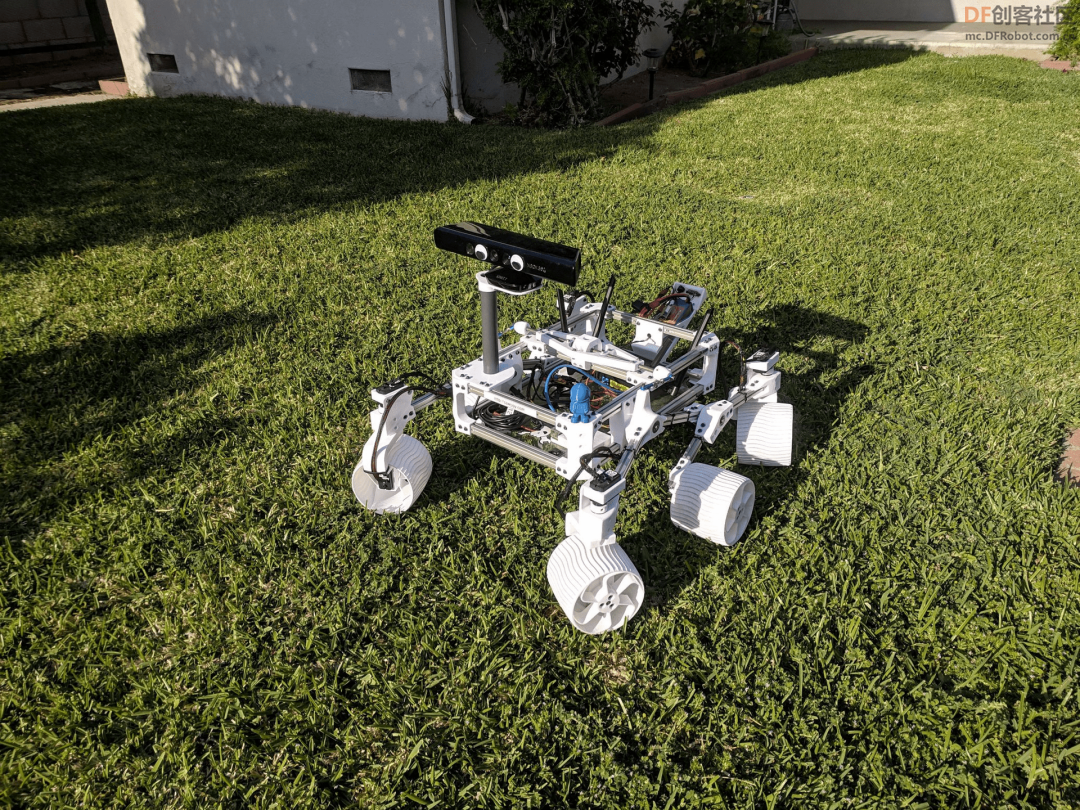 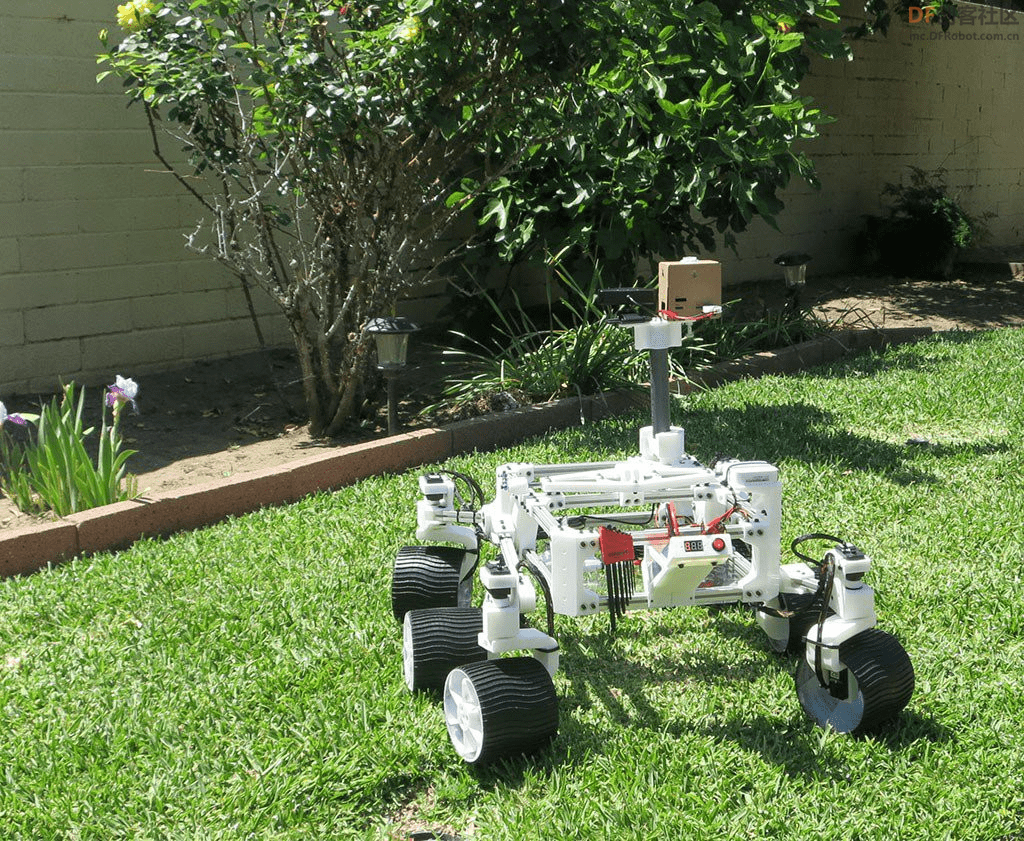 Sawppy漫游者的灵感来自于JPL的开源漫游者项目。Sawppy与JPL的灵感之间的大部分差异都是出于降低成本和复杂性的考虑。JPL的漫游车是为教育而设计的,由一个学校团队组装,为结构化的课程提供一个强大的基础。Sawppy更适合个人爱好者,乐于自己动手修修补补,并愿意为降低成本做出一些折衷。 教程链接:https://hackaday.io/project/158208-sawppy-the-rover FireBeetle 制作一个LED矩阵 社区的@zoologist 通过 FireBeetle ESP32 实现一个 8*16 的单色LED矩阵,可以在上面实现一些简单的图形和动画效果。  社区教程链接:https://mc.dfrobot.com.cn/thread-314865-1-1.html?fromuid=830836 FireBeetle 声音摩尔斯 通过BLE 蓝牙键盘输入,使用 DFRobot 的FireBeetle配合蜂鸣器实现声音摩尔斯码的发送。  社区的@zoologist 使用 DFRobot 的 FireBeetle ESP32 作为主控,通过BLE蓝牙键盘输入信息,输入的字符会显示在 OLED12864显示屏上,当用户输入回车时,程序将这个信息转化为摩尔斯电码然后通过板子上的蜂鸣器将这个信号以声音的形式发送出去。 通过手机上的MorseCode APP 将声音解码为字符。  教程链接:https://mc.dfrobot.com.cn/thread-314700-1-1.html?fromuid=830836 新闻&资讯 马斯克反悔:毫米波雷达重新上车,最快下个月就发布 纯视觉信徒马斯克,割掉特斯拉汽车上最后一颗雷达刚过去两个月—— 现在又反悔了。 根据特斯拉最新一份材料,最早明年1月中旬,一款新的雷达将重新上车。 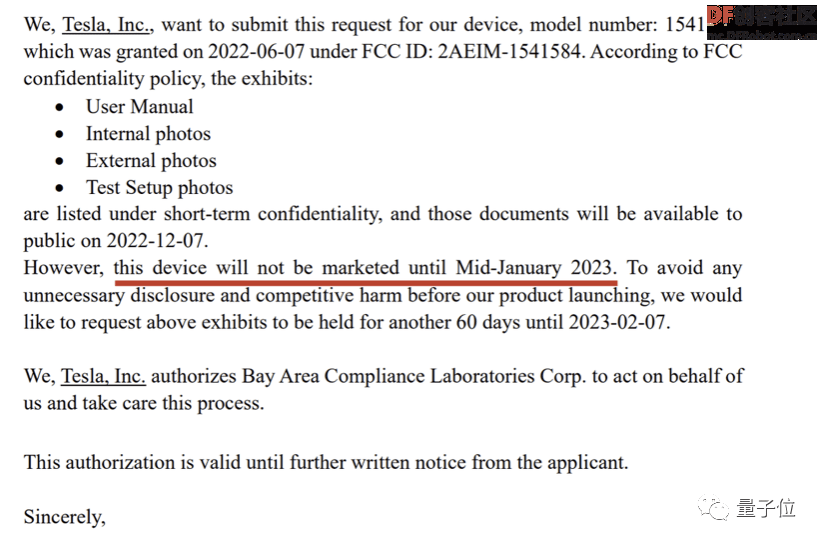 根据文件信息,这款雷达是一种非脉冲毫米波雷达,工作频率为76-77GHz,支持3种扫频模式。 最大扫频带宽为700MHz,最小为210MHz,帧周期约为67ms。 具体而言,它属于调频连续波雷达(FMCW)。 据悉就是以色列初创公司Arbe Robotics家的“Phoenix(凤凰)”的雷达。 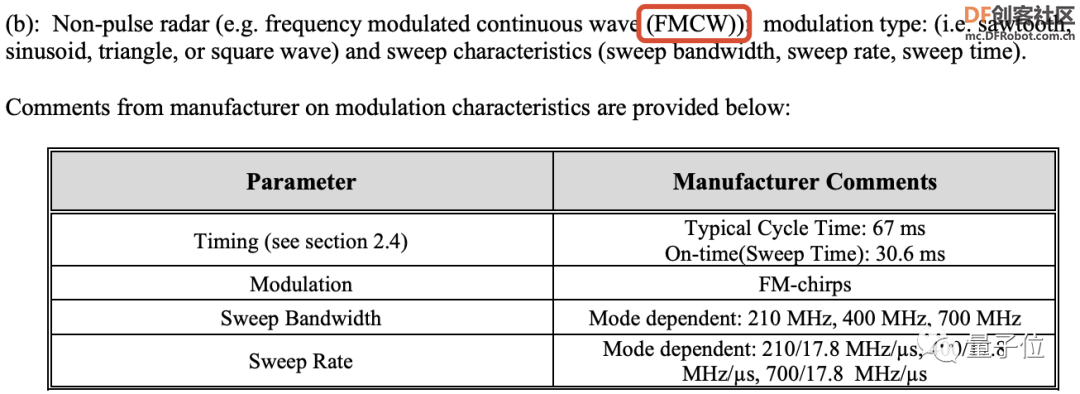 FMCW的优势是结构相对简单、容易实现、尺寸小、重量轻以及成本低。 同时,性能方面,它能够测量到非常小的目标范围(最小测量范围与传输波长相当)及其相对速度,没有高峰值功率脉冲辐射的安全性问题。 可以应用到道路车辆监测记录、汽车防撞、车流量检测、自动驾驶等领域,博世、大陆、德尔福、电装等汽车零部件供应商都已经掌握了FMCW雷达的核心技术。 不过功率方面,特斯拉基于FMCW的这款新雷达比“阉割”之间52mW的ARS-4B高了不少。 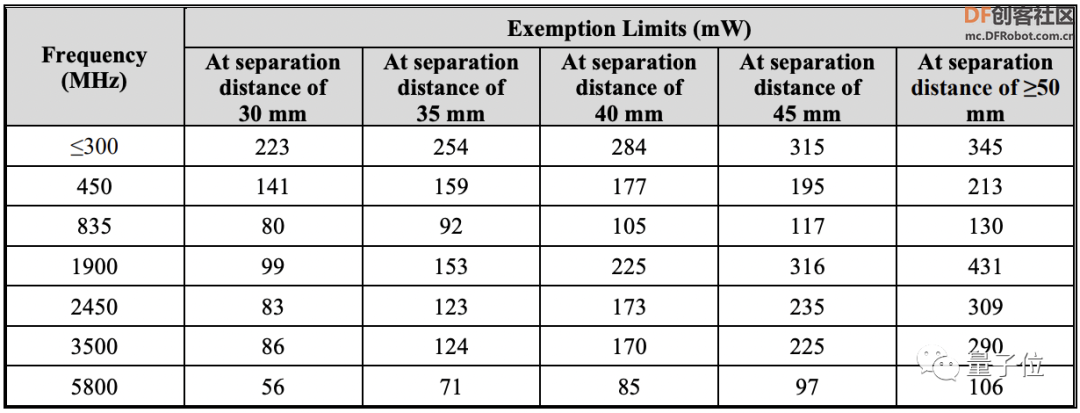 据悉,Arbe称自家的Phoenix雷达是实现真正道路安全(ADAS、L3和更高级别自动驾驶)和欧洲NCAP(欧盟新车安全评鉴协会)路线图的关键帮手。 因为它能够实现对行人、自行车和摩托车等小型实体的准确检测和跟踪,即使它们的一部分被其他车辆或静止物体遮挡,Phoenix也能持续感知到它们的方向和速度,提供不间断的报告。  具体参数上,Phoenix可以将特斯拉原有毫米波雷达的探测范围扩大约一倍,达到300米。(原来的ARS410射程为160米) 而它最主打的特性还是超高分辨率(1°azimuth 1.7° elevation)。  这正中马斯克下怀。 因为马斯克曾经说过,毫米波雷达也不是不行,高分辨率的其实可以胜过纯视觉方案。但可惜当时并没有这样满足马斯克需求的产品。 而除了超高分辨率,Phoenix的4D特性也是马斯克看重的一个点。比如最近他就透露了这样一个信息:
因此,综上来看,马斯克现在遇到了合适的毫米波雷达,不介意打破此前的决定,开始了“双向奔赴”。 来源:量子位 马斯克反悔:毫米波雷达重新上车,最快下个月就发布 周刊首发于DF创客社区 版权协议:WTFPL 投稿&推荐 社区公众号会坚持每周记录值得分享的创客相关内容,初步拟定每周五发布~ 文章全部开源,欢迎小伙伴们投稿或者推荐相关的内容。(至少包含一幅图、一句话和原文链接) 投稿邮箱:MakerCommunity@outlook.com 入选发布的小伙伴们,会收到社区的小礼物(《树莓派4与人工智能实战项目》、《Arduino与LabVIEW互动设计》书籍) 大家有什么想说的,都欢迎在留言区留言! 让我们一起努力,分享更多好玩的项目! |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 萌萌哒新人
萌萌哒新人
 宣传大使
宣传大使
 小蘑菇
小蘑菇
 ARD DAY
ARD DAY
 编辑选择奖
编辑选择奖
 摸鱼团员
摸鱼团员
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖






