社区公众号记录每周值得分享的创客相关内容,每周五发布~
欢迎投稿或推荐相关内容。
投稿邮箱:mailto:MakerCommunity@outlook.com
用真空吸力做的七段显示屏
七段显示屏见得多了,但用空气驱动的你见过吗?
这个项目的每一段都是一个硅胶膜腔体——抽真空时,正面的硅胶薄膜被吸入凹槽,段就"亮"了(其实是凹下去了,靠光影产生视觉对比);恢复常压,段就"灭"。没有 LED,没有电子墨水,纯物理变化。
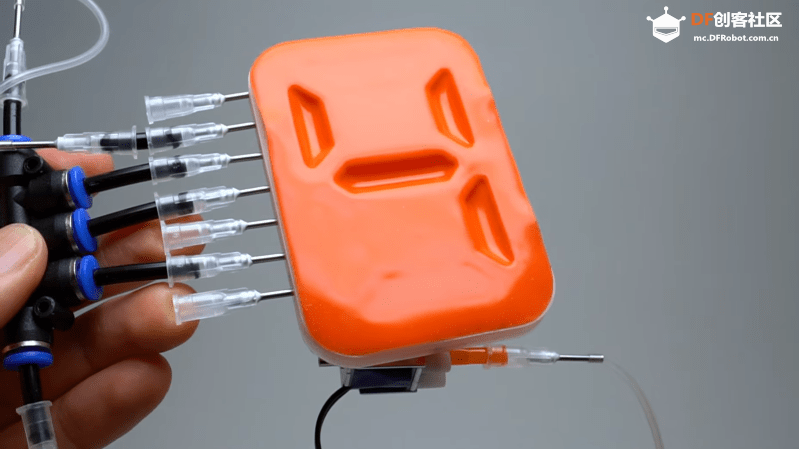
硅胶膜用 3D 打印模具浇铸而成,其余结构件也是 3D 打印的——为了保证气密性,打印时用玻璃底板来获得足够光滑的表面。显示屏做了四位七段,背后藏着一个 Arduino、一台小型真空泵和一组电磁阀。布线上用了七条数据线加四条控制线的矩阵方案,和传统数码管的驱动逻辑一样,只不过信号从电变成了气。
更巧妙的是锁存机制:每段腔体内有一个真空控制的开关,抽一次就能保持状态,不需要持续供气。整个时钟运行时几乎没有声音。这种"用非常规方式实现常规功能"的项目,做出来的效果既复古又前卫。
来源:https://hackaday.com/2026/04/11/a-suction-driven-seven-segment-display/
2.7 米长的 3D 打印 RC 潜艇,差点没浮上来
作者在 ProjectAir 频道展示了他的最新作品:一台 2.7 米长的遥控潜艇,大部分外壳和结构件都是 3D 打印的。问题是——3D 打印件在水下会渗水。
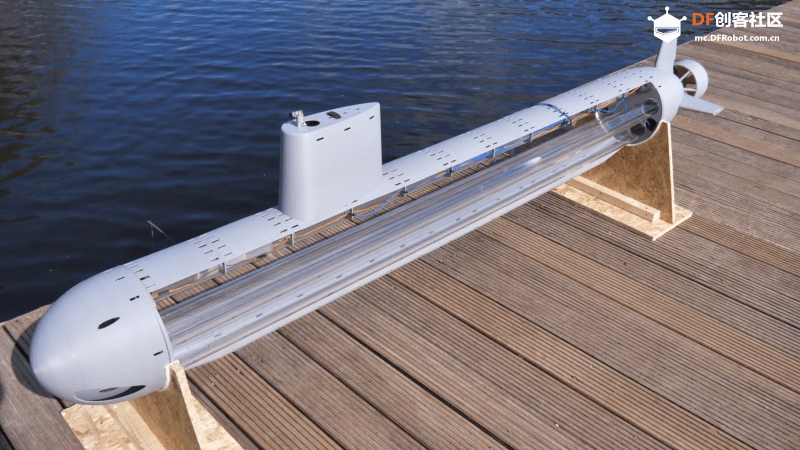
FDM 打印件的填充结构在常压下防水没问题,但潜到一定深度后,水压把水挤进了填充层的微小空隙。潜艇越潜越重,到后来几乎不愿意再浮上来。好在最终还是捞了回来,但这次经历让他重新审视了整个防水方案。
潜艇的工程细节不少:压载系统用大号注射器配丝杠和线性电位器做成,兼容标准 RC 遥控器;舵面和螺旋桨走舵机控制;舵机密封后灌油防水,其他暴露在外的电子元件要么灌环氧要么涂防水涂层。控制信号通过一个浮标天线接收——浮标用缆绳拴在潜艇上,浮在水面保持通信。
这个项目的价值不只是"做了个大家伙",而是完整记录了 3D 打印件在水压环境下的失效模式和应对思路。对于想做水下项目的人来说,这些坑早踩比晚踩好。
来源:https://hackaday.com/2026/04/13/3d-printed-parts-nearly-sink-rc-submarine/
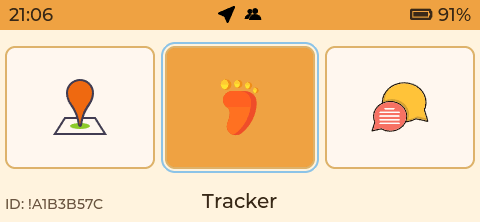
Trail Mate:没有信号的地方,ESP32 也能让你保持联络
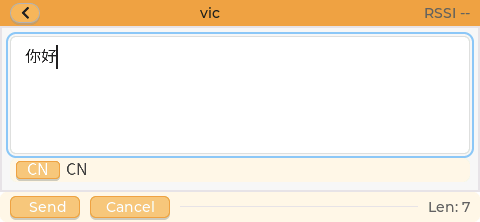
户外徒步、骑行、应急救援——这些场景的共同点是没有手机信号。Trail Mate 是一个面向 ESP32 手持设备的开源固件,把 Meshtastic 和 MeshCore 两套 LoRa mesh 协议整合到了一起,让你在没有任何网络基础设施的情况下实现 GPS 定位、文字通讯和团队态势感知。
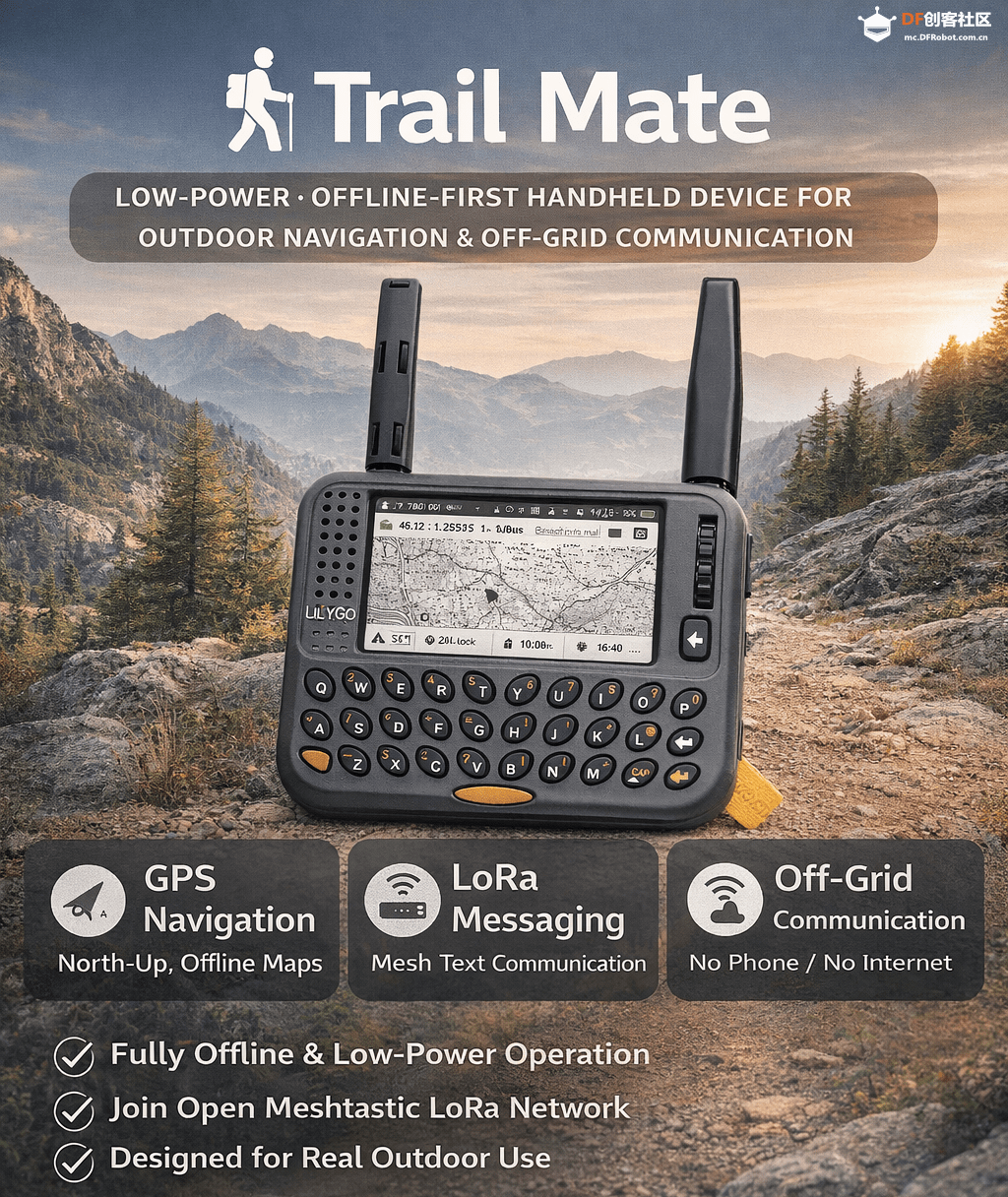
支持的硬件包括 LILYGO T-LoRa Pager 和 M5Stack Tab5 这类自带 LoRa 模块的 ESP32 手持设备。界面上做了四个核心功能:GPS 地图(固定北朝上)、LoRa 聊天(同时兼容 Meshtastic 和 MeshCore 网络)、团队追踪、和系统工具。聊天支持中英文输入,还能通过蓝牙连手机端的 companion app。
比较有意思的是"团队模式"——几个人在近距离通过 ESP-NOW 配对交换密钥,之后所有团队通信走 LoRa,加密且不依赖任何服务器。
另一个细节:这个项目的代码声称是 100% 由 AI 在人类指导下生成的,作者把它定位成"人机协作做真实工程系统"的长期实验。不管你怎么看这个说法,最终产物确实能用。
来源:https://github.com/vicliu624/trail-mate
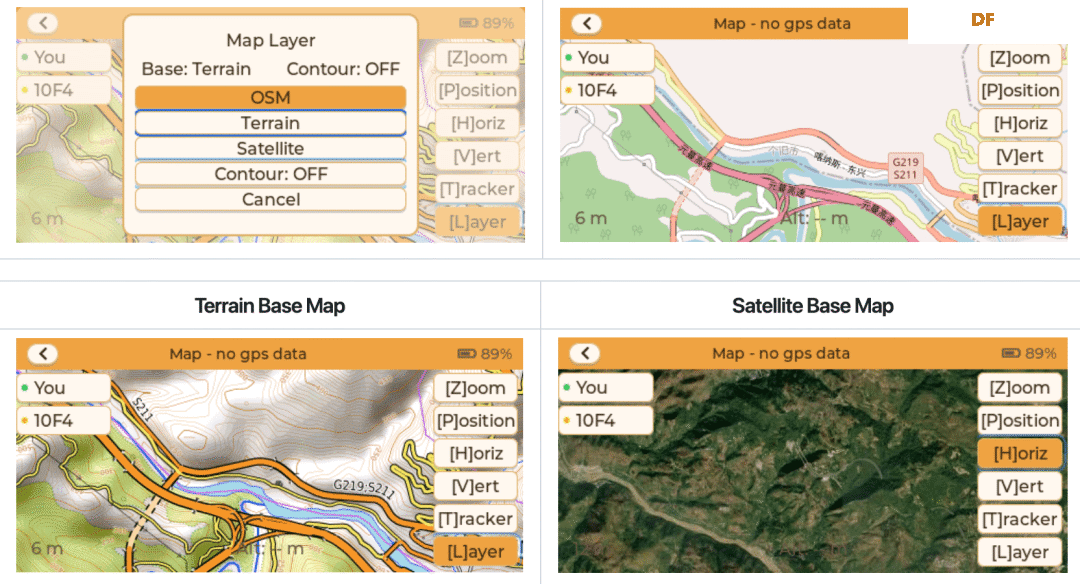
1 美元的开发板,BeagleBoard 说这价格能撑十年
BeagleBoard 基金会上周发布了 BeagleConnect Zepto,一块售价 1 美元的开源开发板。主控是德州仪器 MSPM0L1117——一颗 Cortex-M0+,32MHz,128KB Flash,16KB RAM。板子上有 mikroBUS 兼容排针、两个 Qwiic 接口、TAG-CONNECT JTAG 调试口、一颗 RGB LED,还有复位和 Boot 按钮。
1 美元这个定价不是亏本促销。BeagleBoard 明确说过,这个价格让芯片厂、贴片厂和分销商都能有合理利润,而且能维持十年以上不涨价。能做到这一点,靠的是芯片选型——MSPM0L1117 本身就是面向大批量消费电子的低成本料,加上 PCB 设计极简,BOM 成本压得很低。
固件方面支持 Zephyr SDK,有基于 MCUBOOT 的 USB 引导程序(号称很难刷成砖),还能通过 Greybus 协议把 mikroBUS 外设直接暴露给 Linux 主机。首批量产预计今年夏末出货,已经有早期测试者拿到了样品。对于需要大量低成本节点的 IoT 项目——比如传感器网络、教学套件、或者工业数据采集——这块板子可能会成为新的基准线。
来源:https://www.beagleboard.org/blog/2026-04-17-introducing-a-1-computer
Voron 社区做了台开源 CNC 铣床
Voron Design 在 3D 打印社区的口碑不用多说——他们的 CoreXY 打印机方案(Trident、2.4)是很多进阶玩家的首选。现在他们正式发布了 Cascade,一台桌面级 CNC 铣床,设计思路和他们做打印机一脉相承:铝型材框架 + 3D 打印连接件,龙门式结构,全部开源。
Cascade 定位是"轻型桌面 CNC",能铣木材、塑料和 PCB,铝件也能加工但需要保守的切削策略——毕竟 3D 打印件的刚性摆在那里。主轴推荐 G-Penny 1.5kW 24000RPM ER16,控制方案有两套可选:Expatria FlexiHAL 或 BTT Scylla CNC 板。
做 3D 打印机的团队来做 CNC,逻辑上说得通——两者在运动控制、框架设计、固件开发上有大量重叠。Voron 社区的优势是完善的文档和活跃的用户群,这对 CNC 这种调试周期长的项目来说很重要。如果你已经有 Voron 打印机的搭建经验,上手 Cascade 的学习曲线会短很多。
来源:https://github.com/VoronDesign/Voron-Cascade
CageMaker:不想手动建模机架支架?输入尺寸就行
家里搞了个小机柜放路由器、NAS、交换机,但这些设备尺寸各异,没有标准的机架耳朵,只能堆着放。CageMaker 是 [WebMaka] 写的一个参数化 OpenSCAD 脚本,专门解决这个问题:输入设备的长宽高,调几个参数,就能生成一个适配的 3D 打印机架支架 STL 文件。
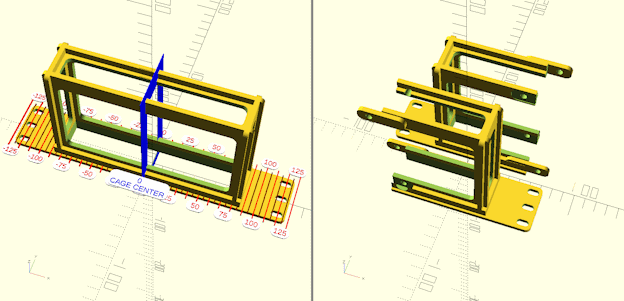

脚本考虑了不少实际问题。悬臂结构通过支撑几何体加固,重的设备可以加厚面板或增加加强筋。最新版本还能生成配套的后支撑笼——固定在后导轨上,和前面的设备笼卡扣连接,形成梯形结构抵抗重力。整套设计是参数化的,改个数字就能适配不同尺寸。
更方便的是,现在不用装 OpenSCAD 也能用——项目移植到了浏览器版的 OpenSCAD Playground,打开网页就能操作,直接导出 STL。对于折腾 homelab 的人来说,这个工具能省掉大量重复建模的时间。
来源:https://hackaday.com/2026/04/19/rack-cage-generator-gets-your-gear-mounted/




 沪公网安备31011502402448
沪公网安备31011502402448
 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 萌萌哒新人
萌萌哒新人
 宣传大使
宣传大使
 小蘑菇
小蘑菇
 ARD DAY
ARD DAY
 编辑选择奖
编辑选择奖
 摸鱼团员
摸鱼团员
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖






