|
22910| 11
|
[ESP8266/ESP32] 基于ESP32-S3做了一个万能遥控器 |

基于ESP32-S3做一个万能的遥控器,作为以后各种RC模型,机器人的通用控制方案。 还可以蓝牙连接电脑玩游戏,或者在遥控器上玩自己编写的游戏。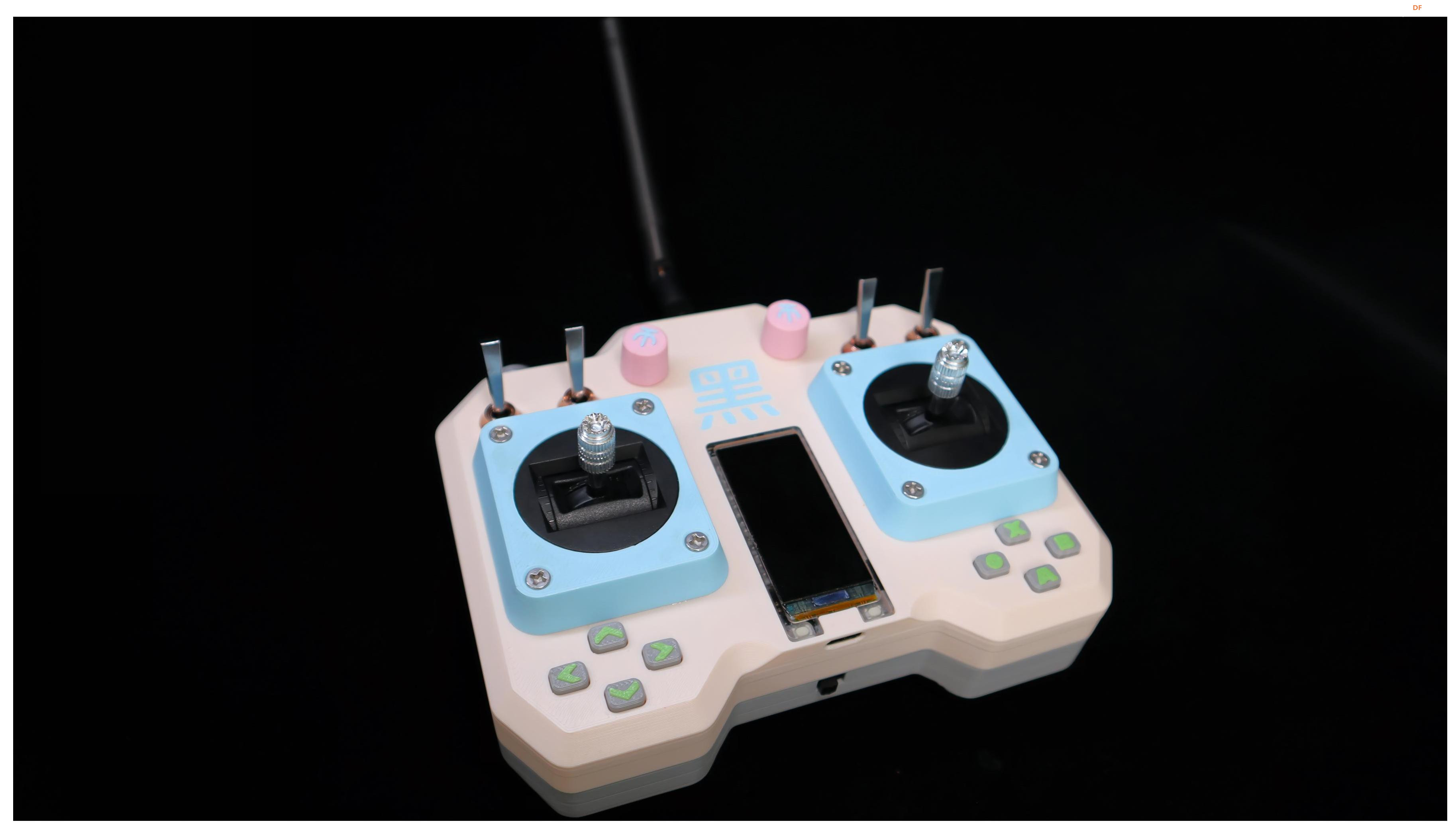 先上视频: 项目说明在我们玩各种RC模型,机器人或其它玩具时,它们都各有各的遥控器,很多很混乱,于是我就想做个通用的多功能遥控器。 不但可以控制众多设备,还可以通过蓝牙连接电脑,当做蓝牙手柄玩3A游戏,甚至编写一些小游戏遥控器本机上玩。 实现“一控在手,天下我有”的优雅! 项目功能
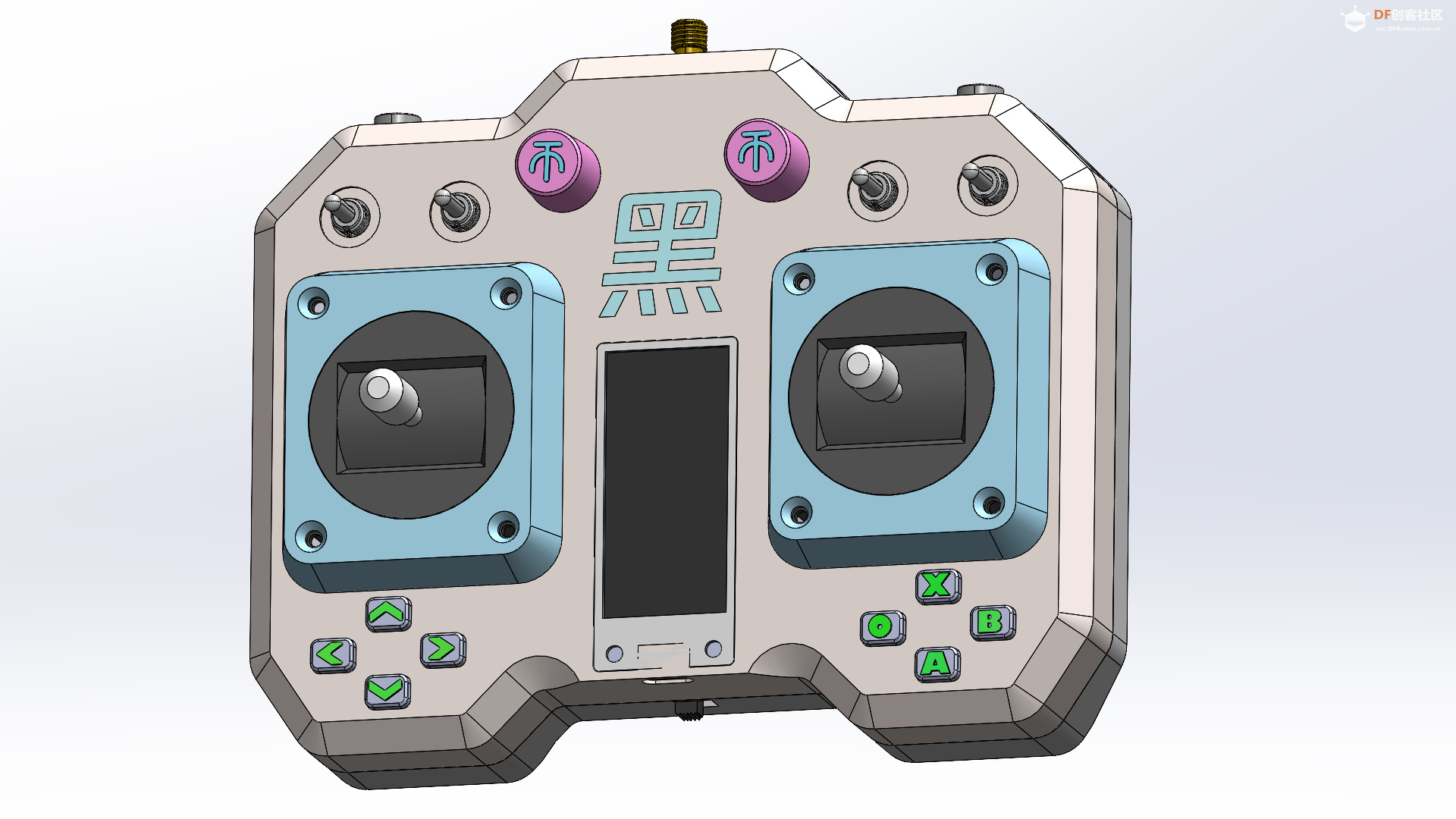
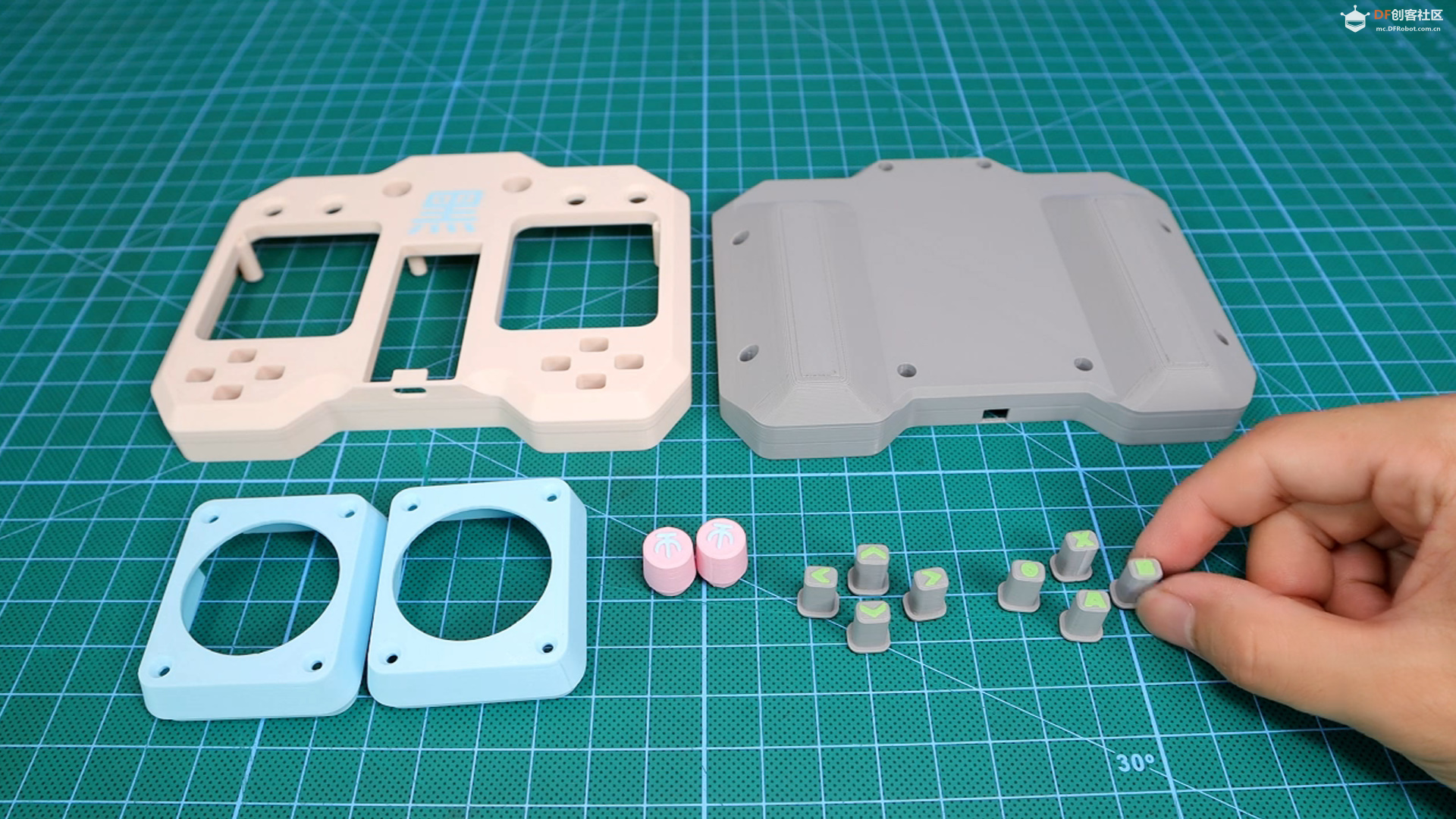
设计原理遥控器的工作原理很简单,就是不断的读取各个按键以及摇杆的状态,将按键值和摇杆的模拟值组合成一个自己设计的结构体,通过nRF24L01将这些数据发送给接收端,从机收到后解析出各个数据,并以此做出响应。 外壳设计外壳的要求就3点
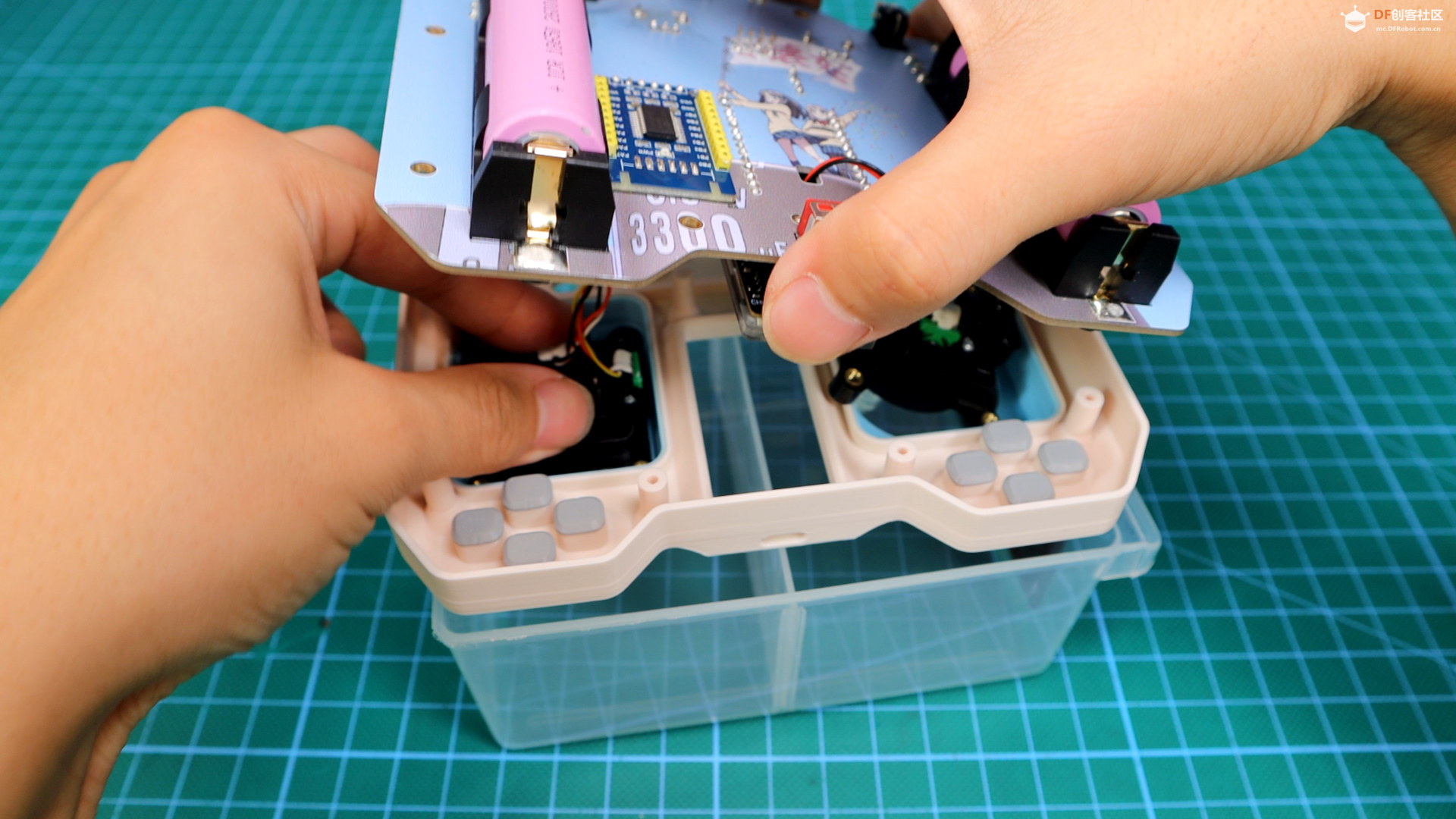
 制作过程
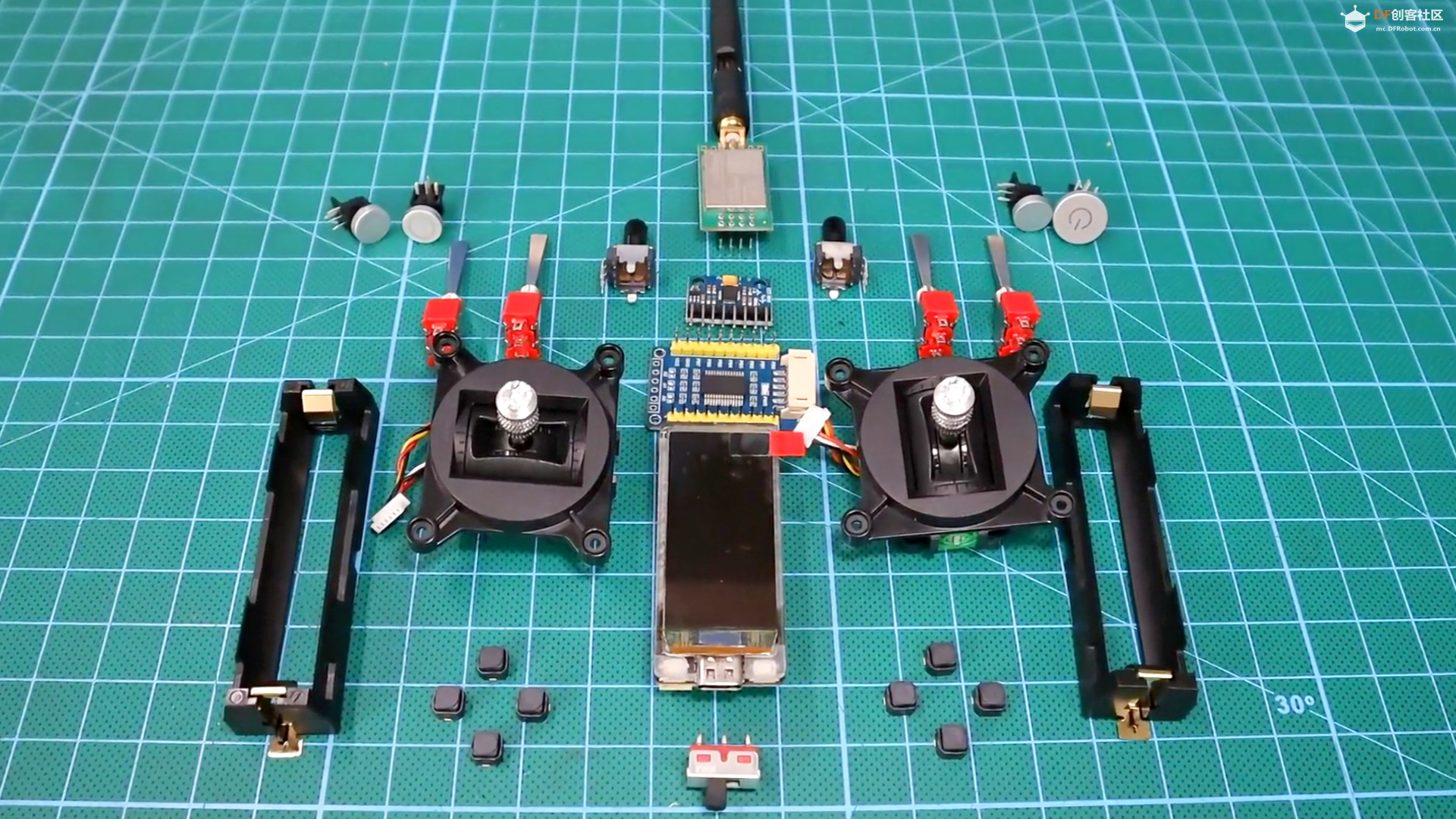
并把开发板和电池装到板子上,通过中间的孔,用线将开发板和PCB的电源连接起来 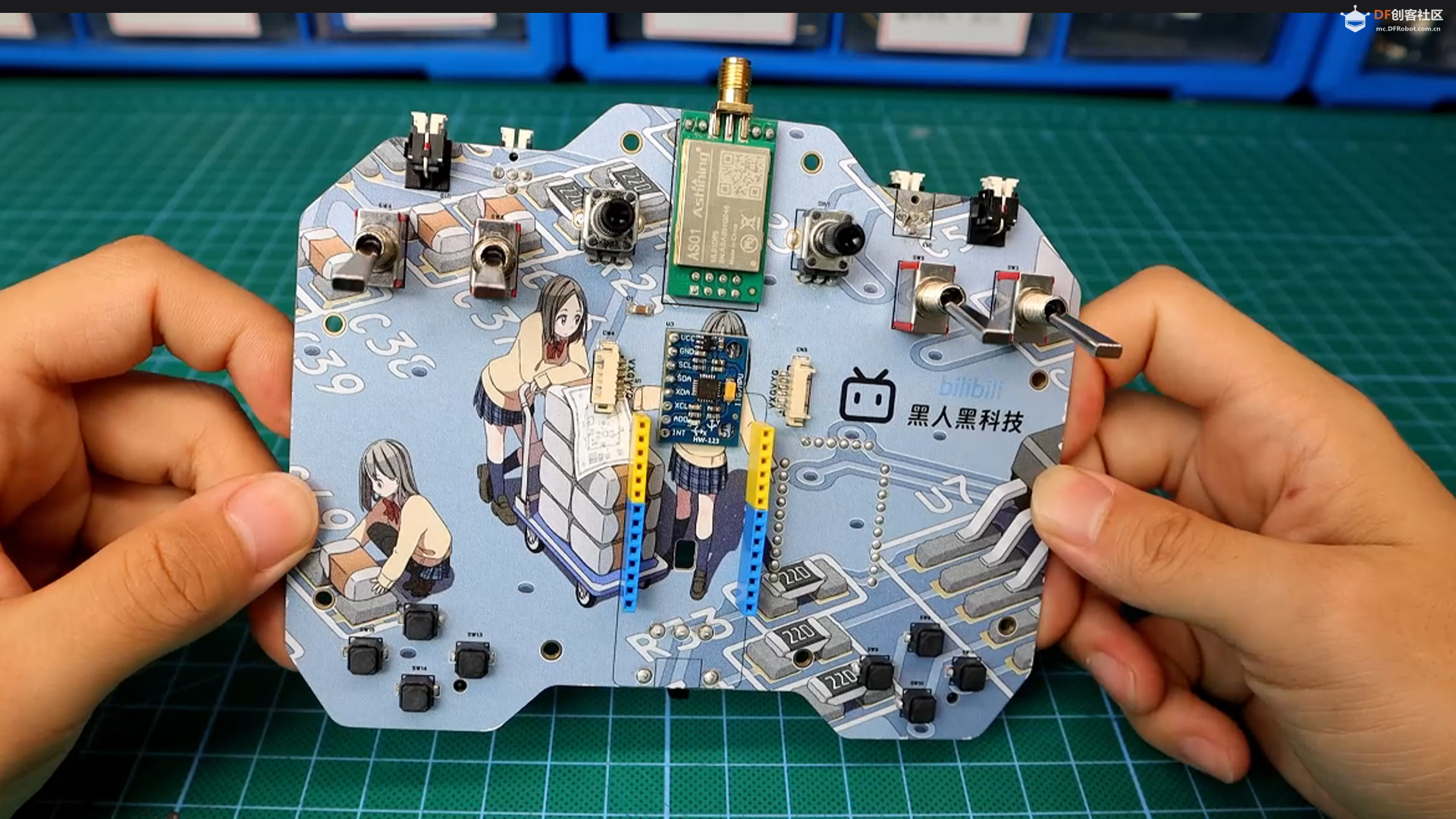 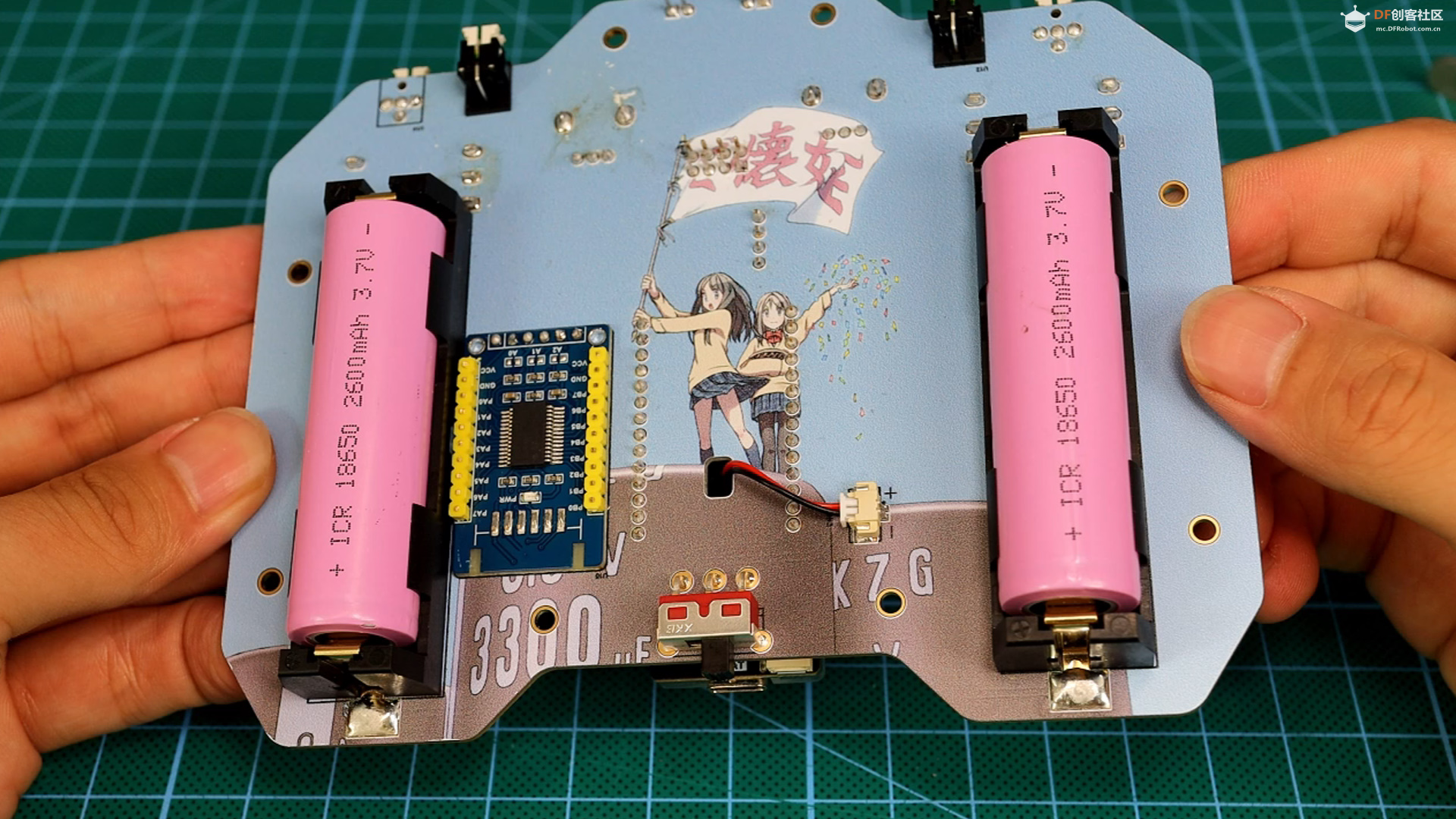
 遥控器测试代码原理就是不断地轮询所有按键,然后将按键状态显示到屏幕上。 编程基于Arduino环境,图形库使用的是TFT_eSPI,详细代码请看附件。 实际测试效果你可能会纳闷为啥在下边的测试视频中,小屏幕是朝下的。 具体情况请看视频: 菜单系统结构 一二级菜单预览一级菜单:  部分二级菜单:    菜单和遥控效果测试我用了一直之前的履带底盘进行了测试,效果不错。 详情请看B站视频。  菜单源码和图标完整源码和图标请见附件。 设计图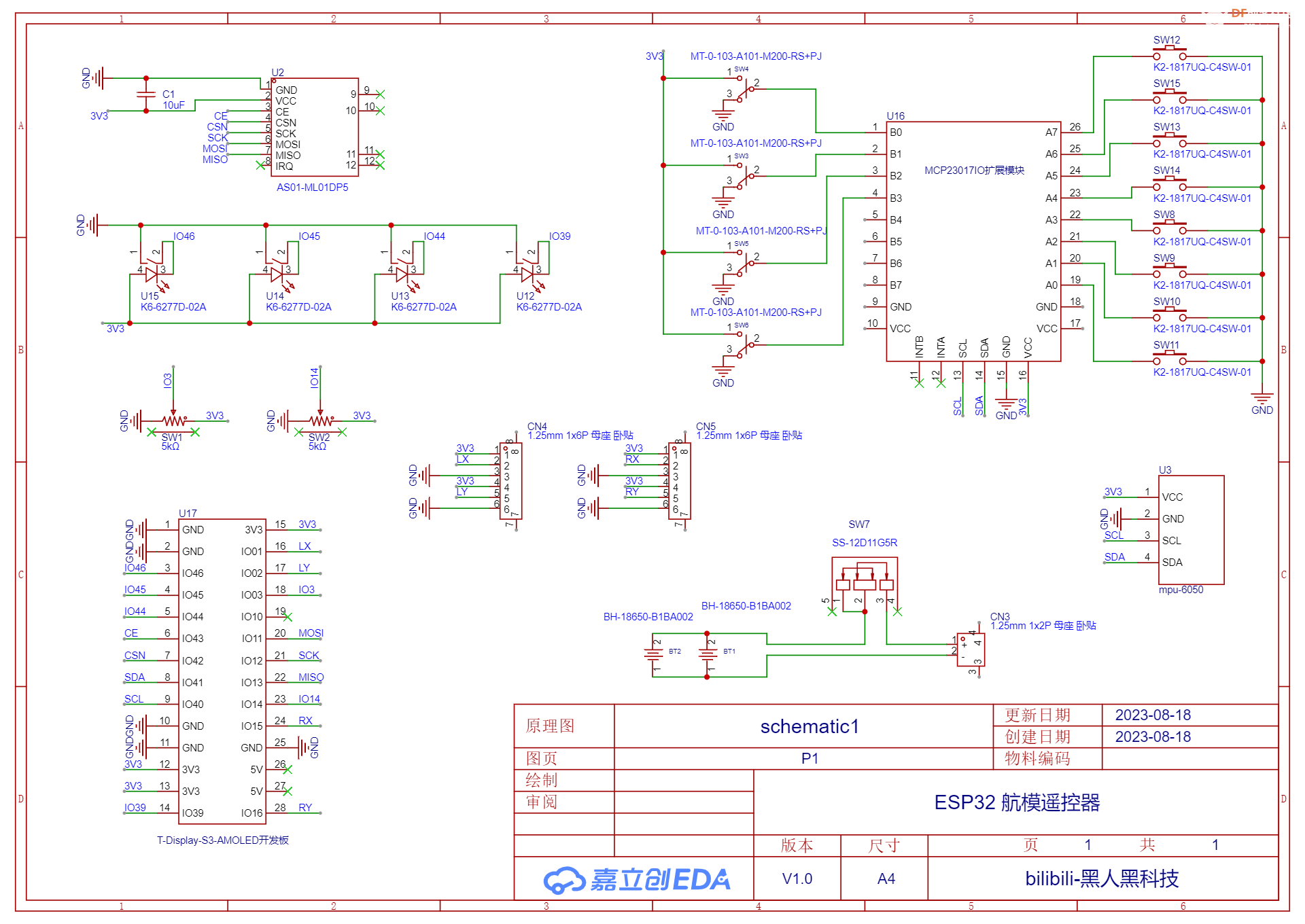 作者:黑人黑科技 |
|
我去,好牛逼 我已经是老粉丝了 最先看到的是b站视频 然后才看到了遥控器的《无线电》刊文和df论坛帖子  |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed



 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶










