|
8143| 2
|
[ESP8266/ESP32] 基于ESP32的四足机器狗 |

做了一个基于ESP32的四足机器狗,主控采用 ESP32-S ,板上集成了单线串口的转换电路(驱动电机),引出了串口和引脚作扩展,给大家做个参考! 直接上视频: 接着上图: 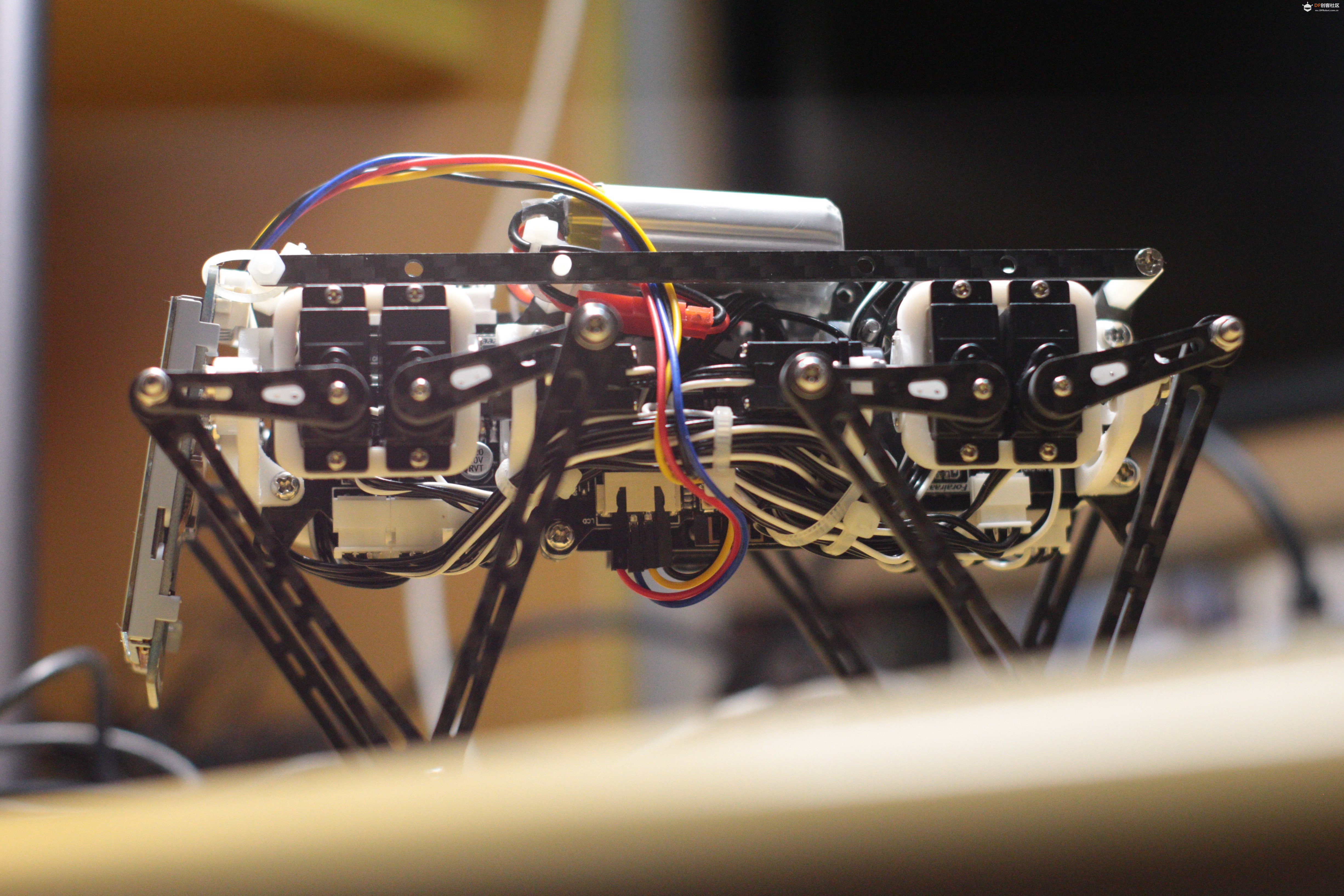 动力源为总线舵机驱动(SCS0009),组成12自由度(目前源码中只使用了8自由度) 机构第一次学着玩,开放式结构,结果不太理想:空间小,不好维护,怕水怕尘.... 而且电路板得迁就结构,不好迭代 下版本要强推模块化~~(怕了怕了) 美背~  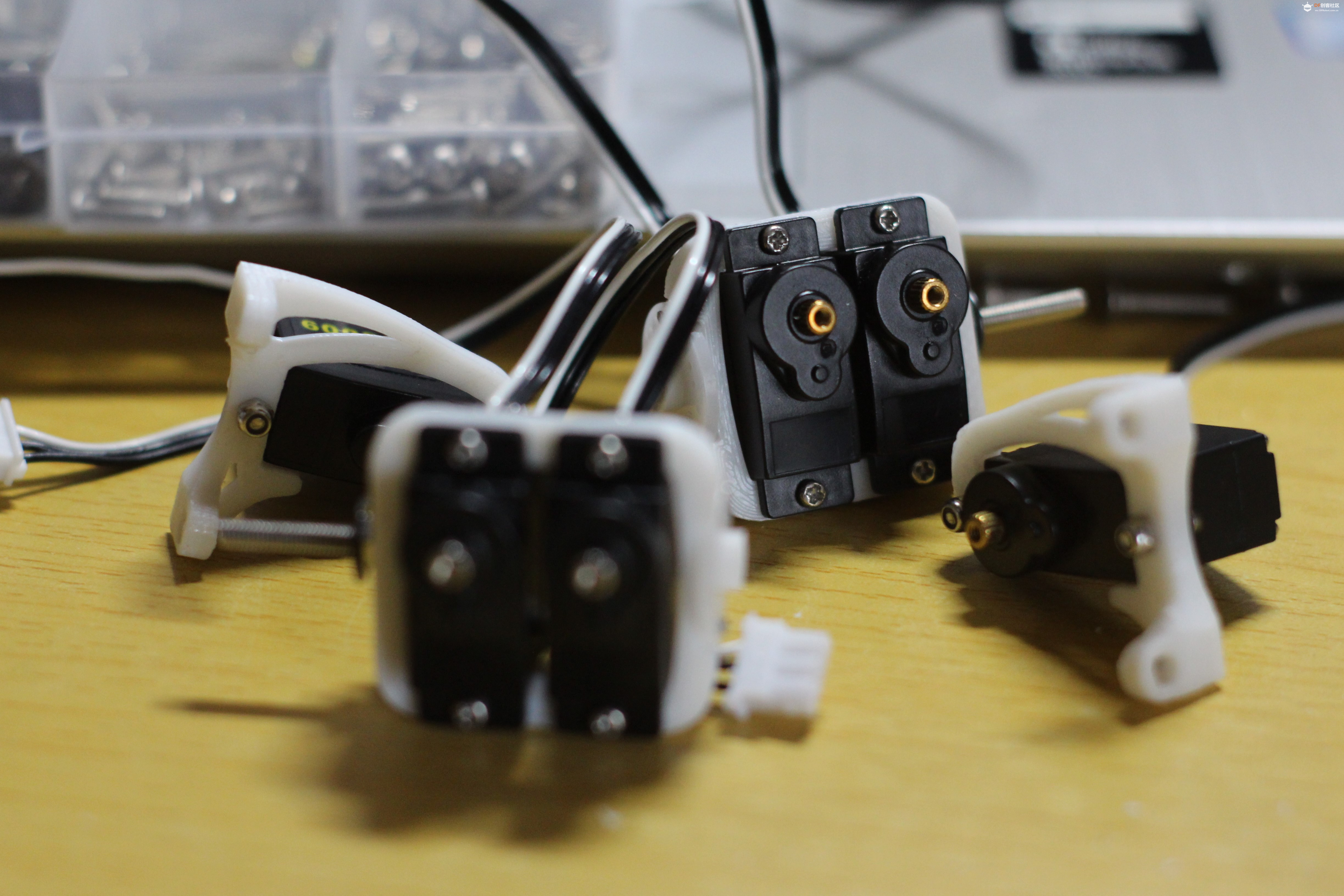  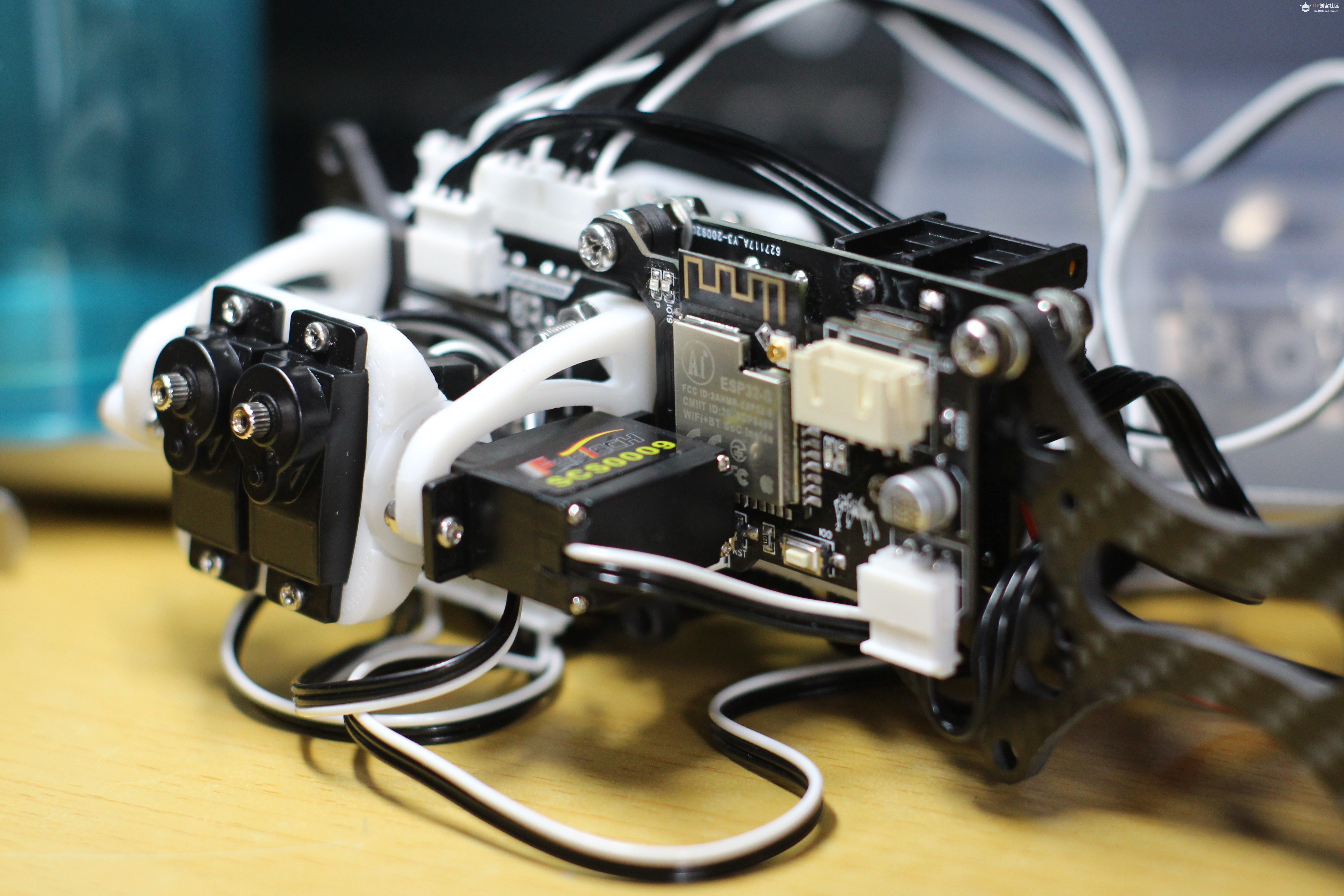 主控采用 ESP32-S ,板上集成了单线串口的转换电路(驱动电机),引出了串口和引脚作扩展(但结构导致有点舒展不开~) 当然少不了 Type-C(年轻人的执着)转 TTL 作烧写和通讯,但没弄自动下载~  为了节省体积,每个舵机单独一颗7805稳压供电~ 然后电源及通讯总线汇总到电源走线板,再连接主板~ 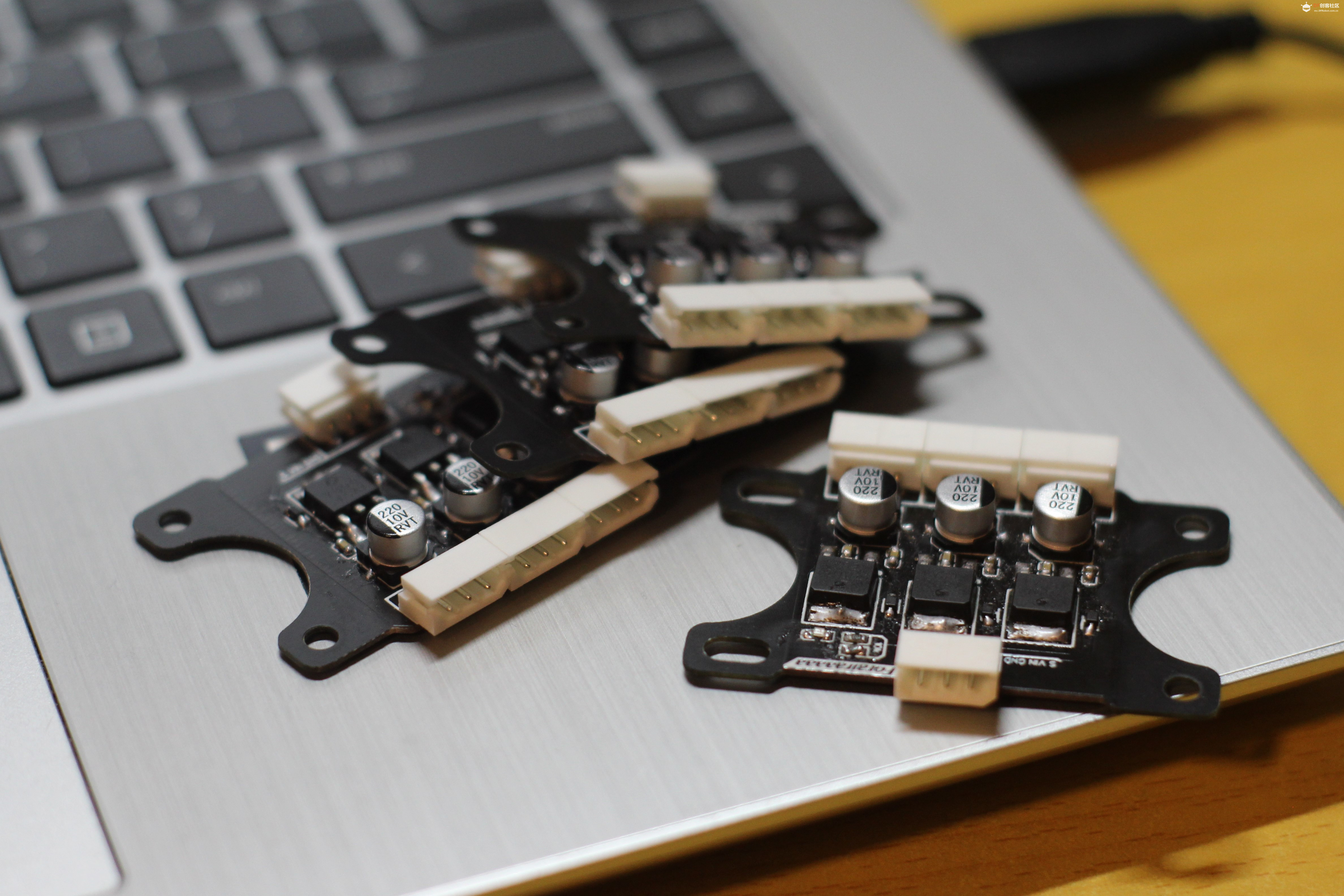  理线也够痛苦的~~ 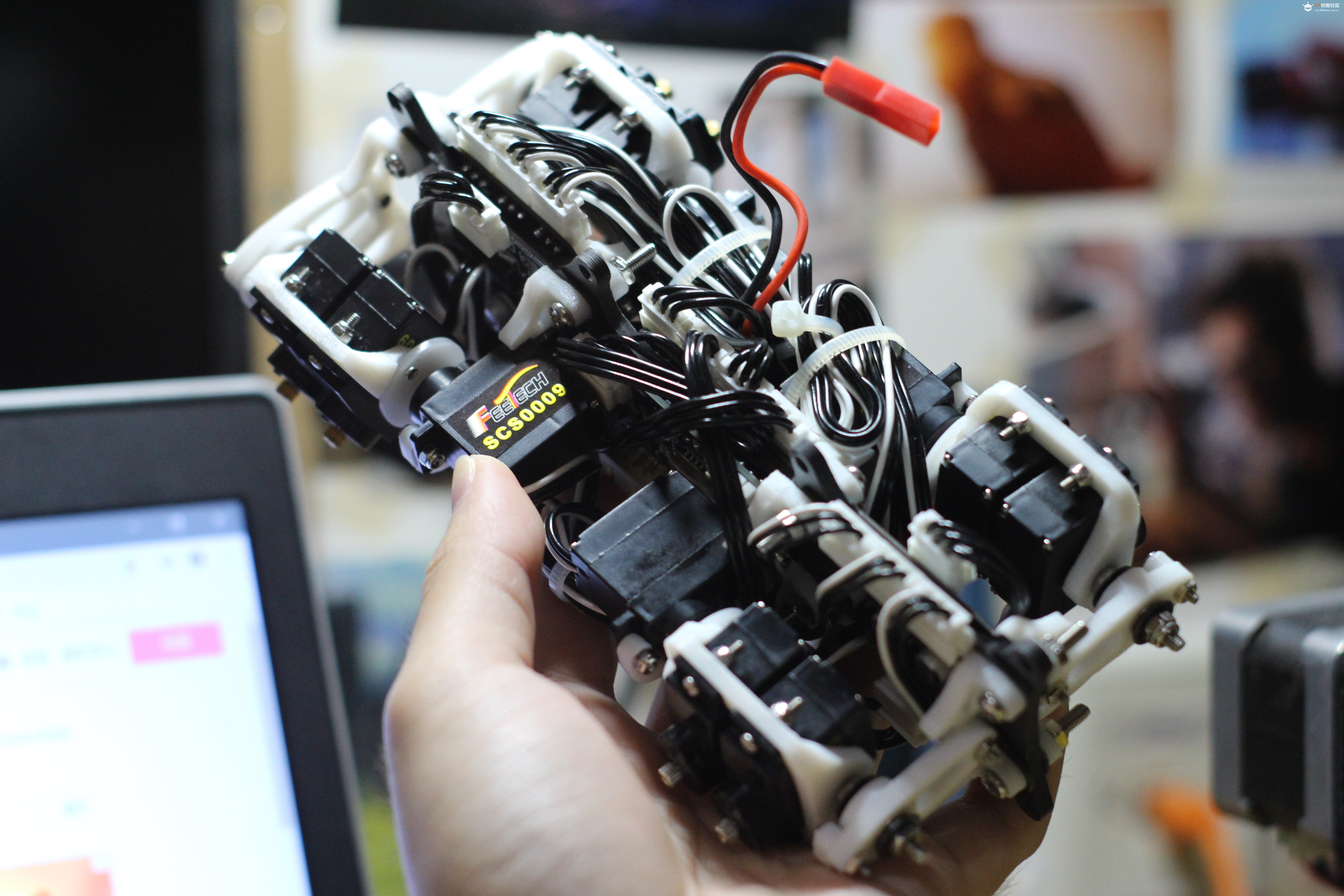 也算给大家做个参考避坑~~ 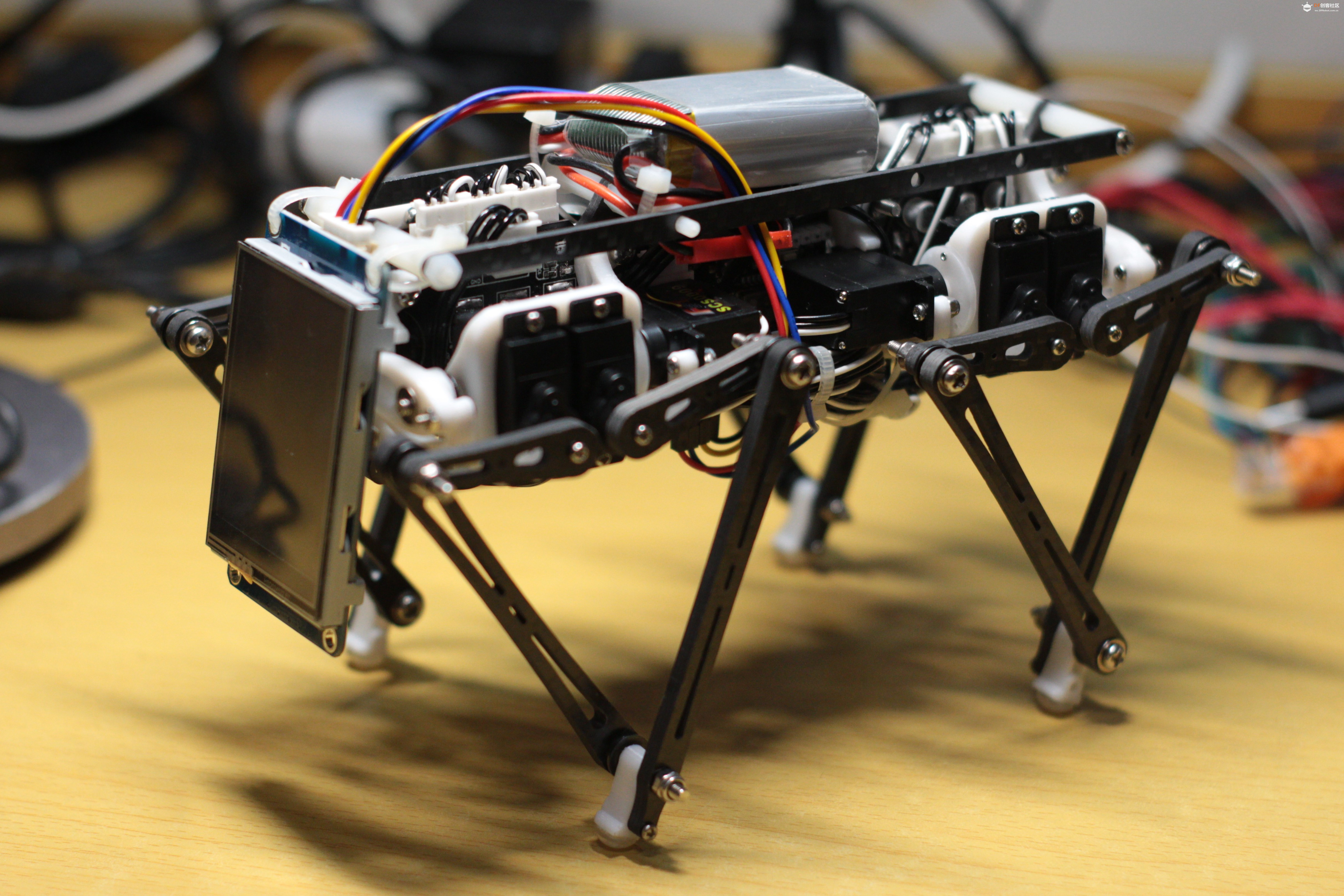 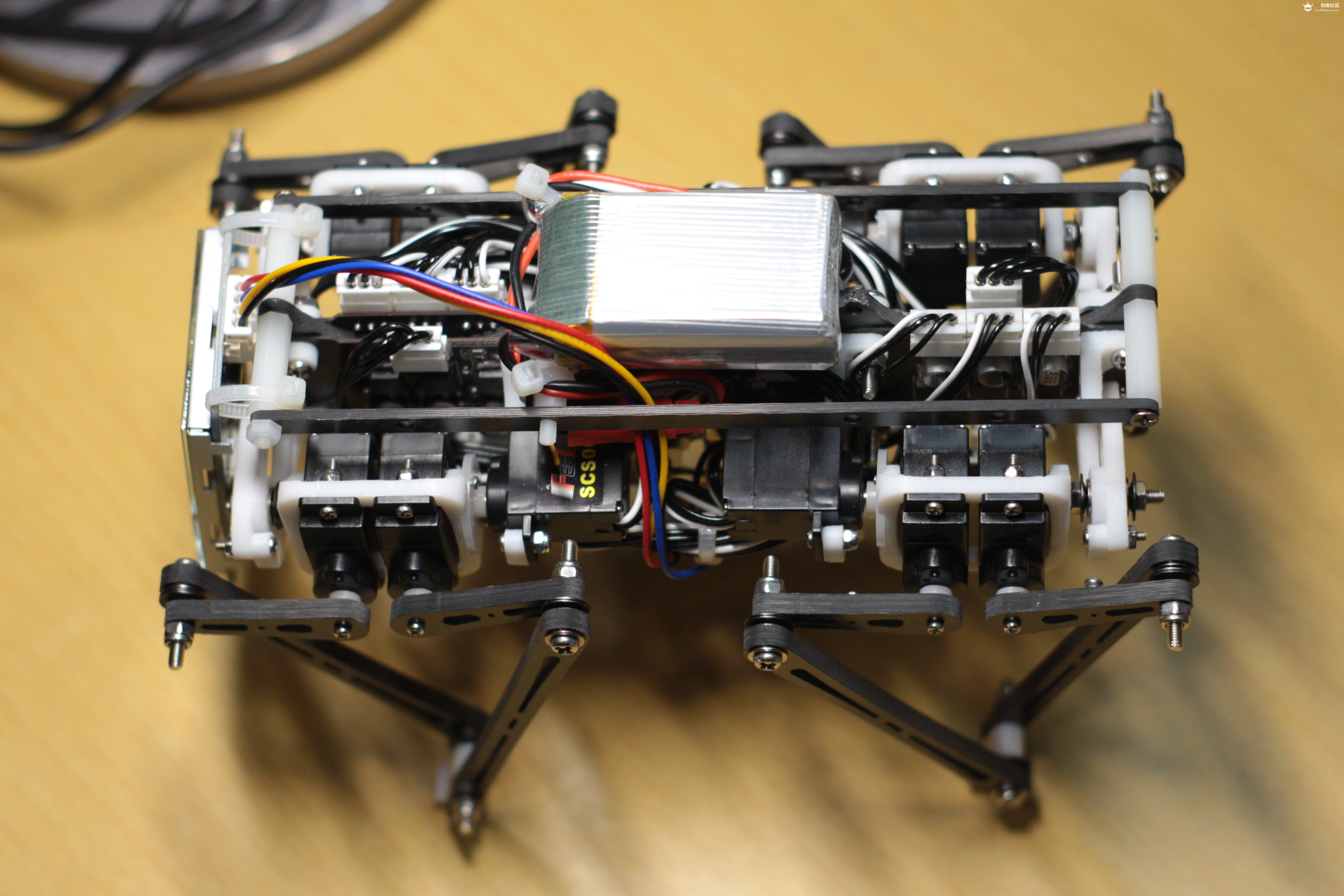 设计图 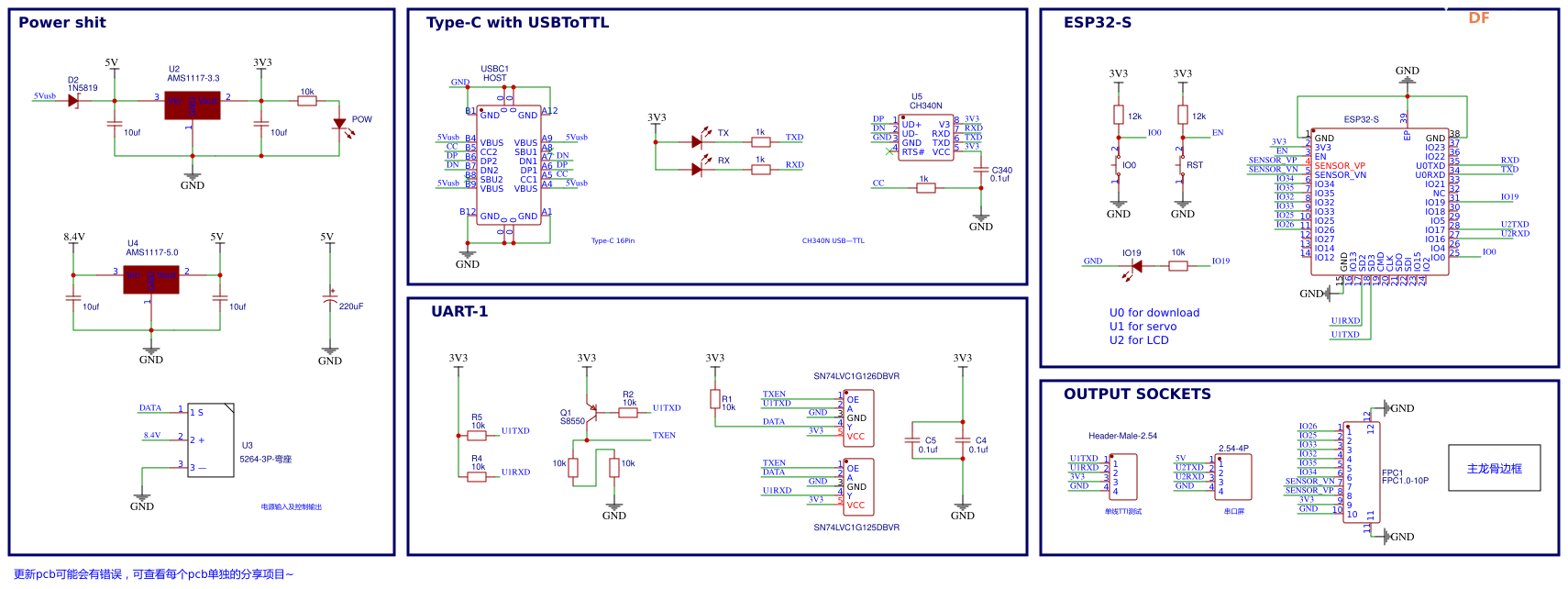 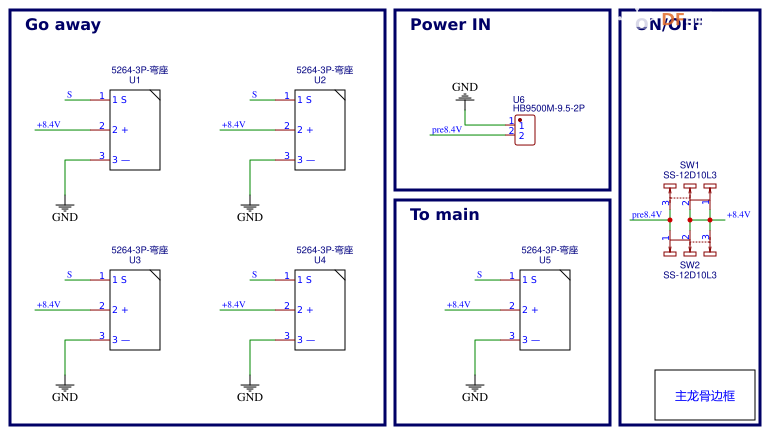 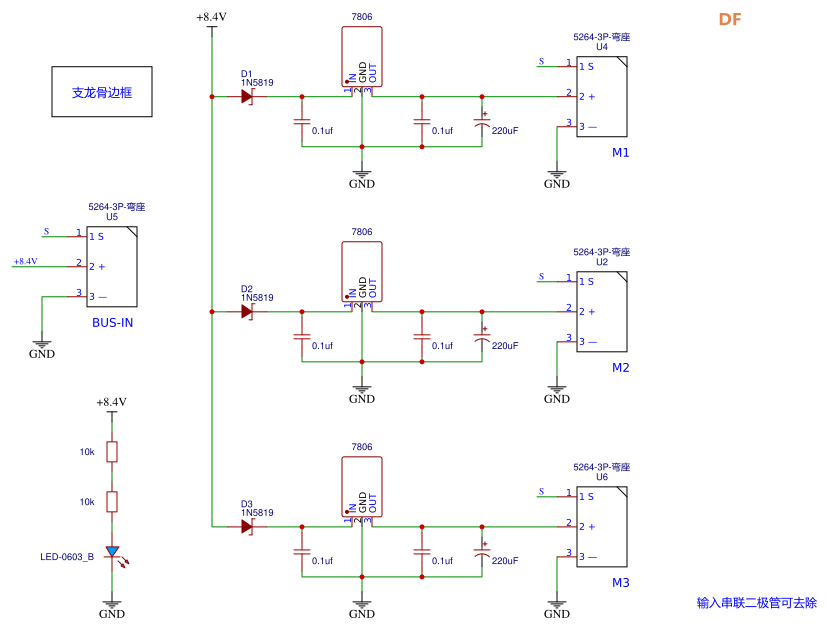 PCB 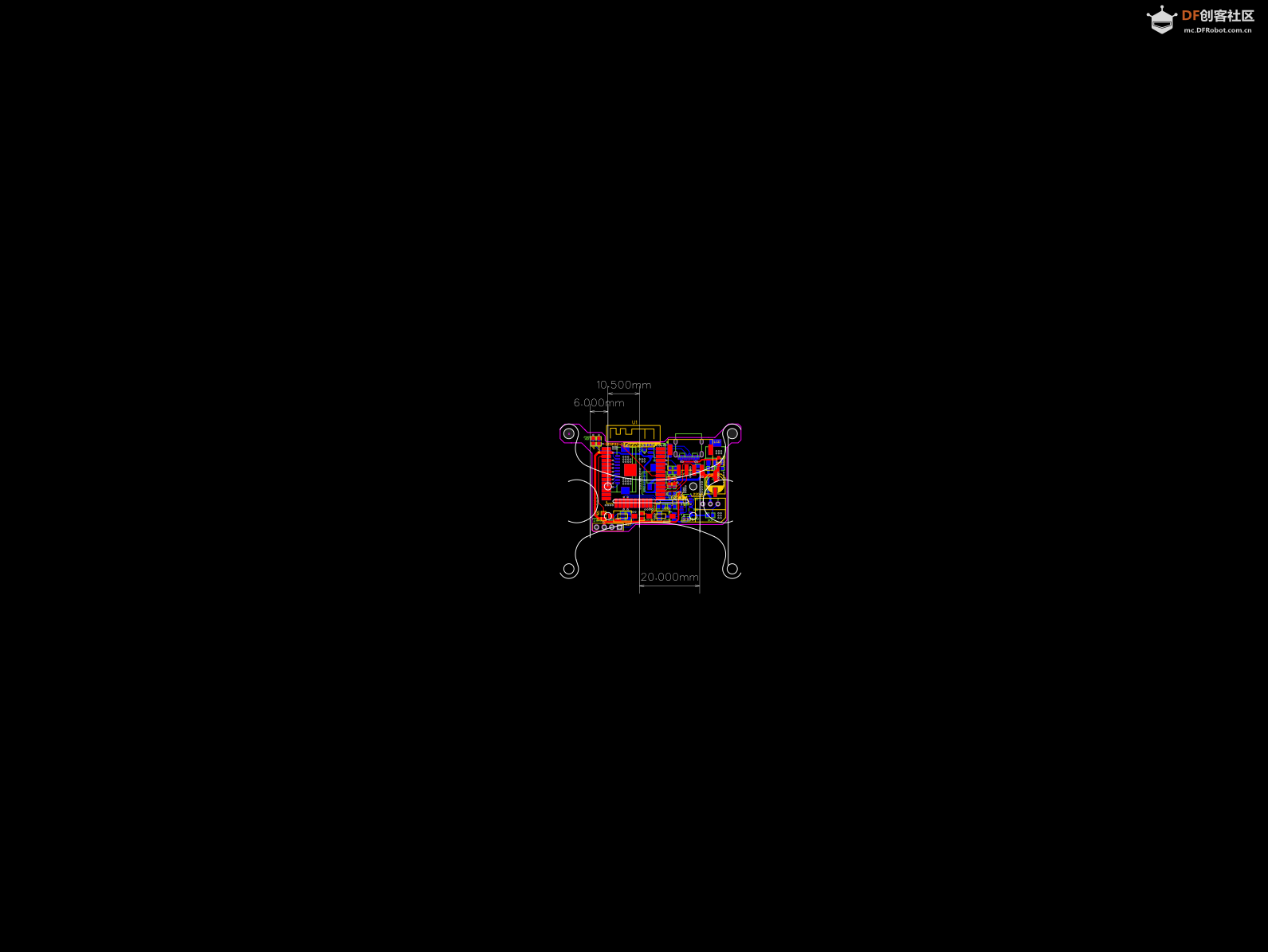 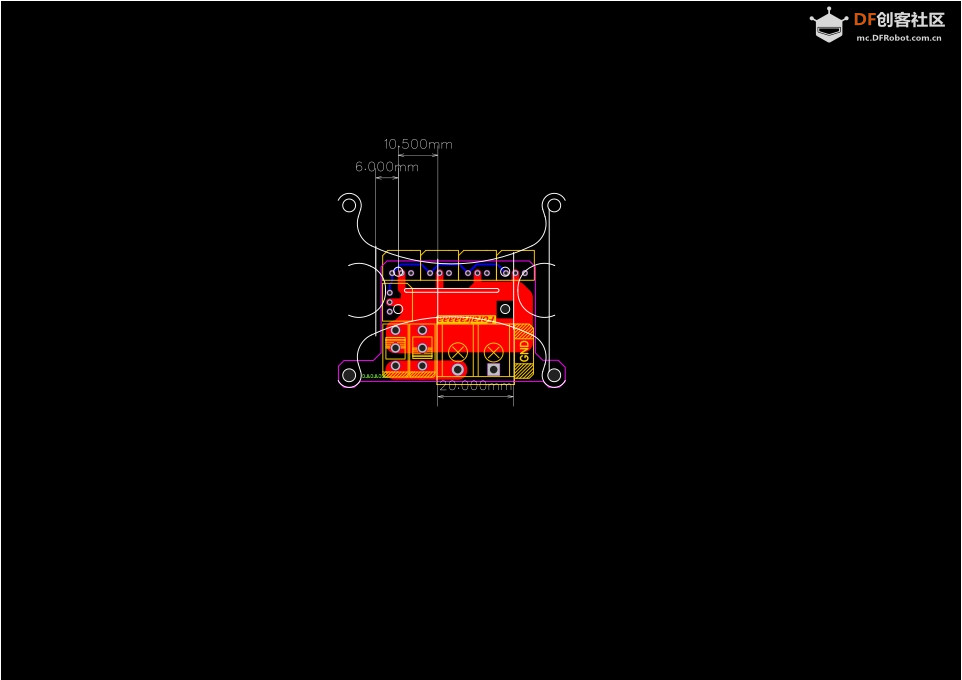  物料清单: 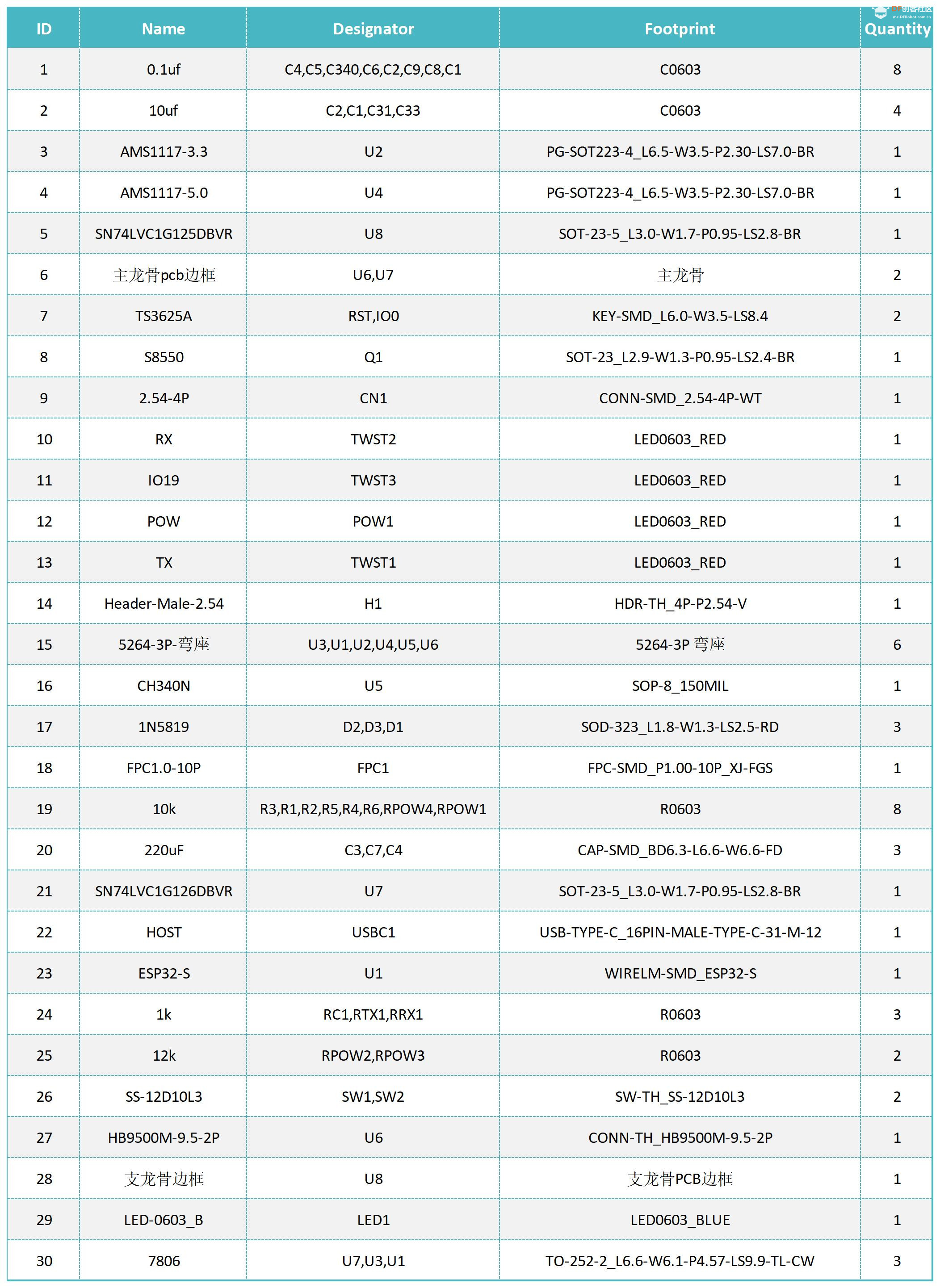 本文作者:Forairaaaaa |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed


 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶







