|
17806| 9
|
PID控制算法 |
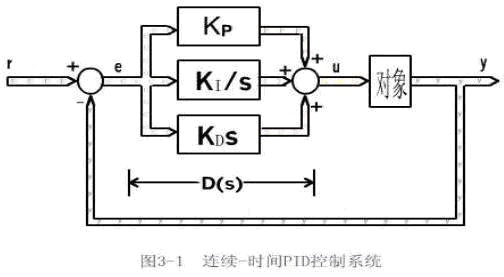 1,PID是一个闭环控制算法。因此要实现PID算法,必须在硬件上具有闭环控制,就是得有反馈。比如控制一个电机的转速,就得有一个测量转速的传感器,并将结果反馈到控制路线上,下面也将以转速控制为例。 2,PID是比例(P)、积分(I)、微分(D)控制算法。但并不是必须同时具备这三种算法,也可以是PD,PI,甚至只有P算法控制。我以前对于闭环控制的一个最朴素的想法就只有P控制,将当前结果反馈回来,再与目标相减,为正的话,就减速,为负的话就加速。现在知道这只是最简单的闭环控制算法。 3,比例(P)、积分(I)、微分(D)控制算法各有作用: 比例,反应系统的基本(当前)偏差e(t),系数大,可以加快调节,减小误差,但过大的比例使系统稳定性下降,甚至造成系统不稳定; 积分,反应系统的累计偏差,使系统消除稳态误差,提高无差度,因为有误差,积分调节就进行,直至无误差; 微分,反映系统偏差信号的变化率e(t)-e(t-1),具有预见性,能预见偏差变化的趋势,产生超前的控制作用,在偏差还没有形成之前,已被微分调节作用消除,因此可以改善系统的动态性能。但是微分对噪声干扰有放大作用,加强微分对系统抗干扰不利。 积分和微分都不能单独起作用,必须与比例控制配合。 4,控制器的P,I,D项选择。 下面将常用的各种控制规律的控制特点简单归纳一下: 1、比例控制规律P:采用P控制规律能较快地克服扰动的影响,它的作用于输出值较快,但不能很好稳定在一个理想的数值,不良的结果是虽较能有效的克服扰动的影响,但有余差出现。它适用于控制通道滞后较小、负荷变化不大、控制要求不高、被控参数允许在一定范围内有余差的场合。如:金彪公用工程部下设的水泵房冷、热水池水位控制;油泵房中间油罐油位控制等。 2、比例积分控制规律(PI):在工程中比例积分控制规律是应用最广泛的一种控制规律。积分能在比例的基础上消除余差,它适用于控制通道滞后较小、负荷变化不大、被控参数不允许有余差的场合。如:在主线窑头重油换向室中F1401到F1419号枪的重油流量控制系统;油泵房供油管流量控制系统;退火窑各区温度调节系统等。 3、比例微分控制规律(PD):微分具有超前作用,对于具有容量滞后的控制通道,引入微分参与控制,在微分项设置得当的情况下,对于提高系统的动态性能指标,有着显著效果。因此,对于控制通道的时间常数或容量滞后较大的场合,为了提高系统的稳定性,减小动态偏差等可选用比例微分控制规律。如:加热型温度控制、成分控制。需要说明一点,对于那些纯滞后较大的区域里,微分项是无能为力,而在测量信号有噪声或周期性振动的系统,则也不宜采用微分控制。如:大窑玻璃液位的控制。 4、例积分微分控制规律(PID):PID控制规律是一种较理想的控制规律,它在比例的基础上引入积分,可以消除余差,再加入微分作用,又能提高系统的稳定性。它适用于控制通道时间常数或容量滞后较大、控制要求较高的场合。如温度控制、成分控制等。 鉴于D规律的作用,我们还必须了解时间滞后的概念,时间滞后包括容量滞后与纯滞后。其中容量滞后通常又包括:测量滞后和传送滞后。测量滞后是检测元件在检测时需要建立一种平衡,如热电偶、热电阻、压力等响应较慢产生的一种滞后。而传送滞后则是在传感器、变送器、执行机构等设备产生的一种控制滞后。纯滞后是相对与测量滞后的,在工业上,大多的纯滞后是由于物料传输所致,如:大窑玻璃液位,在投料机动作到核子液位仪检测需要很长的一段时间。 总之,控制规律的选用要根据过程特性和工艺要求来选取,决不是说PID控制规律在任何情况下都具有较好的控制性能,不分场合都采用是不明智的。如果这样做,只会给其它工作增加复杂性,并给参数整定带来困难。当采用PID控制器还达不到工艺要求,则需要考虑其它的控制方案。如串级控制、前馈控制、大滞后控制等。 5,公式: 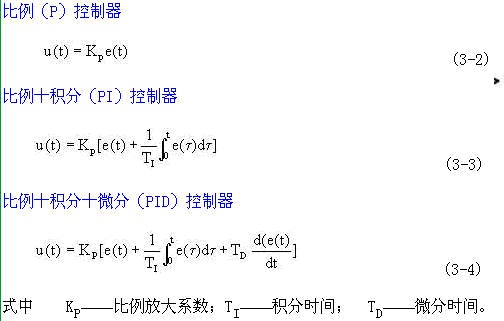 数值pid的计算: 数值pid的计算:6,问题。Kp,Ti,Td三个参数的设定是PID控制算法的关键问题。一般说来编程时只能设定他们的大概数值,并在系统运行时通过反复调试来确定最佳值。因此调试阶段程序须得能随时修改和记忆这三个参数。 7,参数的自整定。在某些应用场合,比如通用仪表行业,系统的工作对象是不确定的,不同的对象就得采用不同的参数值,没法为用户设定参数,就引入参数自整定的概念。实质就是在首次使用时,通过N次测量为新的工作对象寻找一套参数,并记忆下来作为以后工作的依据。 8,pid算法流程图: 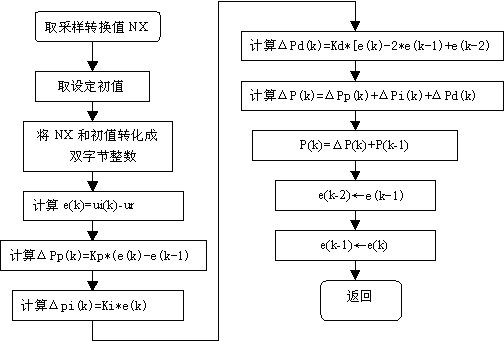 |
 活跃会员
活跃会员



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶






