|
74375| 53
|
[项目] DIY风扇的故事 |

|
为了珍视我的第一次发贴,我想,这个电风扇的故事得自己讲!  故事的开始要从这个螺旋桨讲起(就像当年奔驰造车也是从发动机开始的一样,编的呀)!螺旋桨是2012年开始玩四轴的时候遗留下来的,那时候我备了好多好多螺旋桨!透露一个残忍的数字:至今在我手上终结的四轴飞行器达 5架 之多,有的是粉身碎骨、有的是直接失控飞跑了。。。。。在漫长的一段时间里,我飞机飞丢都成了别人茶前饭后调侃我的一个热点话题,哈哈!  这是血泪史,不细说了,不过强调一下,它们的牺牲都是有价值的,历史会记住它们的 所以我有很多很多既孤独又失落的螺旋桨 好吧,既然题都跑了,我又舍不得删掉,那么就 让题继续跑一会儿,说说为什么玩四轴,首先不是因为四轴好玩,其次不是因为看见别人玩我就玩,(这点必须强调一下,俺是非常有追求的)哈哈!从2012年开始玩四轴,我的初衷是想基于四轴的形态来做一个飞行汽车的小原型。不过在四轴方面的摸索于2013年就结束了,后期玩四轴的追求就是的一个心跳和爽飞!在此拜谢后续因此牺牲掉的四轴们,我对不起你们!  My god! 我的主题是电风扇,为什么扯这么多?? 言归正传吧,因为从北方北戴河待了一年之后,好怕热,在上海4月份至今,就一直是穿T恤,5月份的时候感觉穿T恤还是有点热,裸奔又不太好,然后看见家里还有那么多螺旋桨吃着灰尘,于心不忍啊!并且公司研发的高大上Overlord3D打印机就在我前面距我不足50公分,如此天时地利,不自己造一个电风扇简直可惜。必须造起来!造起来!造起来!  作为一个有追求有情怀的人,我DIY的电风扇必须得和淘宝的20块钱买的那个小电风扇有些不同吧!!首先想到了加一个电源开关和调节风速旋钮,风速可调节为的就是有一个舒服的风速,不至于如图  这种超级体验! 这种超级体验!但是在实际使用过程中发现,开关有些多余,与旋钮在功能上有重叠!学习乔布斯的精神,做减法!果断干掉开关!!!但是在后续的体验过程中又有新的问题,每次使用旋钮开和关太烦人了,不关又浪费电,不开又热的受不了,整天就是:开呀关、开呀关、开呀关、开呀关、开呀关、开呀关。。。。。。。。 简直不能忍!没办法,人都是懒惰的,并且只会越来越懒。 于是乎,想到了加一个传感器来做出开和关的判断,开始想到了用红外测距传感器GP2Y0A21或者超声波传感器,同事也提到了用人体热释电红外传感器,简单分析这三个传感器的特性,个人感觉前两种传感器比较靠谱,热释电传感器广角太广,人没在电风扇前方也在吹,这样太浪费电了。最后考虑还是用红外测距传感器GP2Y0A21,因为广角够小,还能修正人的坐姿,不错,一举多得!!传感器选型定了,那么它最佳安装位置又是哪里呢?在思考这个问题的时候,有同事提出,你这个螺旋桨裸奔,太危险了,削到人怎么办?OK,结合这两个问题,传感器固定的最佳位置当然是在螺旋桨防护罩的前面正中间啦。俗话又说怎么说? 后期考虑到每个人坐姿不同,希望风吹的部位也不同,我们选择在电风扇的支架部分做了一些处理,用于俯仰和左右可手动调节,有一定阻尼,调节好就能定位住。 此举还有一重要意义,为了便于后期升级为第二代智能追踪动体电风扇的考虑。 俗话说,兼容前一代产品是苹果一贯的固有做法,思想上我们也不能落后。  就这样,同时伴随着3D绘图,3D打印,3D再绘图,3D再打印!一步一趋向完善,它诞生了!  实物拍摄,有没有觉得我们线控旋钮的小盒子挺漂亮?手感超赞!哈哈 一切就是这样简单、快捷,从 idea到真真实实摆在你面前的这台电风扇,占用不了多少业余时间。 只要你愿意,随时都可以造起来,打造自己专属的、充满情怀的、充满创意的任何东西! https://www.tudou.com/programs/view/ncj41UOrRv0/  看清楚哦,这只是第一代!骚年们,期待屌炸天的第二代吧!先透露一下,第二代的关键词是:智能追踪 如下就是电风扇的详细资料: 一,电路部分 1.1做一个智能风扇我们需要有以下电子部件:
1.2整个系统的电路部分设计参考开环系统的设计方案制作的,具体可见功能流程图: 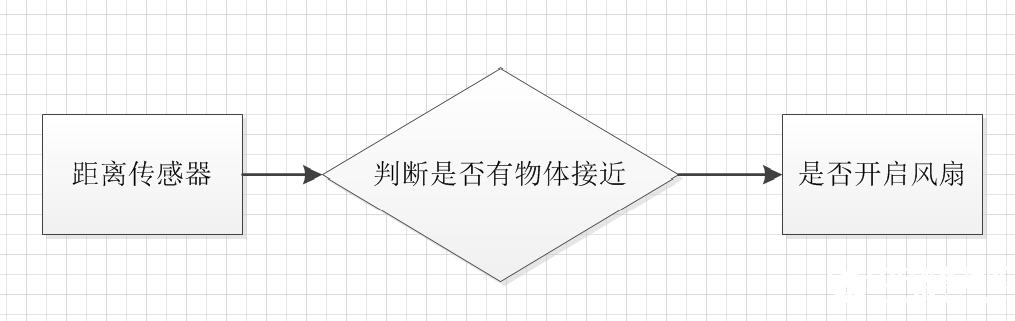 1.3按照功能流程图的思路,我们搭建了电子电路的电路图: 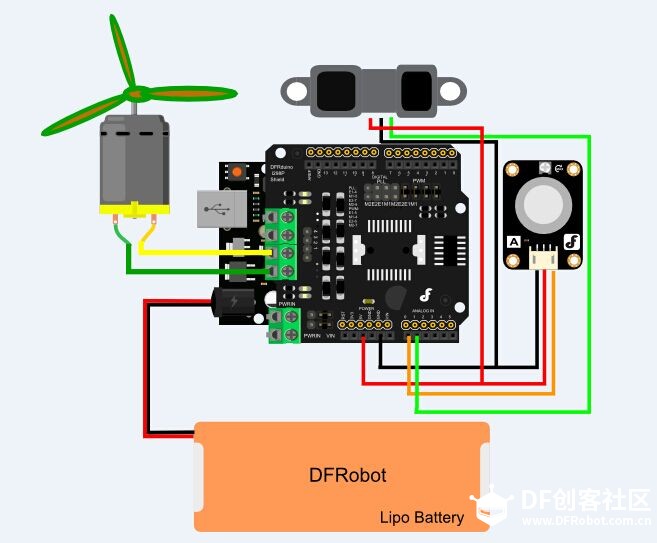 二,机械部分 2.1搭建好了电路部分,现在就需要一个载体来承载这个硬件电路,首先需要设计如何固定好普通的130或180小电机,如下图所示:  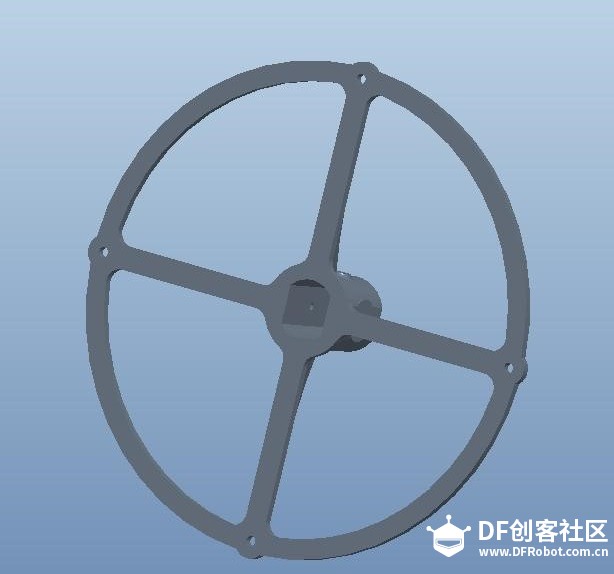 2.2螺旋桨防护后罩:中间的部位是用来固定电机的,外围的四个孔用于连接螺旋桨防护前罩; 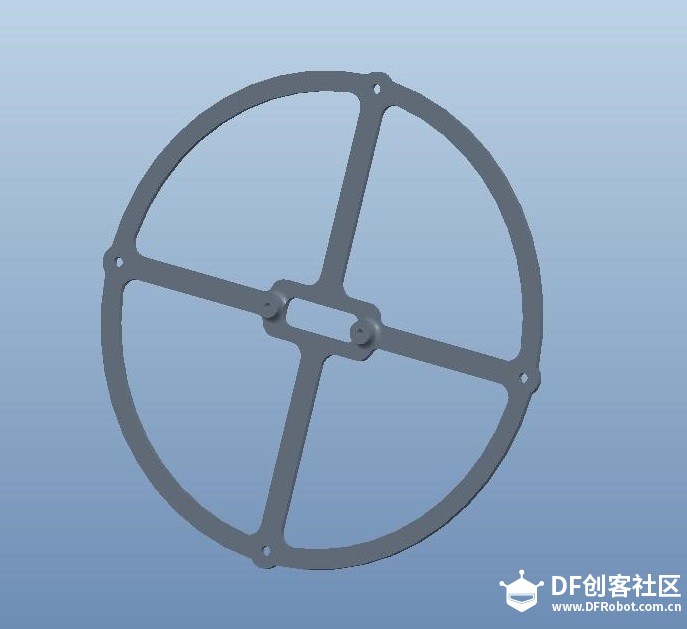 2.3螺旋桨防护后罩:中间的位置用于固传感器的,外围的四个孔用于M3螺丝柱连接螺旋桨防护后罩; 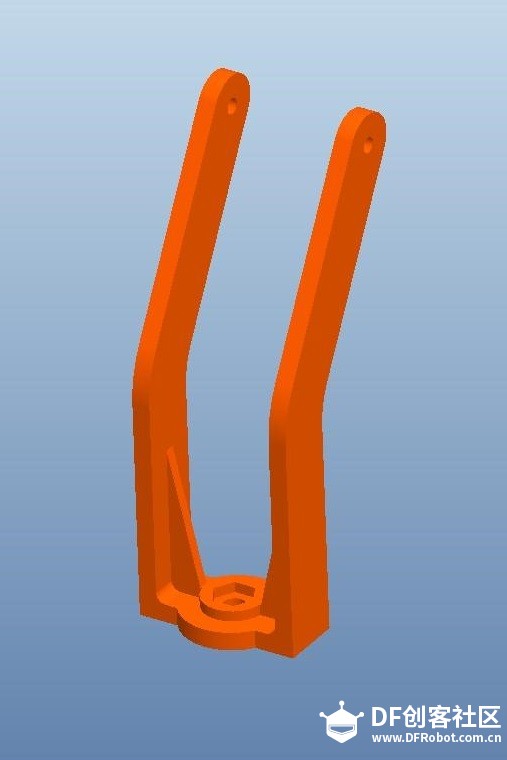 2.4支架:用于支撑风扇头的支架,底部有沉孔,用于固定螺母; 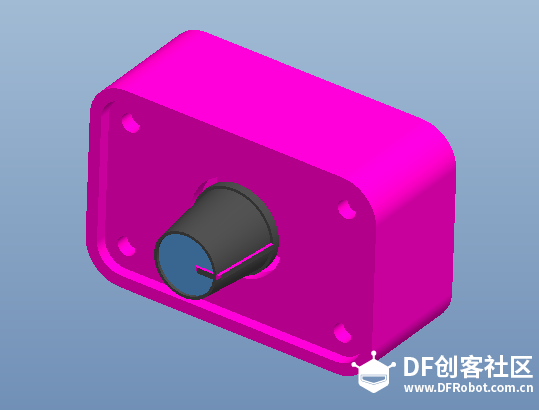 2.5调速盒:用于安装线控调速器的; 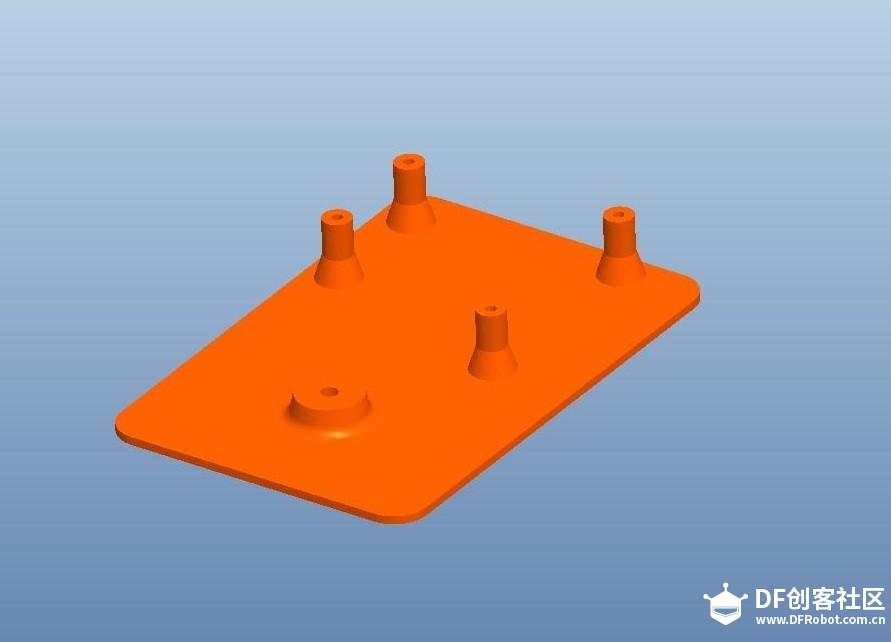 2.6安装底座:用于支撑整个电风扇和固定控制板  2.7风扇扇叶与联轴器:风扇扇叶6寸,为了很好的将此扇叶固定在2mm轴上,需要额外制作一个联轴器,如上 2.8下图为软件装配模拟图的效果图: 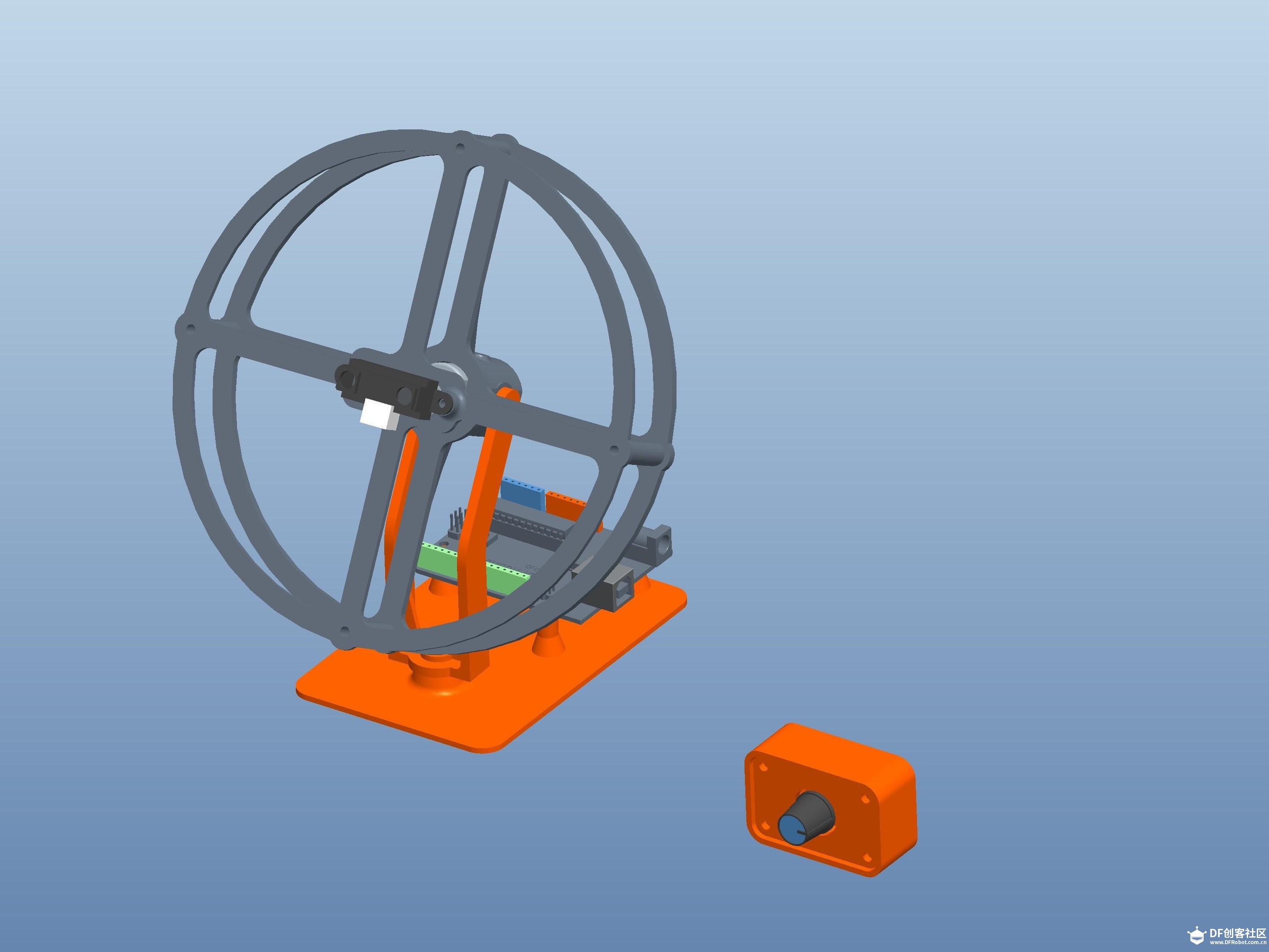 三软件部分 整个系统已经组装好之后就需要一个程序去运行它,首先先确定功能: 1,电风扇能够运行,并且还具有调节风扇大小的功能; 2,在有人的时候风扇允许打开,在人走了之后风扇自动关闭。 根据上述功能描述,我们做好整个程序的流程图,如下图所示: 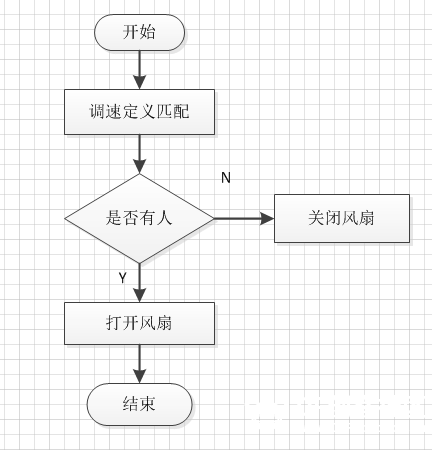 根据上图所示的程序流程图我们编辑出以下程序代码: int E1 = 5;定义了风扇使能管脚 int F1 = 4;定义风扇转速输出 void fandriver(int a,int i) 定义风扇函数,用于启动风扇和控制旋转速度快慢; { analogWrite (E1,a); digitalWrite(F1,i); } uint16_t get_gp2d12 (uint16_t value) 测距运算函数,用于处理测距传感器传回来的数据; { if (value < 30) value = 30; return ((67870.0 / (value - 3.0)) - 40.0);} void setup() { for(int i=4;i<=5;i++) pinMode(i, OUTPUT); pinMode(A1,INPUT); pinMode(A0,INPUT); } void loop() { uint16_t value1 = analogRead (A0); 接收距离数据; uint16_t range = get_gp2d12 (value1); 处理接收到的数据; if(range<1000) { Motor_speed=map(analogRead(A1),0,1024,0,256); 调速器匹配到电机转速; if(Motor_speed<30)Motor_speed=0; 门限设置,用于滤掉风扇不转的速度; fandriver(Motor_speed,1); 风扇转动; } else fandriver(0,0); 风扇停止 } Bill of Materials
|



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶







