|
18874| 13
|
[3D+Arduino课程(中学生)] 3D+Arduino——精舞堂BOB(详细教程) |
|
本帖最后由 hnyzcj 于 2015-7-5 09:27 编辑 【项目介绍】 想不想在你的书桌上放一个呆萌可爱的小机器人呢?在无聊的时候,控制它来为你“跳个舞”,缓解一下百无聊赖的心情。今天这里给大家分享案例是精舞堂BOB。它是一个根据前方物体远近距离,改变舞蹈动作的3D打印机器人。 样图 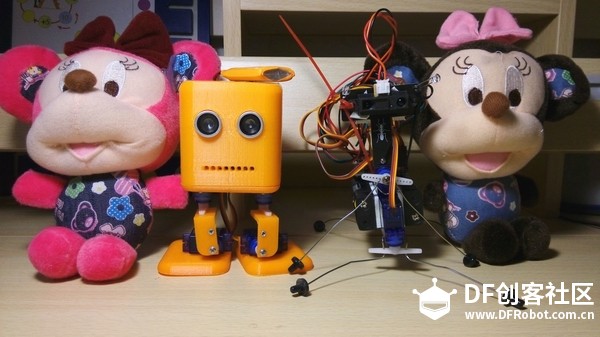 视频 http://www.tudou.com/programs/view/Qlfs4aYtFZI/ 广告之后马上回来……有网友想了解DF新机Overlord的打印质量,我也答应了下来。为了兑现承诺就在这里做一下DM 和OL的打印效果对比。为了能够让广大网友对打印效果有个清晰的对比,我准备从视觉和触觉两个方面做对比。   触觉:(打出来自己摸吧) 细腻、光滑。 【项目器材】 1.75mm PLA (1公斤) 3D打印耗材 (橙色) DFBeetle控制器 1 DFBeetle住控制器扩展板 1 DFrobot SG90舵机 4 Risym HC-SR04超声波模块 1 DFrobot 3.7V锂电池 1 DFrobot 3.7V锂电池充电器 1 单芯杜邦线(10根母-母) 1 基础焊接工具套装 1(选配) 【制作步骤】 第一部分机械结构 A.3D打印模型 本次3D打印机器人共有4部分组成:头部、底板、腿部、脚部。经过多次试验测试分析BOB在运动过程中的稳定性、可靠性以及打印所需的时间、原材料的消耗,以及强度等综合考虑。对打印的部件设置了不同的填充率,其设置为头部20%,底板20%,腿部100%,脚部50%。部件数量:头部和底板各1个,腿部和脚部各2个。 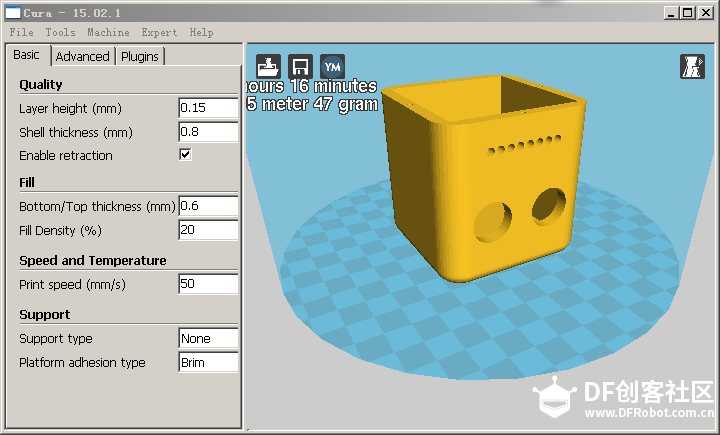 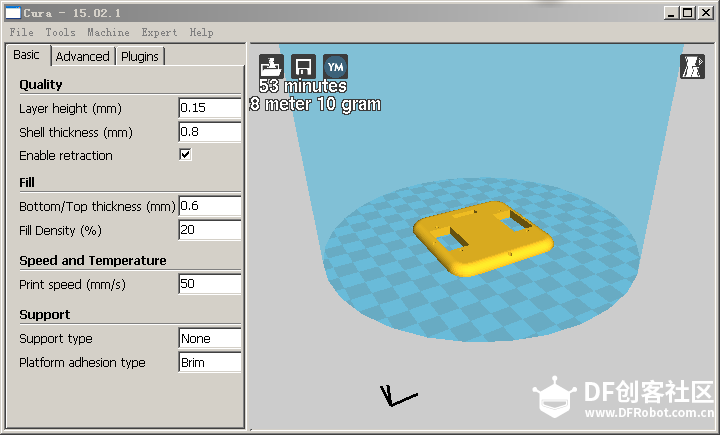 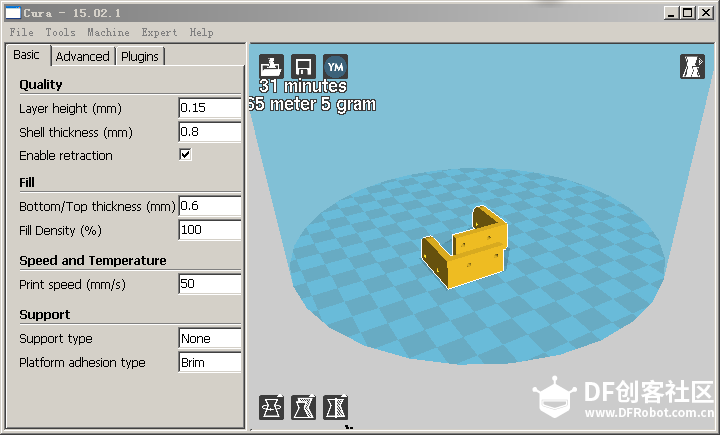 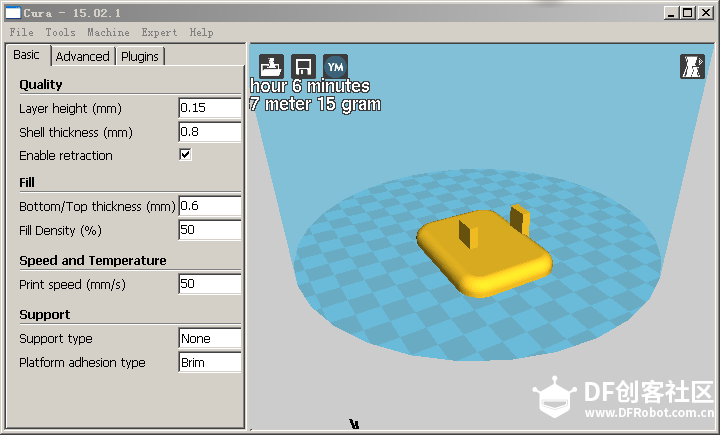 通过3D打印机打印完成四个部分的组件,如下图所示  底板机械部分安装 取出两只舵机,按下图所示方向安装,作为机器人腿根部的关节控制部分。(注意:打印件仍然需要适当修模,使用锉刀,简单清理一下舵机的槽位,以便轻松的安装舵机)  腿部机械部分安装 取出舵机的单向舵盘,按下图所示的方向安装好以后,用螺丝固定。(注意,固定舵盘旋转轴的地方使用较长点的螺丝,保证舵机在转动过程中,腿部与其能够同步转动。) 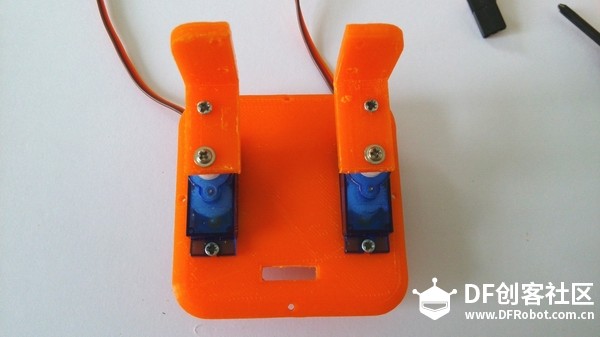 脚部机械部分安装将上述组合件翻身,用螺丝将2个单向舵盘固定在腿部的垂直面内侧,  再取出两只舵机安放在两只脚上如下图所示。  将上述组合件与左右脚部分组合为一整体,此时BOB下半身已经完成机械结构的安装。 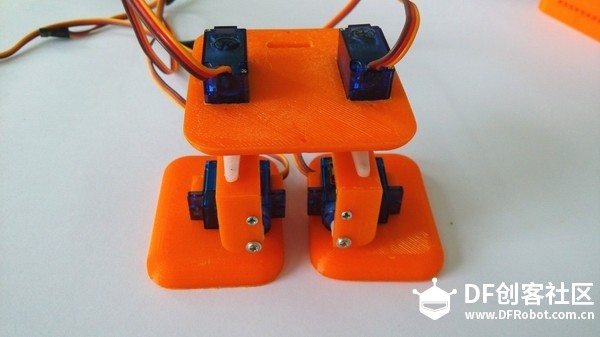 头部组合安装 头部的安装比较简单,只要按正确的方向将头部卡在下半身上即可。整体效果如下图所示。可以看到BOB已经初具雏形了。 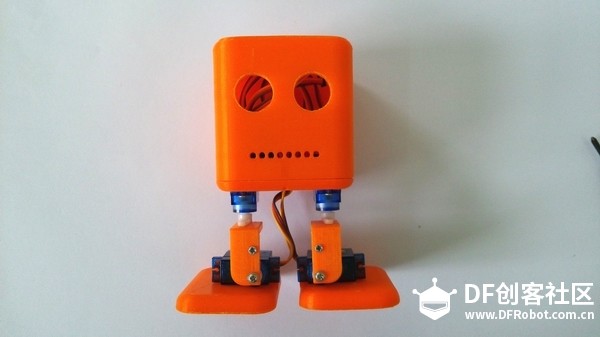 第二部分BOB电子部分 此次推荐使用 的控制板是Beetle控制器和Beetle主控器拓展板,说起Beetle大家一定不陌生。作为DFRobot全新一代微型控制器Beetle了它只有硬币大小!但是它的功能依然强大:10个数字口,4个PWM,5个模拟输入,2组电源端口,满足你对Leonardo的高要求。相信各位小伙伴在制作一个小巧美观的互动作品时,常常为选择合适大小的主控器而苦恼。现在你可以把Beetle隐藏到任何作品当中,例如本例中的BOB。 Beetle引脚定义 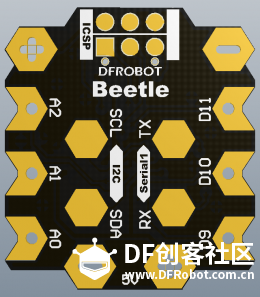 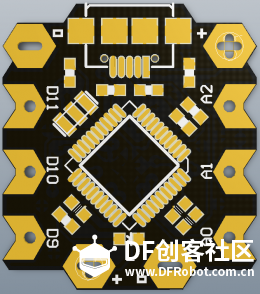 Beetle主控器PWM口分别为(3,9,10,11)。(注意:数字口3对应SCL,而在Beetle 扩展板上是没有SCL的,因此需要我们自己焊接一根线将SCL引出如下图所示) 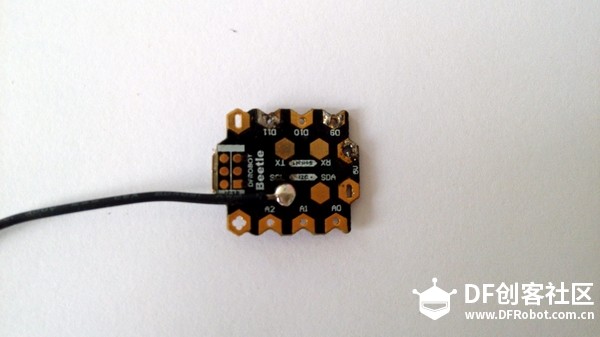 再将Beetle主控器安装在Beetle扩展板上,依次焊接各引脚。 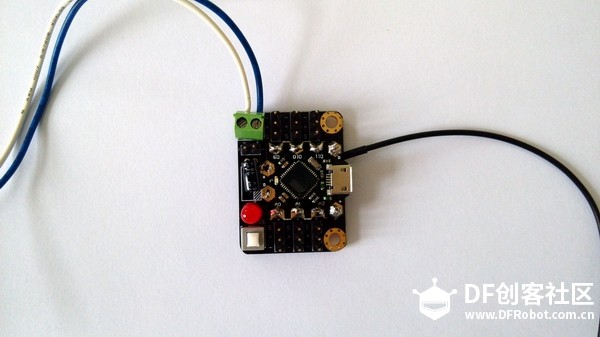 BOB眼睛部分使用的是HC-SR04超声波测距传感器,其四根引脚VCC、TRIG、 ECHO 、 GND分别用红、蓝、黄、绿四根杜邦线引出。 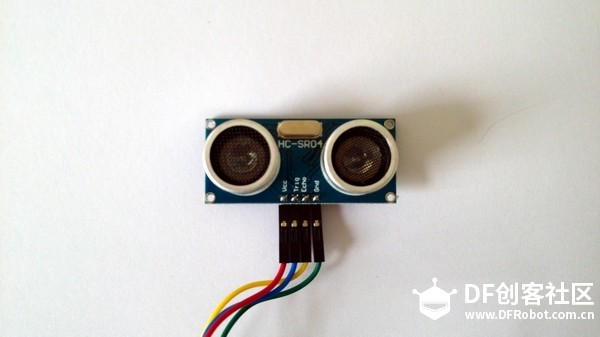 电路连线: 舵机连线:左右脚部舵机(左脚接数字口11,右脚接数字口3,由于数字口3是我们引出的,所以将引出的SCL引脚引入右脚舵机的数字口,再将其VCC和GND接入拓展板)左右腿部分舵机左腿接数字口10,右腿接数字口9。 超声波连线:超声波传感器的VCC\GND\Echo\Trig引脚分别接扩展板的VCC\GND\A0\A1口。 连线接好以后烧录一下程序,调整舵机初始位置为90度。(注意Beetle控制器的Board类型为Arduino Lenardo) #include <Servo.h> // creating the servo objects for front, rear and mid servo Servo myservorhip; Servo myservolhip; Servo myservorankle; Servo myservolankle; // setting the servo angle to 90° for startup byte LlegAngle = 90; byte RlegAngle = 90; byte LnetAngle = 90; byte RnetAngle = 90; // Setup function void setup(){ myservorhip.attach(9); myservolhip.attach(10); myservorankle.attach(3); myservolankle.attach(11); // move servos to center position -> 90° myservorhip.write(LlegAngle); myservolhip.write(RlegAngle); myservorankle.write(LnetAngle); myservolankle.write(RnetAngle); delay(2000); } // The loop remains empty void loop(){ } 上述程序烧录以后,修正BOB腿部和脚部,使其成为正直姿态。再次烧录下列程序代码:该代码的功能当超声波测距测得的距离小于100时,脚部舵机转动,BOB做45度角倾斜动作;当距离大于100时,BOB左右腿做扭动舞蹈。 #define ECHOPIN A0 // Pin to receive echo pulse #define TRIGPIN A1 // Pin to send trigger pulse #include <Servo.h> // 声明调用Servo.h库 Servo myservorhip; // 创建一个舵机对象 Servo myservolhip; // 创建一个舵机对象 Servo myservorankle; // 创建一个舵机对象 Servo myservolankle; // 创建一个舵机对象 int pos = 0; // 变量pos用来存储舵机位置 void setup(){ Serial.begin(9600); pinMode(ECHOPIN, INPUT); pinMode(TRIGPIN, OUTPUT); myservorhip.attach(9); // 将引脚9上的舵机与声明的舵机对象连接起来 myservolhip.attach(10); myservorankle.attach(3); myservolankle.attach(11); } void loop(){ myservorankle.write(90); myservolankle.write(90); myservorhip.write(90); myservolhip.write(90); digitalWrite(TRIGPIN, LOW); // Set the trigger pin to low for 2uS delayMicroseconds(2); digitalWrite(TRIGPIN, HIGH); // Send a 10uS high to trigger ranging delayMicroseconds(10); digitalWrite(TRIGPIN, LOW); // Send pin low again int distance = pulseIn(ECHOPIN, HIGH); // Read in times pulse distance= distance/58; // Calculate distance from time of pulse if (distance<100){ for(pos = 90; pos < 120; pos += 1){ myservolhip.write(pos); myservorhip.write(pos); delay(30); // 延时30ms让舵机转到指定位置 } // 舵机从180°转回到0°,每次减小1° for(pos = 120; pos>=90; pos-=1) { myservorhip.write(pos); myservolhip.write(pos); // 写角度到舵机 delay(30); // 延时30ms让舵机转到指定位置 } } else{ for(pos = 80; pos>=60; pos-=1) { myservorankle.write(pos);// 写角度到舵机 myservolankle.write(pos);// 写角度到舵机 delay(30); // 延时30ms让舵机转到指定位置 } for(pos = 60; pos < 80; pos += 1){ myservorankle.write(pos); // 写角度到舵机 // 给舵机写入角度 myservolankle.write(pos);// 写角度到舵机 delay(30); // 延时30ms让舵机转到指定位置 } } Serial.println(distance); delay(50); // Wait 50mS before next ranging } 现象: Beelte正常使用,加载新程序后,在电脑上找不到Beetle的虚拟串口? 原因: 在排除接线问题后,此现象一般是新程序影响了USB通讯导致。Beetle/Leonardo的USB转串口是由相应的软件实现的(Arduino IDE中实现),它和用户程序都在ATMEGA32U4中,如果用户程序影响了USB的相关操作将导致看不到USB虚拟串口。此时需要重新加载可用的用户程序(比如Blink)。 由于Beetle/Leonardo已经和电脑失去联系,不能自动复位,需要人工复位方式进行加载。Beetle的复位需要通过跳线短接ICSP接口中的RESET和GND来实现。 注意Beetle/Leonardo上电启动时将直接运行用户程序,因此通过插拔USB不能使其进入Bootloader。 方法: 手动复位下载程序过程: 1)在Arduino IDE中打开blink程序,单板类型选择为“Leonardo”,点击“upload”上载程序; 2)当IDE中显示“uploading”时,用跳线进行软复位(将ICSP接口中的RESET和地短路一下后断开); 3)等待程序加载完毕。 【测试运行】 将3.7V锂电池 的正负极插在Beetle扩展板的电源接口上,按下开关。BOB 根据前方物体的距离,跳出不同的舞蹈。 |

165.82 KB, 下载次数: 18680



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed


 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶

 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 版主限定
版主限定
 牛X认证
牛X认证
 创作达人
创作达人
 小蘑菇
小蘑菇
 蘑菇人
蘑菇人
 蘑菇老人
蘑菇老人
 荣誉教师
荣誉教师
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 ARD DAY
ARD DAY
 编辑选择奖
编辑选择奖
 创客造
创客造
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖






