|
28672| 10
|
[Arduino/Genuino 101 入门教程] 海盗4WD 多功能小车 功能介绍与展示 |
海盗4WD机器人移动平台采用新版的Bluno Romeo作为主控制器,集成了Arduino UNO R3、电机驱动、IO传感器扩展板和蓝牙4.0通讯模块,具备机器人的所有基本功能。通过添加不同传感器,可实现包括寻线,避障,环境监测,灯光装饰灯不同效果。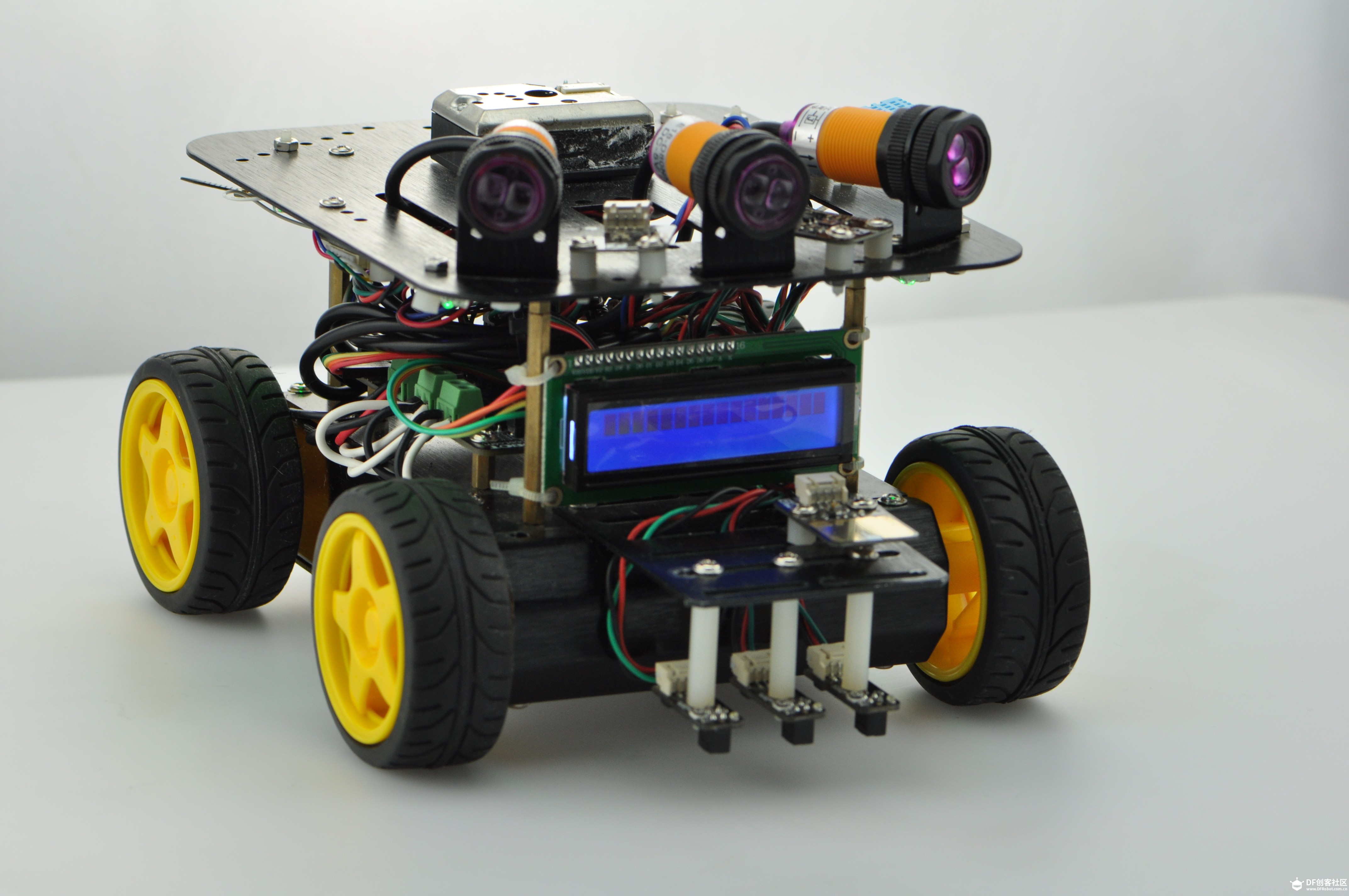 小车寻线 小车前置的寻线传感器对黑白两色分别输出高低电平,通过编译代码来实现不同情况下小车的行进方向。 可以看到小车速度较快的时候会冲出黑色胶带的位置,之后后退调整继续前行,这种表现可以通过增添更多地传感器完善代码或者降低速度给小车足够的寻线时间来改善。 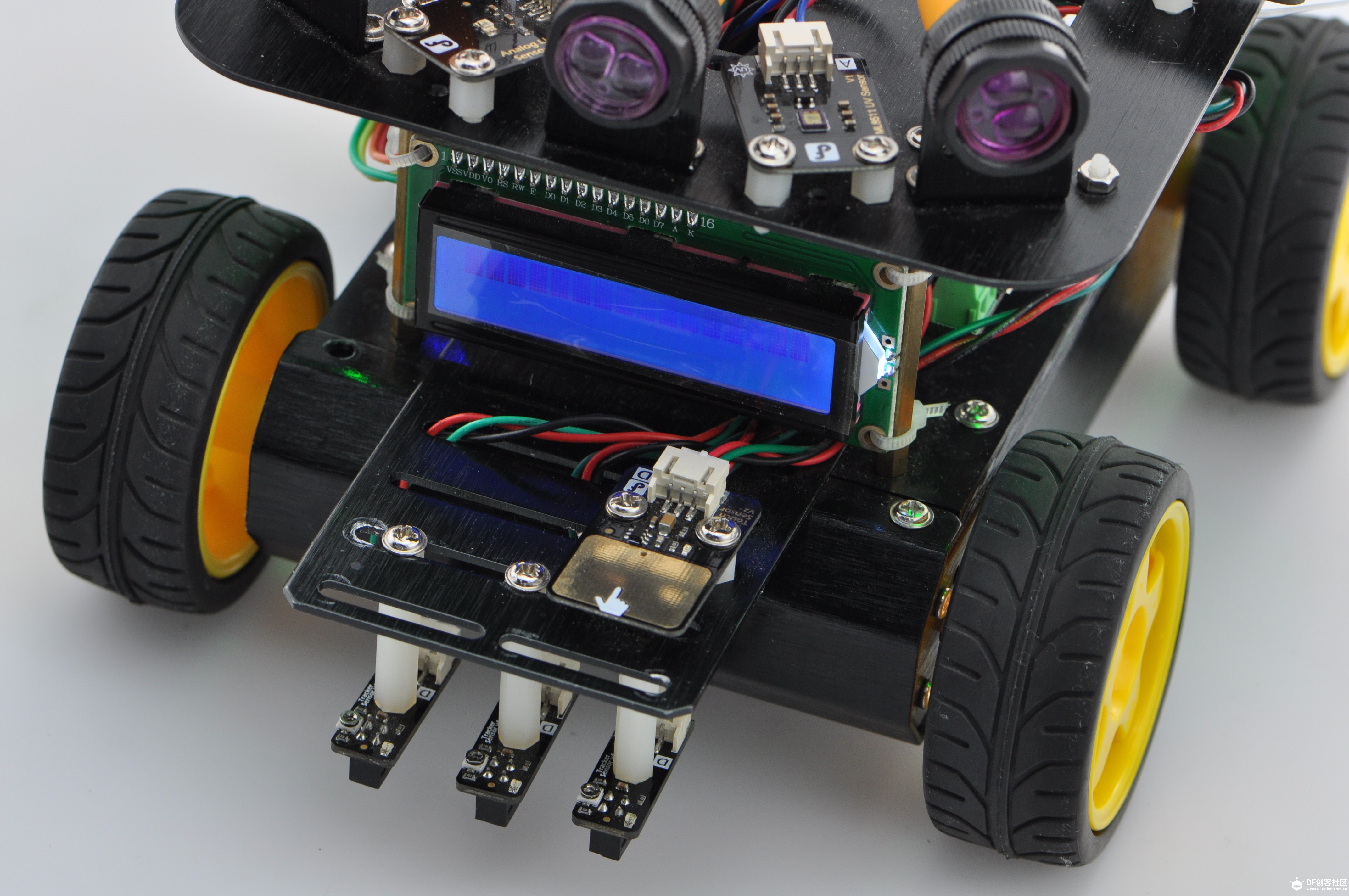 使用部件:Mini寻线传感器V3.0 小车避障 小车顶部的三个红外避障传感器可以检测到前方3-80cm的障碍物,并通过障碍物的不同位置采取不同的行进方向,实现避障功能。 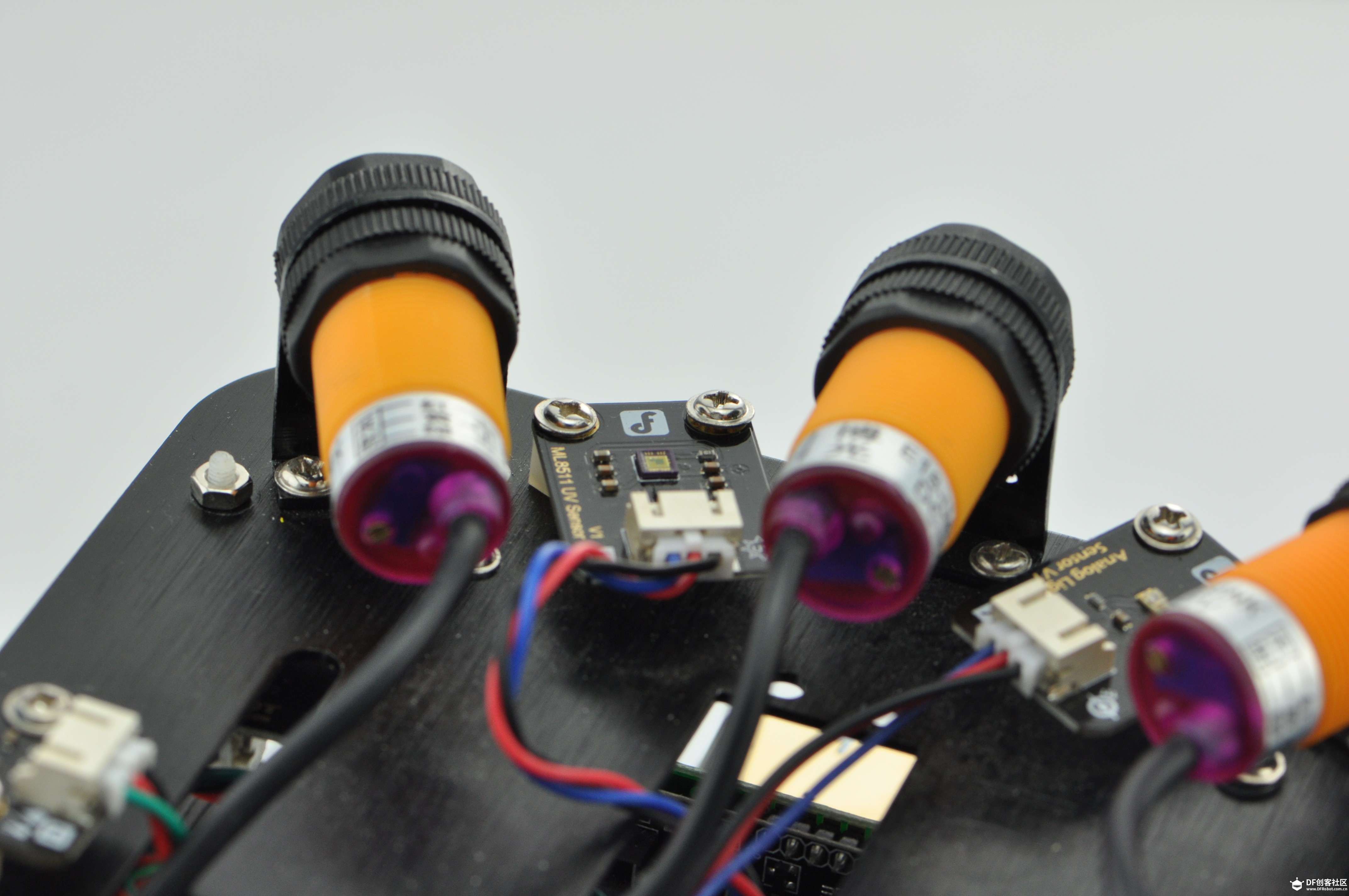 使用部件:3-80cm红外数字壁障传感器 环境监测 小车上可以安装大气、温度湿度、光检测、尘埃检测、等传感器,并将其数据显示在小车上安装的lcd屏幕上。 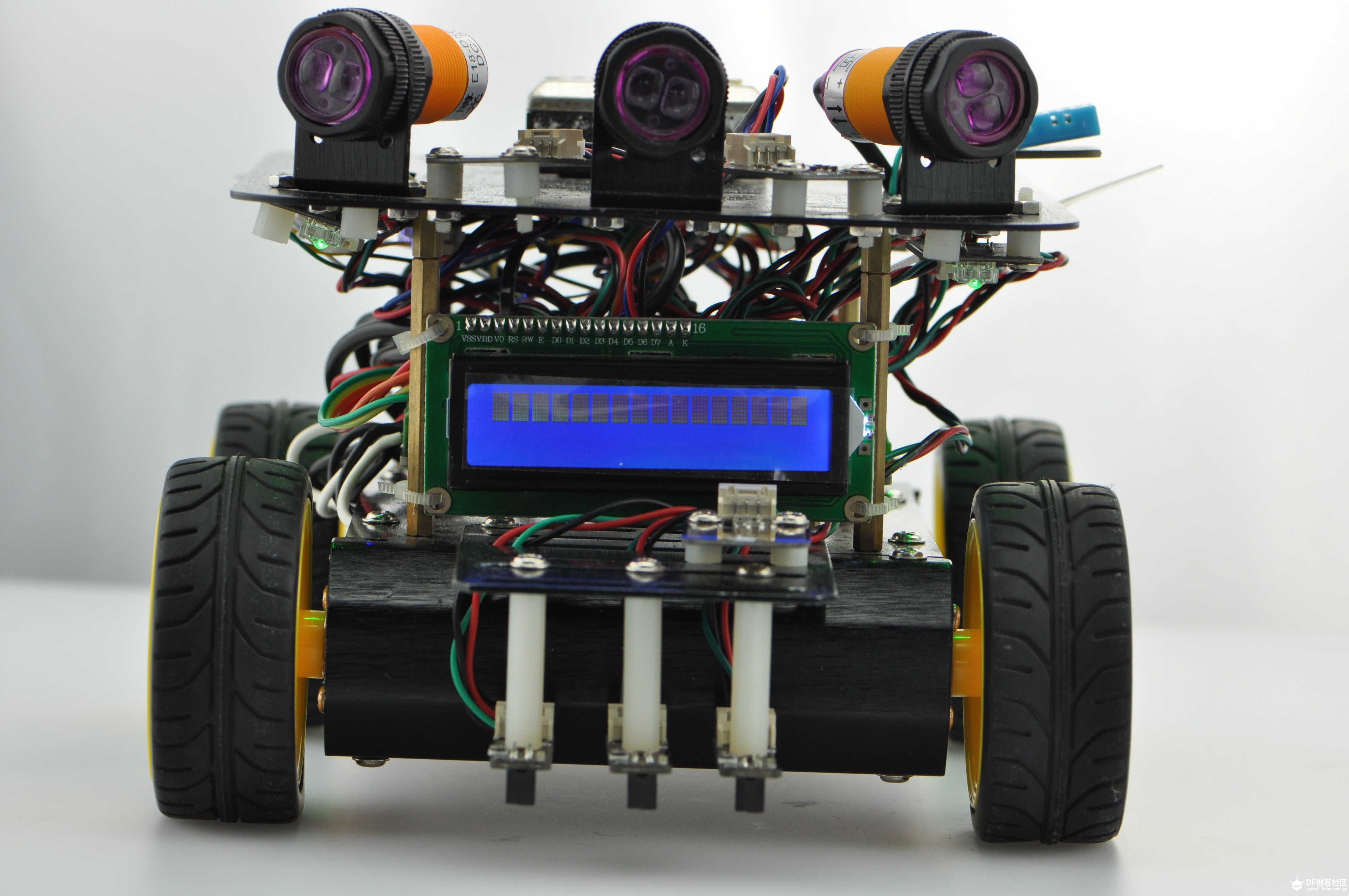 使用部件:数字触摸开关Touch、I2C LCD1602液晶模块、 SHARP 空气质量传感器 转接模块、Sharp GP2Y1010AU0F 空气质量传感器、 DHT11温湿度传感器、BMP180气压传感器、 ML8511 UV紫外线传感器 V1.0、LX1972环境光传感器 声光效果 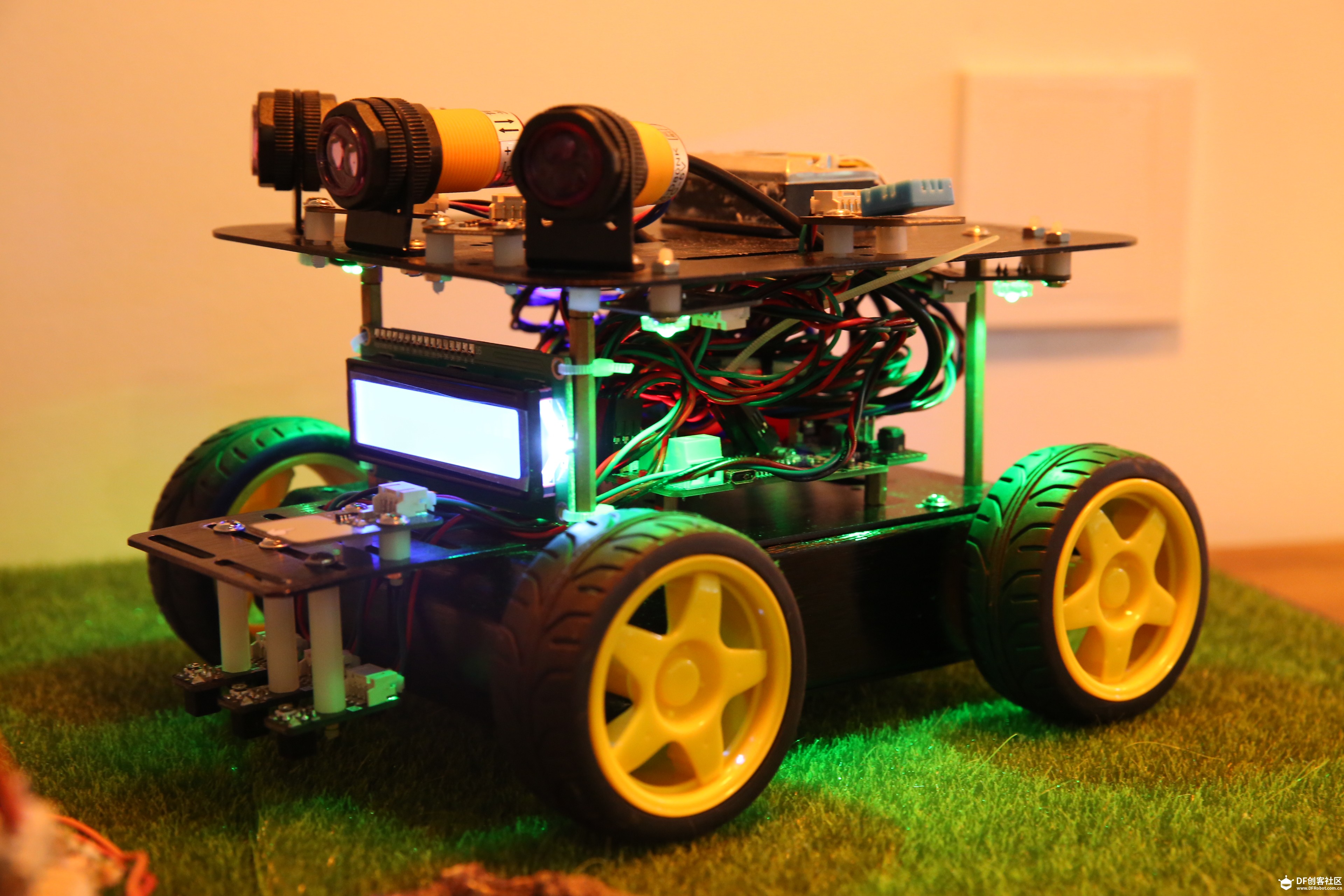 使用部件:数字食人鱼绿色LED发光模块*4 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶







