克里斯安德森在《创客》一书中写到,创客有四大基本工具,CNC,3D扫描仪,
3D打印 机和激光雕刻机,前三者已经趋于普及,唯独桌面级激光雕刻机却始终处于初级阶段。
这一次,我们革新了以往的用户体验,将传统的电脑端生成刀路,送入雕刻机雕刻的过程完全简化,加入此端拍照,彼端自动开始雕刻的黑科技,采用Intel Edison平台+OpenCV视觉运算来实现TP、OpenCV自动处理、全自动生成刀路以及输送至我们的雕刻机完成相应的自动调焦雕刻工作。
我们在Edison上通过预编译的Ubuntu系统来作为OpenCV的运行平台,使用脚本调用完成我们的预定目标
输入一张唯美的相片,轻击雕刻即可享受一键转换带来的轻松写意的用户体验
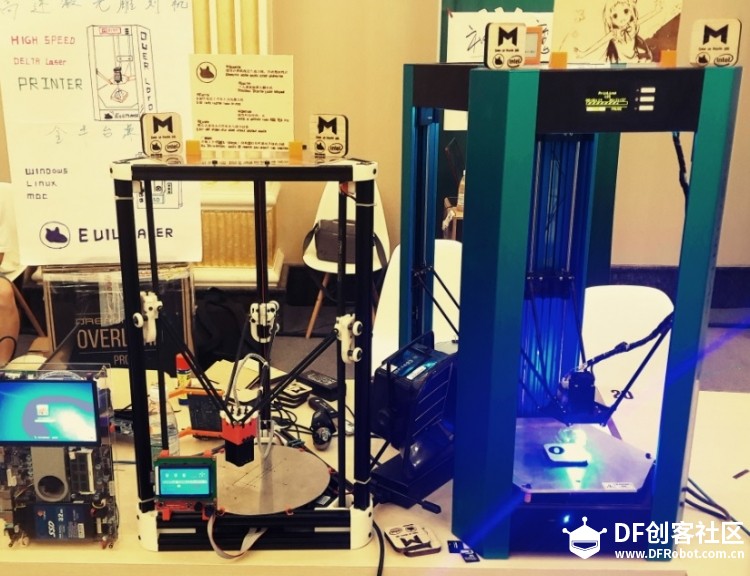
而现在,我们带来了全新的高速激光雕刻机,采用Delta急速并联臂架构,自动对焦,配有全自动刀路生成程式,雕刻速度相比其他同级别架构提升10-20倍,令以往繁杂的激光雕刻准备工作变得轻松写意,飞掣凛然,使得桌面级激光雕刻机成为可能。
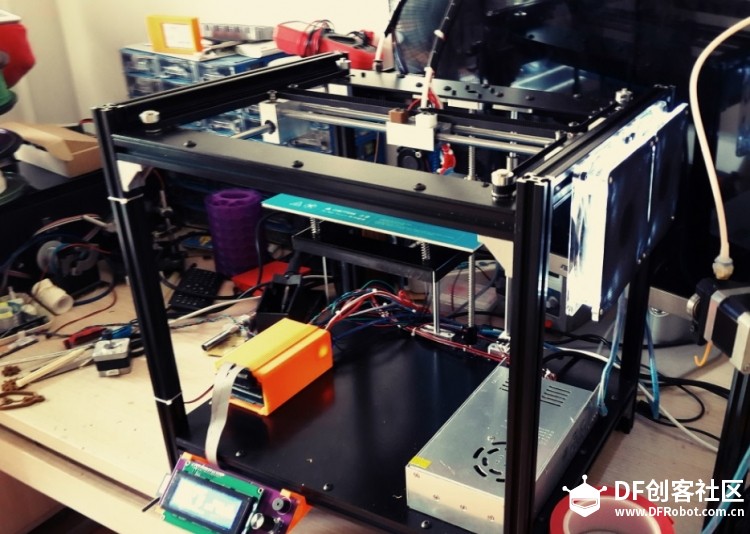
我们团队曾参与多款国内顶级桌面级激光雕刻方案研发,在以往开发的精准架构CoreXY,H-Bot等驱动方案基础上加以革新,借此次中美Maker创意**为契机,开发了这款以速度便捷为核心方向的机器,并且匹配有普通Delta以及其他3D打印机的改造方案,每个人都可以在自己的3D打印机基础上加装我们的设备方案使其变为高速桌面级激光雕刻机,让创意在Maker手中更加具现化,游刃有余。
Arduino 来使用,也就是所谓的Edison as Arduino,这是非常浪费的事情。所以我更推荐把Edsion作为Liunx开发板来使用。sudo fdisk -lu
sudo fdisk /dev/sdb
sudo mkfs -t ext4 /dev/sdb 复制代码 fw_setenv myrootfs_emmc 'PARTUUID=012b3303-34ac-284d-99b4-34e03a2335f4'
fw_setenv myrootfs '/dev/mmcblk1p1'
fw_setenv do_boot_emmc 'setenv myrootfs ${myrootfs_emmc}; run do_boot'
fw_setenv do_boot_sdcard 'setenv myrootfs ${myrootfs_sdcard}; run do_boot'
复制代码 sudo apt-get install build-essential libgtk2.0-dev libavcodec-dev libavformat-dev libjpeg62-dev libtiff4-dev cmake libswscale-dev libjasper-dev 复制代码 #include<opencv2/opencv.hpp>
#include<opencv2/highgui/highgui_c.h>
#include<opencv2/imgproc/imgproc.hpp>
#include<iostream>
#include<fstream>
using namespace std;
using namespace cv;
int main(int argc,char *argv[])
{
int camera_id = 0;
ofstream outfile;
outfile.open("Gcode.txt");
if(argc>1)
{
camera_id = atoi(argv[1]);
}
cv::VideoCapture cap(camera_id);
if(!cap.isOpened())
{
printf("failed to open the camera with id %d.\n",camera_id);
return -1;
}
cv::Mat frame;
cap>>frame;
imwrite("camera_captured.png",frame);
//Mat img = imread(argv[1],CV_LOAD_IMAGE_GRAYSCALE);
Mat edges;
cvtColor(frame, edges, CV_BGR2GRAY);
//blur(edges,edges,Size(3,3));
//Canny(edges,edges,50,100,3);
/* MatIterator_<uchar> grayit, grayend;
for(grayit = edges.begin<uchar>(),grayend = edges.end<uchar>(); grayit != grayend; ++grayit)
{
if(*grayit==255)
{
*grayit = 0;
}
else
{
*grayit = 255;
}
//outfile<<(int)((uchar)(*grayit))<<endl;
}*/
//Mat roi(edges, Rect(10,10,100,100));
/*
640*480
*/
Mat roi(edges,Rect(0,0,640,480));
/*
255:
G1 X10 Y10(移动到起始位置)
M106(开启激光)
G1 X10 Y30(雕刻从10-30之间的路径)
M107(关闭激光)
G1 X10 Y40(移动到下一个位置)
M106
G1 X10 Y50
M107
*/
/*******************************************************/
#define GrayScale 255 //frame 灰度级
int width = roi.cols;
int height = roi.rows;
int pixelCount[GrayScale]={0};
float pixelPro[GrayScale]={0};
int pixelSum = width * height, threshold = 0;
uchar* data = (uchar*)roi.ptr<uchar>();
//统计每个灰度级中像素的个数
for(int i = 0; i < height; i++)
{
for(int j = 0;j < width;j++)
{
pixelCount[(int)data[i * width + j]]++;
}
}
//计算每个灰度级的像素数目占整幅图像的比例
for(int i = 0; i < GrayScale; i++)
{
pixelPro[i] = (float)pixelCount[i] / pixelSum;
}
//遍历灰度级[0,255],寻找合适的threshold
float w0, w1, u0tmp, u1tmp, u0, u1, deltaTmp, deltaMax = 0;
for(int i = 0; i < GrayScale; i++)
{
w0 = w1 = u0tmp = u1tmp = u0 = u1 = deltaTmp = 0;
for(int j = 0; j < GrayScale; j++)
{
if(j <= i) //背景部分
{
w0 += pixelPro[j];
u0tmp += j * pixelPro[j];
}
else //前景部分
{
w1 += pixelPro[j];
u1tmp += j * pixelPro[j];
}
}
u0 = u0tmp / w0;
u1 = u1tmp / w1;
deltaTmp = (float)(w0 *w1* pow((u0 - u1), 2)) ;
if(deltaTmp > deltaMax)
{
deltaMax = deltaTmp;
threshold = i;
}
}
/***********************************************/
MatIterator_<uchar> grayit, grayend;
for(grayit = roi.begin<uchar>(),grayend = roi.end<uchar>(); grayit != grayend; ++grayit)
{
if(*grayit<threshold)
{
*grayit = 0;
}
else
{
*grayit = 255;
}
//outfile<<(int)((uchar)(*grayit))<<endl;
}
bool data_flag = false;
int x = 0,y = 0;
for(int i=0;i<roi.rows;++i)
{
uchar * p = roi.ptr<uchar>(i);
for(int j=0;j<roi.cols;++j)
{
y = -i+240;
x = j-320;
if(p[j]==0 && data_flag==false)
{
data_flag=true;
outfile<<"G"<<1<<" ";
outfile<<"X"<<x<<" ";
outfile<<"Y"<<y<<endl;
outfile<<"M"<<106<<endl;
}
else if(p[j]==0 && data_flag==true)
{
}
else if(p[j]==255 && data_flag==true)
{
data_flag=false;
x=x-1;
outfile<<"G"<<1<<" ";
outfile<<"X"<<x<<" ";
x=x+1;
outfile<<"Y"<<y<<endl;
outfile<<"M"<<107<<endl;
}
//outfile<<(int)(p[j]);
/* outfile<<"{";
outfile<<i;
outfile<<",";
outfile<<j;
outfile<<":";
if(p[j]==255)
outfile<<0;
else
outfile<<"#";
outfile<<"}"<<endl;*/
}
data_flag=false;
}
outfile.close();
imwrite("converted.png",roi);
return 0;
}
复制代码 EvilMaker团队简介:
数年前,我们与周围创意无穷,效率至上的小伙伴组建了EvilMaker团队,拥有无限的创造力和***,善于迸发出令人意想不到的创意,精准可靠的完成项目,他们有些专注于EDA设计,有些专注于机械工程,工业设计,跨平台程序撰写,后期特效,美工布局,相互之间都是志同道合的挚友。正是因为对这些无上的热情和追求,才让我们相聚在一起,思维在一起,制造在一起,未来,我们将有无穷种可能。
When dark come to morning light , EvilMaker is about time to arrive。黑暗降临,是泼染了黎明,还是卷走了血雨腥风,我只知道有些人正在创造不为人知的创造者










 沪公网安备31011502402448
沪公网安备31011502402448
 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶








