|
51522| 28
|
[项目] 一起来造个MOBBOB——3D打印机器人 |

本帖最后由 hnyzcj 于 2015-10-23 21:11 编辑  http://www.tudou.com/programs/view/lsRnacDASY0/ 澳大利亚有一位视频游戏开发者KevinChan,他花了一辈子时间开发的机器人,最近几年又开始使用3D打印。近日,他展示了自己设计的一款非常独特的3D打印机器人。这个机器人的闪亮之处在于,它的主体和控制中心是一部普通的智能手机!KevinChan把自己创造的这个机器人称为“MobBob。” 不过今天,这么好玩的东西怎么也要把它弄出来玩玩。
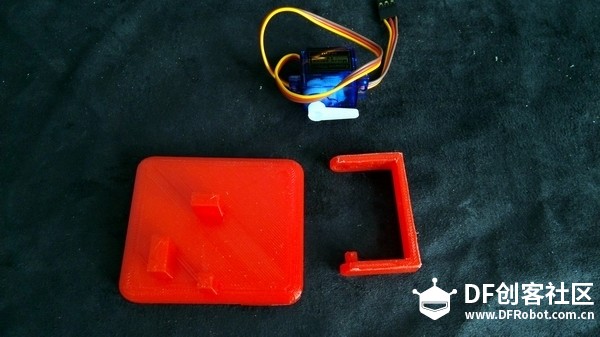
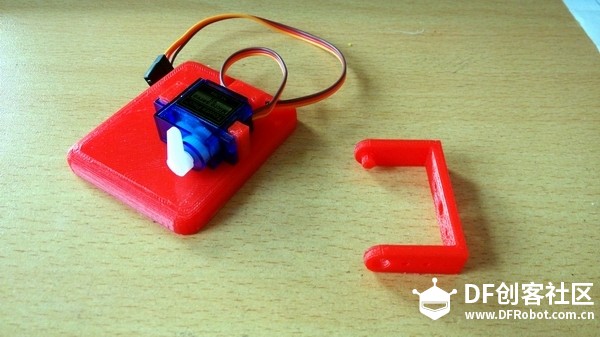
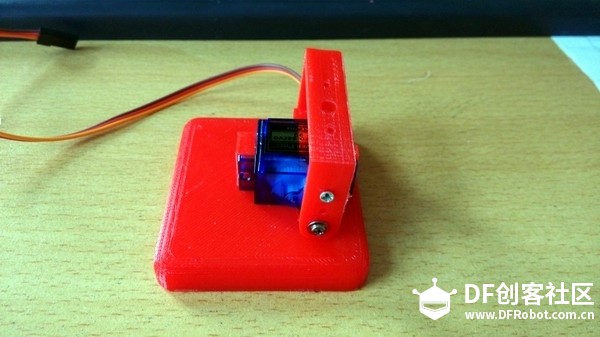
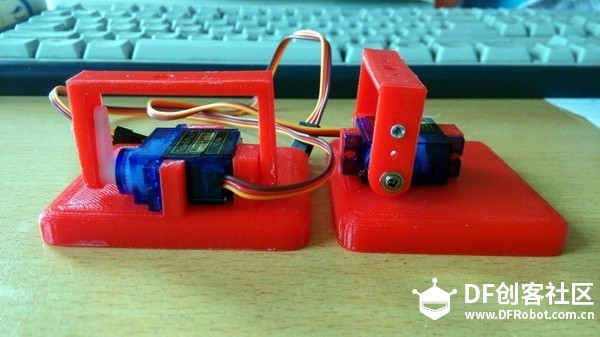
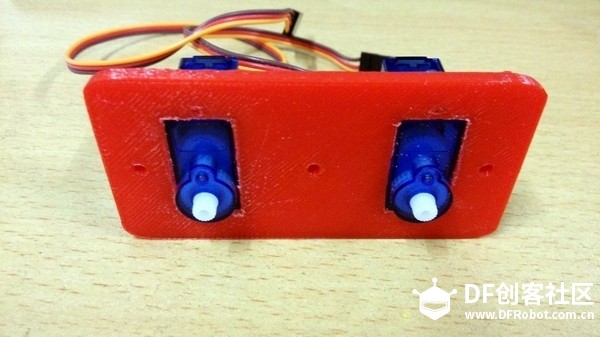
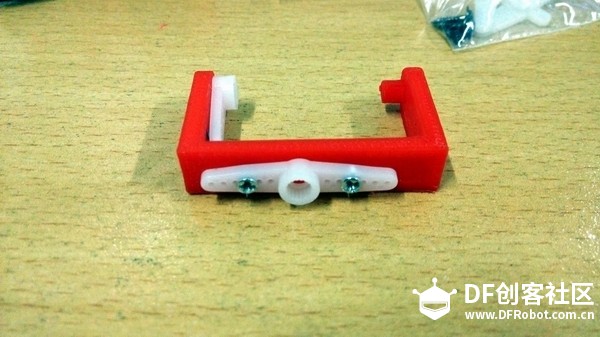
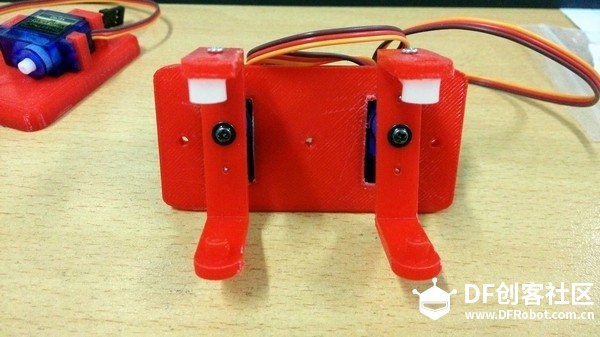
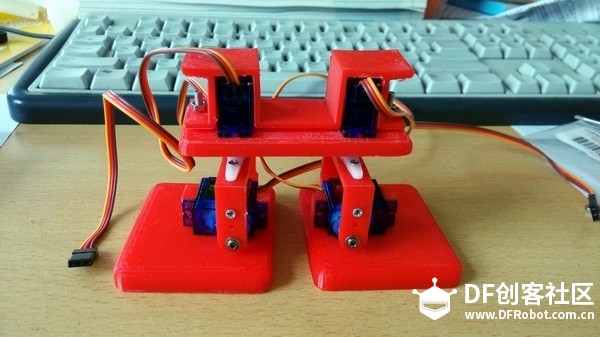
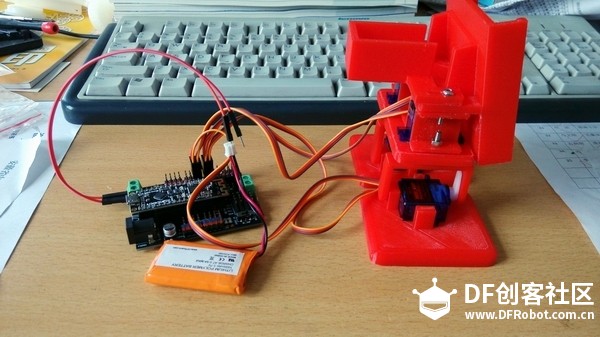
模型文件打印设置如下: Quality: Layer height:0.15 Shell thickness:0.8 Fill Bottom/top thickness:0.4 Fill density:50 Support: Support type:touching buildplate Platform adhesion type:brim 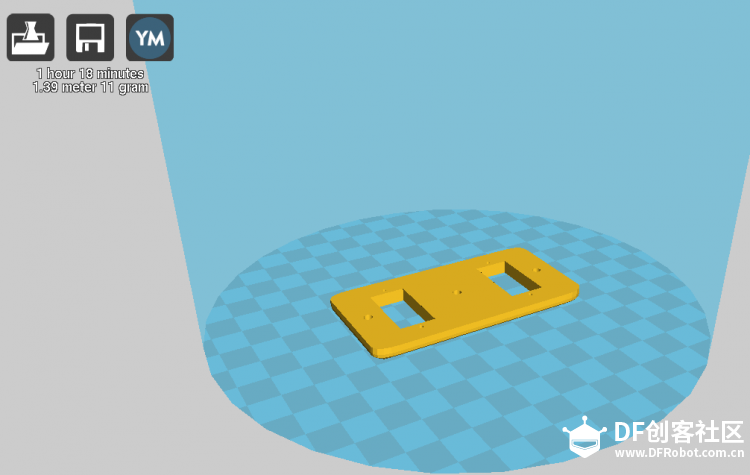 膝关节 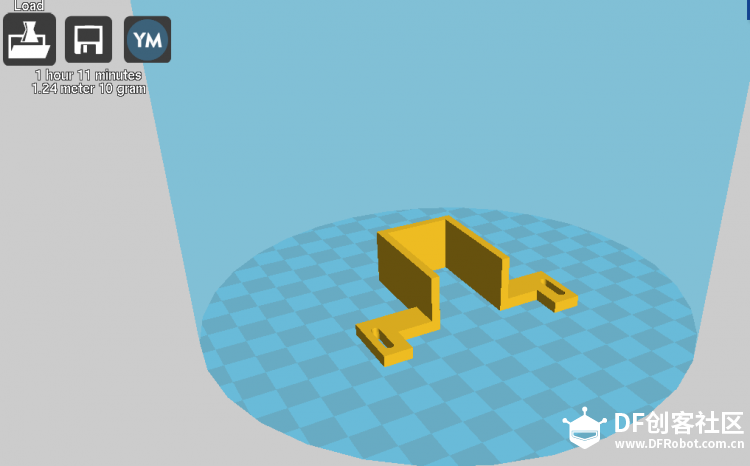 电池槽 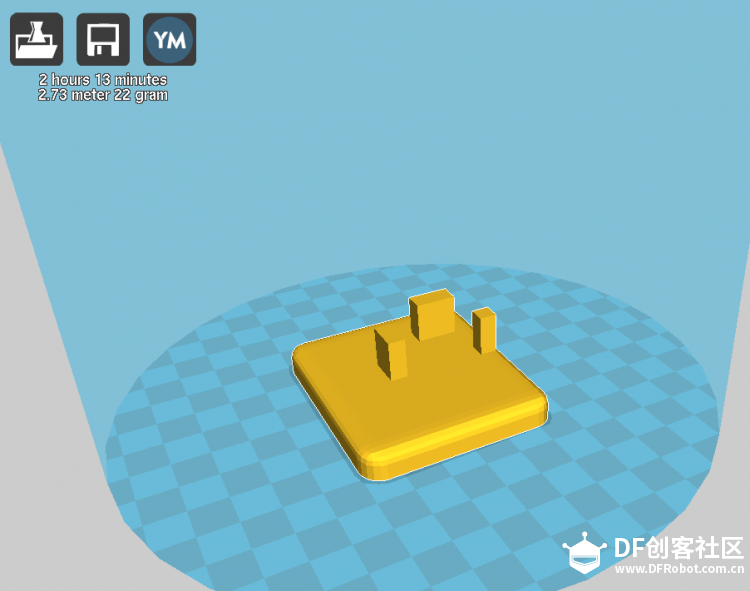 左脚 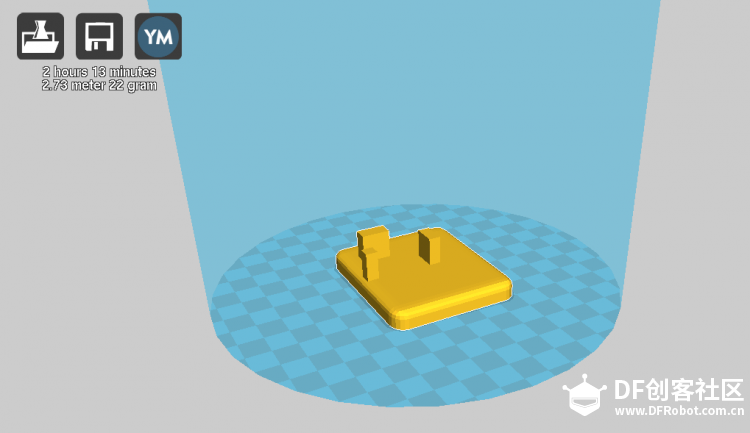 右脚  腿  手机槽(尺寸设置请实际测量自己的手机宽度)  舵机卡槽(请按上图方位进行打印) 三、部件组装:  器件合集  拿出舵机1个脚部和1条脚部件 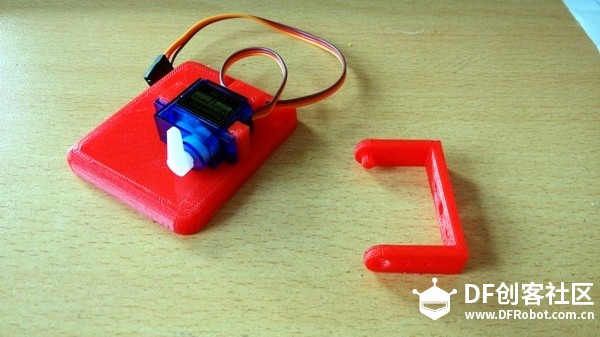 脚部组装(请尽量将舵盘按90度安装) 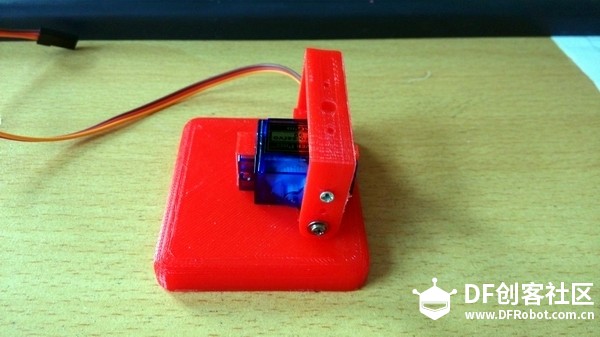 腿部安装(在腿部上方安装长舵盘如图所示,带舵盘的为机器人正面,以下图为例安装腿部) 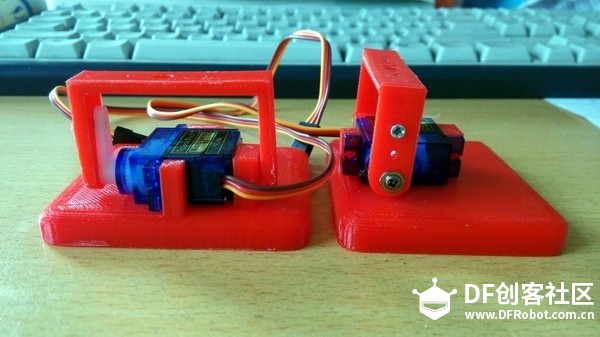 腿部正面侧面图 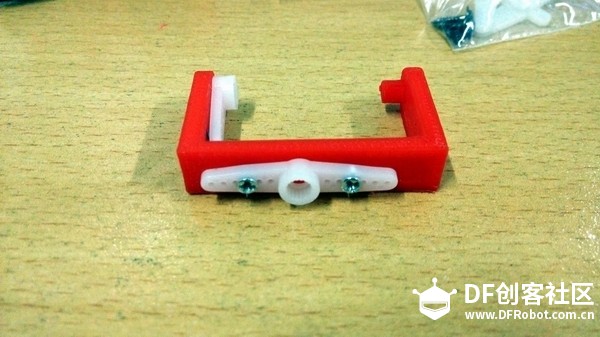 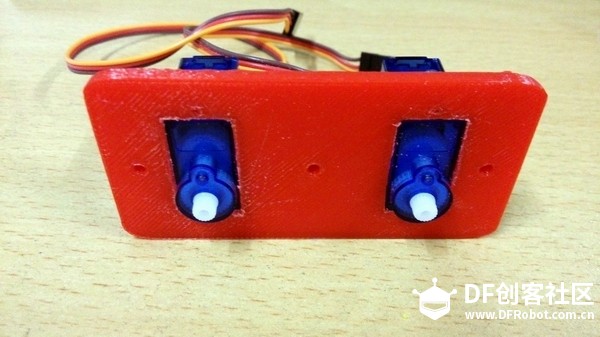 膝部安装(将舵机头朝下,安装入膝部注意白色转动轴部分是机器人正面)  先将腿部与膝盖部分固定好,如上图所示  将上部中的膝腿组合体分别于左右脚组装起来如上图 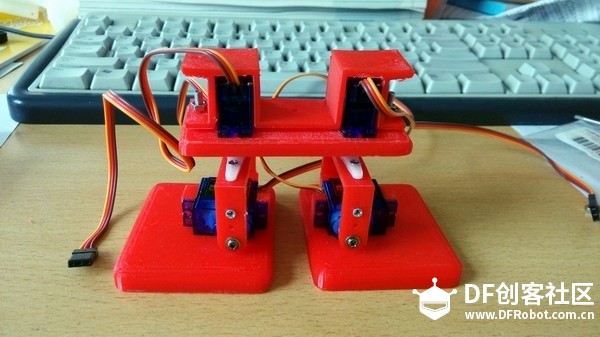 再将舵机卡槽卡在膝部舵机上方,用M3*15螺丝固定。  在以上组合体上依次增加手机卡槽和电池卡槽用用M3*15螺丝固定  四、电路连接 先将Bluno nano和Nano io 拓展板叠加(注意Bluno nano 针脚的方向),四个舵机分别对应数字口分布:左膝舵机D6,左脚舵机D7,右膝舵机D8,右脚舵机D9。Servo power分别接3.7V电池的正负极为4个舵机供电。9V电源通过转接头与拓展板连接供电。.  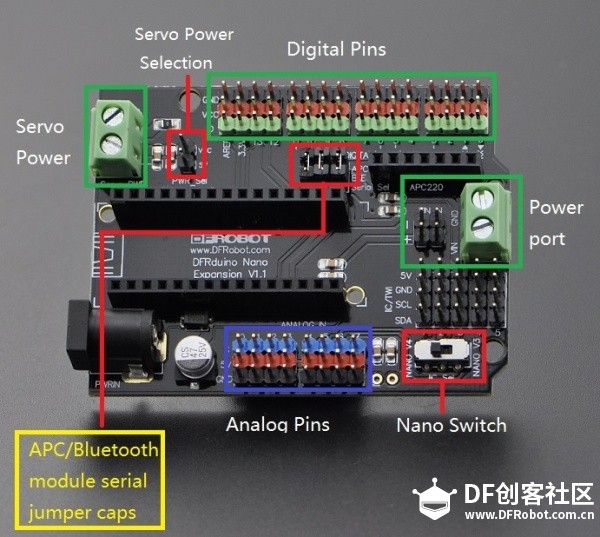 电路部分的连接到此就结束了。最后别忘记将你的手机安防到手机插槽中。 五、程序代码和手机APP 在Bluon nanao中刷入以下代码,再在手机上安装MOBOBO手机APP软件。那么激动人心的时刻到来了,开启手机蓝牙,运行手机APP,选项如下所示 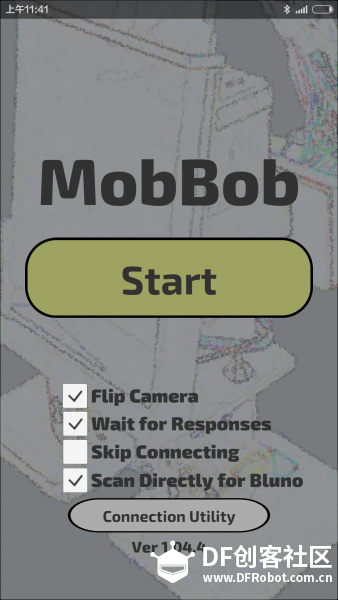  如果蓝牙配对成功,在Bluno nano上的蓝牙指示灯会亮起。 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed


 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶


 论坛的表情好搞笑
论坛的表情好搞笑






 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 版主限定
版主限定
 牛X认证
牛X认证
 创作达人
创作达人
 小蘑菇
小蘑菇
 蘑菇人
蘑菇人
 蘑菇老人
蘑菇老人
 荣誉教师
荣誉教师
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 ARD DAY
ARD DAY
 编辑选择奖
编辑选择奖
 创客造
创客造
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖






