|
29335| 16
|
[讨论] 红外火焰传感器使用感想 |
我肥来啦 ,这次制作的红外火焰传感器,又来和大家和交流啦。 ,这次制作的红外火焰传感器,又来和大家和交流啦。 准备工作: 准备工作:1、一颗敢想敢做的心(JUST DO IT),永恒不变哦  坚持,坚持,再坚持。 坚持,坚持,再坚持。2、Arduino Uno R3及其家属:USB下载线~。 3、跳线少许。反正没数多少,这么多应该是够了   4、470Ω电阻两只.  5、蜂鸣器一个   6、LED灯(红,随你喜欢用啥色用啥色)   7、三极管一个(我选用的是PNP)  8、本次主角:红外火焰传感器  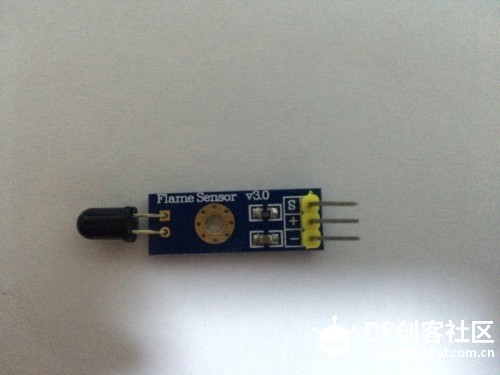 部分元件原理: 1、有源蜂鸣器(本次使用):这里的“源”不是指电源,而是指震荡源。内含多个震荡电路,一通电就开始蜂鸣。 2、pnp三极管:一般单片机的IO口驱动能力不足以使蜂鸣器发出声音,所以为了让蜂鸣器发出声音,就通过三极管放大驱动电流。 3、红外传感器:由红外接收管图中探头部分(黑色像灯泡的),470Ω电阻,还有一个滤波电容组成。 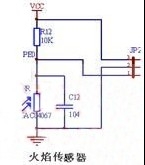 刚开始看到S我是很纠结的,后来猜想是SENSOR意思(也就是传感器),所以肯定是让我们用来探测红外接线管变化产生的数值。 火焰传感器原理: 功能说明: 火焰传感器是机器人专门用来搜寻火源的传感器,当然火焰传感器也可以用来检测光线的亮度,只是本传感器对火焰特别灵敏。火焰传感器利用红外线对对火焰非常敏感的特点,使用特制的红外线接受管来检测火焰,然后把火焰的亮度转化为高低变化的电平信号,输入到中央处理器中,中央处理器根据信号的变化做出相应的程序处理。 功能用途: 远红外火焰传感器可以用来探测火源或其它一些波长在700纳米~1000纳米范围内的热源。在机器人比赛中,远红外火焰探头起着非常重要的作用,它可以用作机器人的眼睛来寻找火源或足球。利用它可以制作灭火机器人、足球机器人等。 原理介绍: 远红外火焰传感器能够探测到波长在700纳米~1000纳米范围内的红外光,探测角度为60,其中红外光波长在880纳米附近时,其灵敏度达到最大。远红外火焰探头将外界红外光的强弱变化转化为电流的变化,通过A/D转换器反映为0~255范围内数值的变化。外界红外光越强,数值越小;红外光越弱,数值越大。 一般注意事项: 1、将机器人上光敏传感器取下,然后将远红外火焰传感器直接接在光敏接口上。 2、远红外火焰传感器的插针是有极性的,安装时将红线接在主板上画有“+”的位置;如在使用时无反应,只要将传感器反插就可以了。 3、远红外火焰探头的工作温度为-25摄氏度~85摄氏度,在使用过程中应注意火焰探头离火焰的距离不能太近,以免造成损坏 电路连接方式: 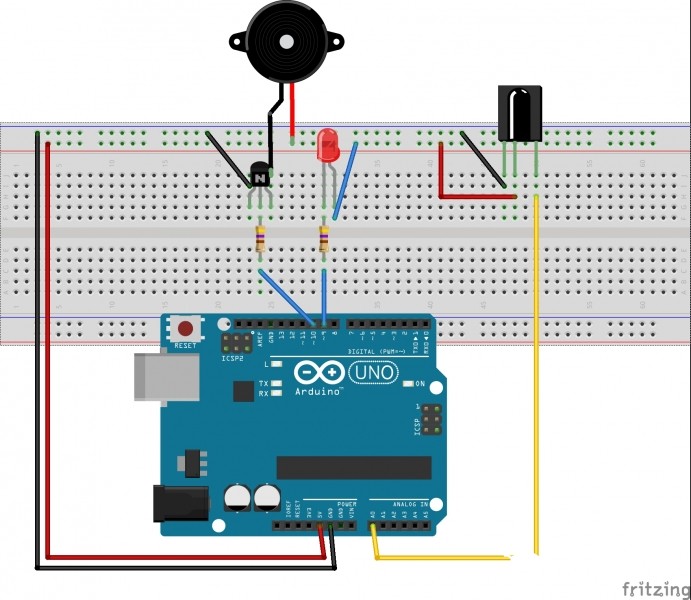 哈哈,为了让大家更容易参考(找错误),我就用软件画了接线图。 哈哈,为了让大家更容易参考(找错误),我就用软件画了接线图。实际电路如图: 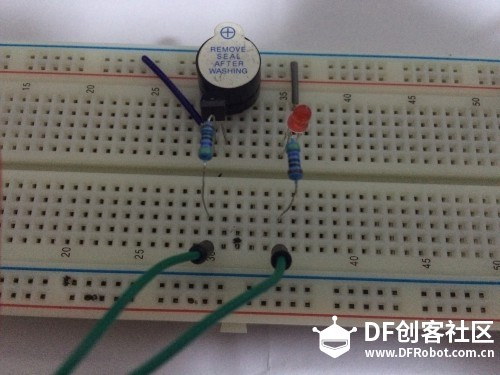 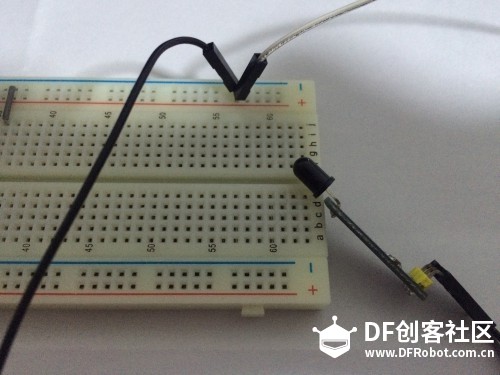 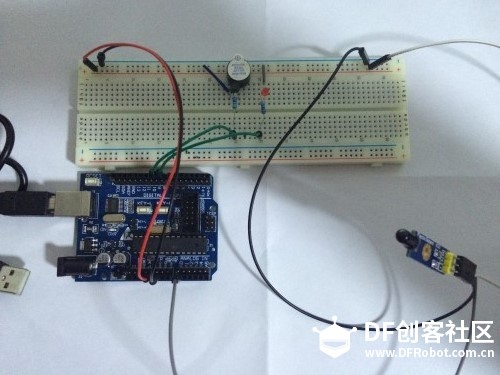 接好后就开始像个理工狗打代码了: 这次做了这个又有了一些其他的收获,  ,因为红外火焰传感器对光源也敏感,所以在制作过程中,我用灯光代替了烛光,也相对安全(不会告诉你,是因为房间太乱和太懒的)。并且在实验的过程中,发现不同的光引起蜂鸣器鸣响距离不同,白光最强,暖光最远,其次是自然光(又多知道了,望大家一起鉴定鉴定。创客制作项目肯定不仅仅在于其本身,而是要更多地去应用起来,MAKE A DIFFERENCE TO THE LIFE~当然更有想法的可以做一些浪漫的事(表白女生什么的(小心有危险))。让制作成为一种乐趣。 ,因为红外火焰传感器对光源也敏感,所以在制作过程中,我用灯光代替了烛光,也相对安全(不会告诉你,是因为房间太乱和太懒的)。并且在实验的过程中,发现不同的光引起蜂鸣器鸣响距离不同,白光最强,暖光最远,其次是自然光(又多知道了,望大家一起鉴定鉴定。创客制作项目肯定不仅仅在于其本身,而是要更多地去应用起来,MAKE A DIFFERENCE TO THE LIFE~当然更有想法的可以做一些浪漫的事(表白女生什么的(小心有危险))。让制作成为一种乐趣。JUST DO IT!! |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed


 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶










