|
6002| 1
|
[资讯] 服务机器人产业爆发在即,AI技术促智能升级 |
|
承接上文 服务机器人相比工业(专业)机器人,面对的工作环境是未知的,存在很多不确定性,所以,必须要对周围的环境有高效的感知、识别、理解、判断及行动能力。 机器人想要拥有高效的感知、识别、理解等能力,离不开这些关键技术的辅助和帮助。 机器人常见的三个通用的技术层:定位导航、人机交互和环境交互技术。 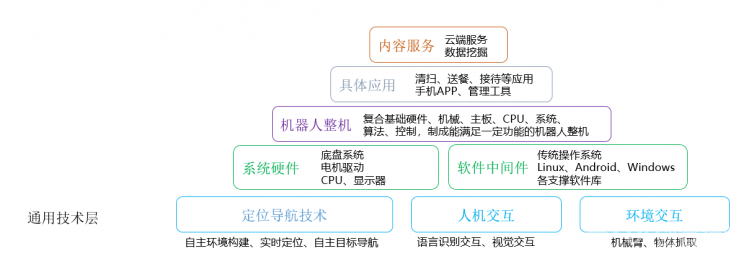 首先,来了解一下定位导航技术。 机器人想要完成自主定位导航,就必须拥有自主完成地图构建,精准识别每一个障碍物,并进行及时有效规避的能力。同时,还要能清楚自身所在位置及坐标,反馈给上层应用,协助完成定位导航。 所以,这就涉及到机器人的感知能力,需要有“眼睛”(如:激光雷达)等来帮助机器人感知周围环境,构建有效的地图数据,配合相应算法,完成运算,实现自主定位导航。  激光雷达“眼中”的世界 自主定位导航技术按照所实现的功能进行划分的话,可包含如下内容: 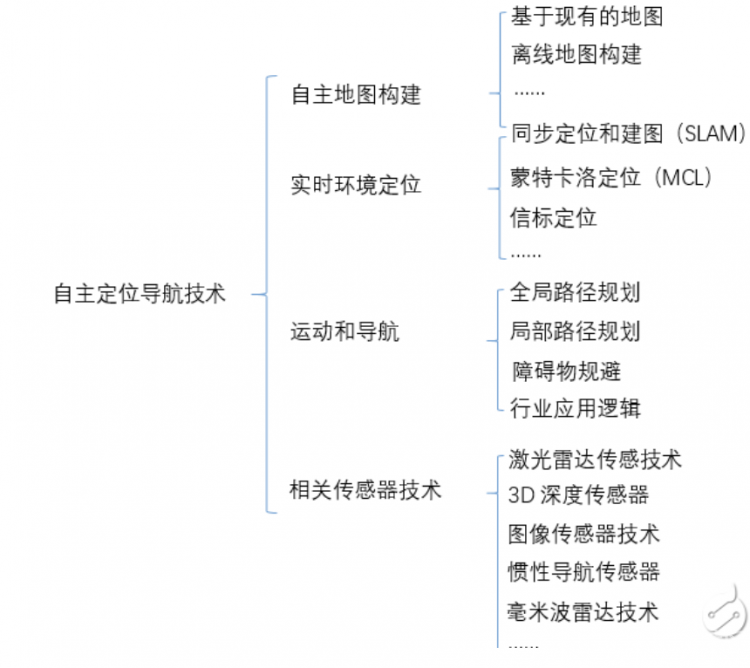 每个部分在实际工作当中是紧密联系在一起的,下图展示了一个典型的自主定位导航系统内部各组件的框架: 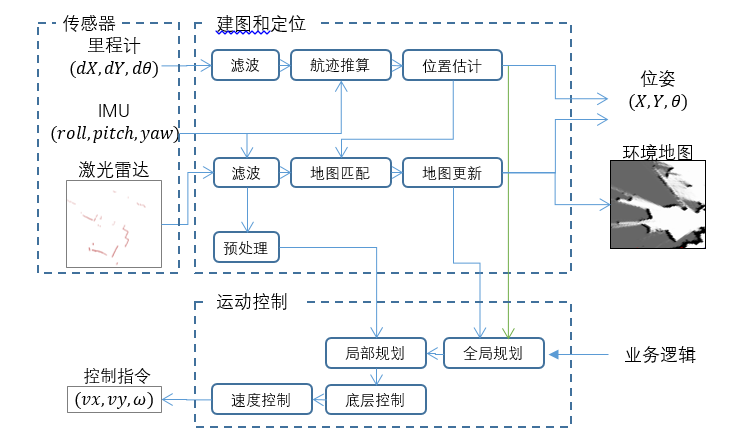 目前,市面上常见的用来辅助机器人完成自主定位导航的技术就是激光SLAM和VSLAM,两者各有优点。 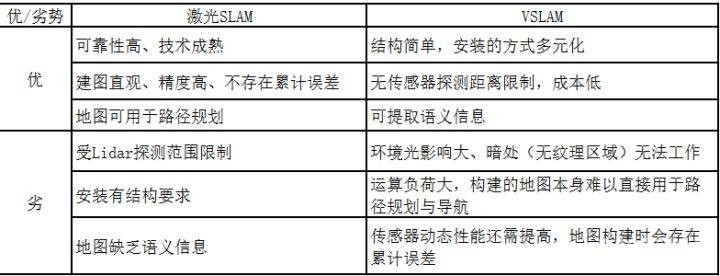 由于视觉方案受环境光限制较多,而激光雷达可以不受光线影响,实时测量周围物体和障碍物的距离,再加上近几年激光雷达成本逐渐下降,被认为是目前最具优势的感知方案。 未来,多传感器的融合必然也是大势所趋。融合来自多个传感器的感知数据(如:超声波、防跌落、防碰撞传感去、深度摄像头等),以产生更可靠、准确、全面的信息,精确地反映检测对象的特性,消除信息的不确定性,提高信息的可靠性。  下面,我们来说说人机交互技术。 机器人在拥有基础的自主定位导航技术之后,想要进一步发挥自身作用,还需要拥有人机交互的能力。人机交互技术能让机器人进一步了解人类,了解用户诉求,从而为用户提供更个性化的服务。 目前,人机交互技术主要包含语音识别、语义理解、人脸识别、图像识别、体感/手势交互等技术。通过语音识别、合成、理解等技术,实现更精准的营销和专属服务。通过人脸识别,可帮助商家精准得识别用户,并主动与用户打招呼,提升用户体验…… 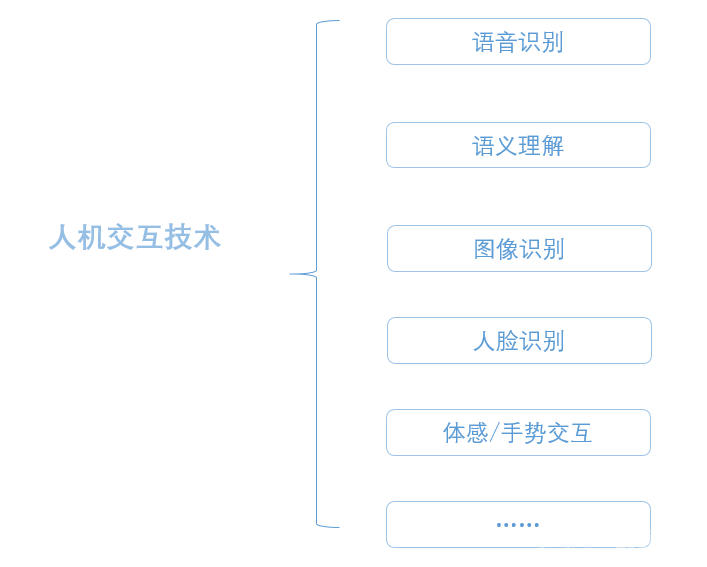 人机交互技术的成熟,使其得到了很好的商业落地应用,在很多的AI平台、机器人及C端产品中都能找到相应应用案例。 最后,就是环境交互技术。 环境交互技术就是解决机器人除了运动之外的其他动作,比如机械臂、物体抓取等。这就涉及到机器人怎么去抓?怎么样去控制?以及怎么去操控? 机械臂涉及到机械、控制、计算机等,包含了机器人手指末端的利用、触觉控制等等,这就需要传感器来帮助识别。  在有了关键技术的辅助下,接下来就是产品类公司所要考虑的,如何找准用户核心需求,快速找准市场定位,铺货市场,让部分先行产品在“部分群体和市场率先应用”,进一步深入各个领域。 下一节,我们再来看看对于技术和产品类公司来说,需要把握哪些趋势和要点,以实现机器人激流勇进、突出重围,成为AI输出利器? 下一节,不见不散~ |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶







