|
18691| 3
|
[项目] 制作Arduino 超声波雷达 |
|
## 制作Arduino超声波雷达 接下来就要开始制作Arduino 超声波雷达了。你要准备好如下材料和工具: 超声波传感器×1 舵机×1 杜邦线导线若干 软件用的是arduino ide和processing 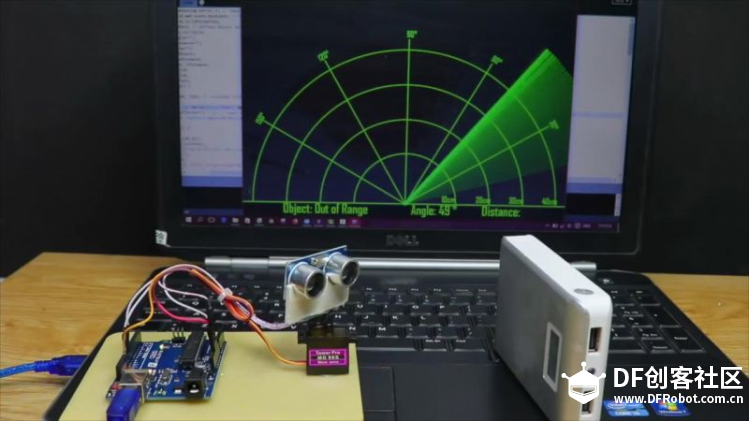 arduino IDE代码: [mw_shl_code=applescript,true]#include <Servo.h> const int trigPin = 10; const int echoPin = 11; long duration; int distance; Servo myServo; void setup() { pinMode(trigPin, OUTPUT); pinMode(echoPin, INPUT); Serial.begin(9600); myServo.attach(12); } void loop() { for(int i=15;i<=165;i++){ myServo.write(i); delay(30); distance = calculateDistance(); Serial.print(i); Serial.print(","); Serial.print(distance); Serial.print("."); } for(int i=165;i>15;i--){ myServo.write(i); delay(30); distance = calculateDistance(); Serial.print(i); Serial.print(","); Serial.print(distance); Serial.print("."); } } int calculateDistance(){ digitalWrite(trigPin, LOW); delayMicroseconds(2); digitalWrite(trigPin, HIGH); delayMicroseconds(10); digitalWrite(trigPin, LOW); duration = pulseIn(echoPin, HIGH); distance= duration*0.034/2; return distance; } processing代码: import processing.serial.*; // imports library for serial communication import java.awt.event.KeyEvent; // imports library for reading the data from the serial port import java.io.IOException; Serial myPort; // defines Object Serial // defubes variables String angle=""; String distance=""; String data=""; String noObject; float pixsDistance; int iAngle, iDistance; int index1=0; int index2=0; PFont orcFont; void setup() { size (1000, 720); // ***CHANGE THIS TO YOUR SCREEN RESOLUTION*** smooth(); myPort = new Serial(this,"COM6", 9600); // starts the serial communication myPort.bufferUntil('.'); // reads the data from the serial port up to the character '.'. So actually it reads this: angle,distance. orcFont = loadFont("AgencyFB-Bold-48.vlw"); } void draw() { fill(98,245,31); textFont(orcFont); // simulating motion blur and slow fade of the moving line noStroke(); fill(0,4); rect(0, 0, width, height-height*0.065); fill(98,245,31); // green color // calls the functions for drawing the radar drawRadar(); drawLine(); drawObject(); drawText(); } void serialEvent (Serial myPort) { // starts reading data from the Serial Port // reads the data from the Serial Port up to the character '.' and puts it into the String variable "data". data = myPort.readStringUntil('.'); data = data.substring(0,data.length()-1); index1 = data.indexOf(","); // find the character ',' and puts it into the variable "index1" angle= data.substring(0, index1); // read the data from position "0" to position of the variable index1 or thats the value of the angle the Arduino Board sent into the Serial Port distance= data.substring(index1+1, data.length()); // read the data from position "index1" to the end of the data pr thats the value of the distance // converts the String variables into Integer iAngle = int(angle); iDistance = int(distance); } void drawRadar() { pushMatrix(); translate(width/2,height-height*0.074); // moves the starting coordinats to new location noFill(); strokeWeight(2); stroke(98,245,31); // draws the arc lines arc(0,0,(width-width*0.0625),(width-width*0.0625),PI,TWO_PI); arc(0,0,(width-width*0.27),(width-width*0.27),PI,TWO_PI); arc(0,0,(width-width*0.479),(width-width*0.479),PI,TWO_PI); arc(0,0,(width-width*0.687),(width-width*0.687),PI,TWO_PI); // draws the angle lines line(-width/2,0,width/2,0); line(0,0,(-width/2)*cos(radians(30)),(-width/2)*sin(radians(30))); line(0,0,(-width/2)*cos(radians(60)),(-width/2)*sin(radians(60))); line(0,0,(-width/2)*cos(radians(90)),(-width/2)*sin(radians(90))); line(0,0,(-width/2)*cos(radians(120)),(-width/2)*sin(radians(120))); line(0,0,(-width/2)*cos(radians(150)),(-width/2)*sin(radians(150))); line((-width/2)*cos(radians(30)),0,width/2,0); popMatrix(); } void drawObject() { pushMatrix(); translate(width/2,height-height*0.074); // moves the starting coordinats to new location strokeWeight(9); stroke(255,10,10); // red color pixsDistance = iDistance*((height-height*0.1666)*0.025); // covers the distance from the sensor from cm to pixels // limiting the range to 40 cms if(iDistance<40){ // draws the object according to the angle and the distance line(pixsDistance*cos(radians(iAngle)),-pixsDistance*sin(radians(iAngle)),(width-width*0.505)*cos(radians(iAngle)),-(width-width*0.505)*sin(radians(iAngle))); } popMatrix(); } void drawLine() { pushMatrix(); strokeWeight(9); stroke(30,250,60); translate(width/2,height-height*0.074); // moves the starting coordinats to new location line(0,0,(height-height*0.12)*cos(radians(iAngle)),-(height-height*0.12)*sin(radians(iAngle))); // draws the line according to the angle popMatrix(); } void drawText() { // draws the texts on the screen pushMatrix(); if(iDistance>40) { noObject = "Out of Range"; } else { noObject = "In Range"; } fill(0,0,0); noStroke(); rect(0, height-height*0.0648, width, height); fill(98,245,31); textSize(25); text("10cm",width-width*0.3854,height-height*0.0833); text("20cm",width-width*0.281,height-height*0.0833); text("30cm",width-width*0.177,height-height*0.0833); text("40cm",width-width*0.0729,height-height*0.0833); textSize(40); text("Object: " + noObject, width-width*0.875, height-height*0.0277); text("Angle: " + iAngle +" °", width-width*0.48, height-height*0.0277); text("Distance: ", width-width*0.26, height-height*0.0277); if(iDistance<40) { text(" " + iDistance +" cm", width-width*0.225, height-height*0.0277); } textSize(25); fill(98,245,60); translate((width-width*0.4994)+width/2*cos(radians(30)),(height-height*0.0907)-width/2*sin(radians(30))); rotate(-radians(-60)); text("30°",0,0); resetMatrix(); translate((width-width*0.503)+width/2*cos(radians(60)),(height-height*0.0888)-width/2*sin(radians(60))); rotate(-radians(-30)); text("60°",0,0); resetMatrix(); translate((width-width*0.507)+width/2*cos(radians(90)),(height-height*0.0833)-width/2*sin(radians(90))); rotate(radians(0)); text("90°",0,0); resetMatrix(); translate(width-width*0.513+width/2*cos(radians(120)),(height-height*0.07129)-width/2*sin(radians(120))); rotate(radians(-30)); text("120°",0,0); resetMatrix(); translate((width-width*0.5104)+width/2*cos(radians(150)),(height-height*0.0574)-width/2*sin(radians(150))); rotate(radians(-60)); text("150°",0,0); popMatrix(); }[/mw_shl_code] 代码文件下载地址: |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶







