|
11776| 6
|
[项目] 这是追求极致还是死磕? |
2019-5-15版本一:  2019-6-2版本二:  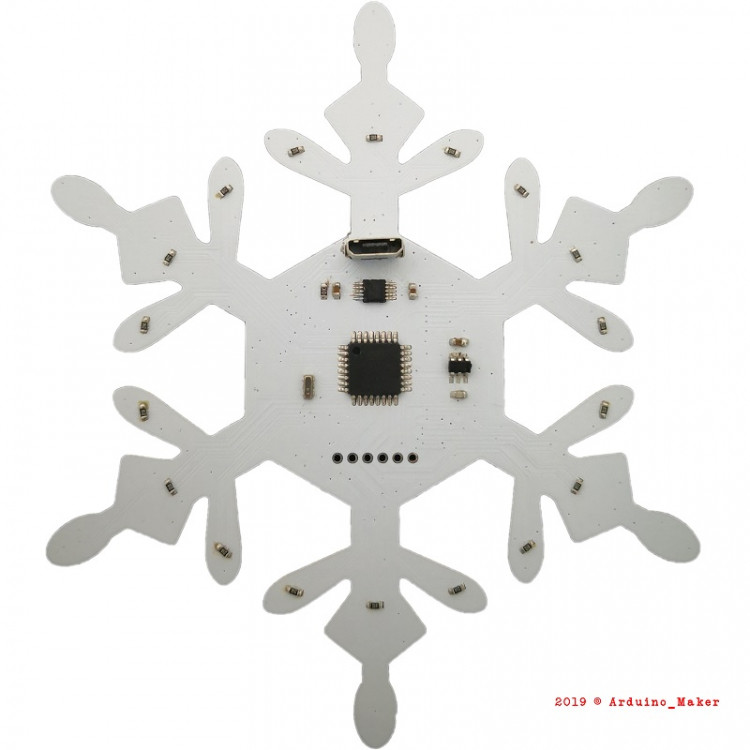 废话不多说,源码如下 [mw_shl_code=applescript,true]/* 2019 © Arduino_Maker */ #include <TimerOne.h> byte m = 0; byte Pvalue = 0; boolean BreatheFlag = true; byte ModeNumber = 0; //byte oldModeNumber = 0; boolean Touchflag = false; unsigned int Time1 = 0; unsigned int timex = 0; const byte Ring[5][6]={ {2,19,13}, {9,14,17}, {4,8,15,6,10,7}, {18,16,12}, {11,5,3} }; void setup() { Serial.begin(9600); for(int i=0;i<5;i++){ for(int j=0;Ring[j]!='\0';j++){ pinMode(Ring[j],OUTPUT); } } Timer1.initialize( 100000 ); Timer1.attachInterrupt( Timer2Interrupt ); } void Timer2Interrupt(void){ if((analogRead(A6) < 100) && (Touchflag==false)){ Touchflag = true; Time1 = millis(); ModeNumber = ModeNumber + 1; if(ModeNumber == 2) m = 0; if(ModeNumber == 7) ModeNumber = 0; //Serial.println(ModeNumber); } else if((analogRead(A6) > 100) && (Touchflag==true)){ Touchflag = false; timex = millis() - Time1; if(timex > 3000) ModeNumber = 0; } } void loop() { switch(ModeNumber){ case 0: Mode0(); break; case 1: Mode1(10); break; case 2: Mode2(100); break; case 3: Mode3(100); break; case 4: Mode4(100); break; case 5: Mode5(10); break; case 6: Mode6(60); break; default: break; } } void Mode0(void) { Ring_Run(0,false); Ring_Run(1,false); Ring_Run(2,false); Ring_Run(3,false); Ring_Run(4,false); } void Mode1(int Mytime) { analogWrite(Ring[4][0],Pvalue); analogWrite(Ring[4][1],Pvalue); analogWrite(Ring[4][2],Pvalue); if(BreatheFlag==true){ Pvalue = Pvalue + 1; if(Pvalue == 255) BreatheFlag = false; } if(BreatheFlag==false){ Pvalue = Pvalue - 1; if(Pvalue == 0) BreatheFlag = true; } delay(Mytime); } void Mode2(int Mytime) { switch(m){ case 0: Ring_Run(0,true); break; case 1: delay(4*Mytime); break; case 2: Ring_Run(1,true); break; case 3: delay(3*Mytime); break; case 4: Ring_Run(2,true); break; case 5: delay(2*Mytime); break; case 6: Ring_Run(3,true); break; case 7: delay(Mytime); break; case 8: Ring_Run(4,true); break; case 9: delay(4*Mytime); break; case 10: delay(4*Mytime); break; case 11: Ring_Run(4,false);break; case 12: delay(Mytime); break; case 13: Ring_Run(3,false);break; case 14: delay(2*Mytime); break; case 15: Ring_Run(2,false);break; case 16: delay(3*Mytime); break; case 17: Ring_Run(1,false);break; case 18: delay(4*Mytime); break; case 19: Ring_Run(0,false);break; case 20: delay(4*Mytime); break; case 21: delay(4*Mytime); break; default: break; } m = m + 1; if(m == 22) m = 0; } void Mode3(int Mytime) { Ring_Run(0,true); Ring_Run(1,true); Ring_Run(2,true); Ring_Run(3,true); Ring_Run(4,true); delay(Mytime); Ring_Run(0,false); Ring_Run(1,false); Ring_Run(2,false); Ring_Run(3,false); Ring_Run(4,false); delay(Mytime); } void Mode4(int Mytime) { Leaf_Run(2,false);Leaf_Run(0,true);delay(Mytime); Leaf_Run(0,false);Leaf_Run(1,true);delay(Mytime); Leaf_Run(1,false);Leaf_Run(2,true);delay(Mytime); } void Mode5(int Mytime) { digitalWrite(Ring[0][2],LOW);digitalWrite(Ring[0][0],HIGH);delay(Mytime); digitalWrite(Ring[0][0],LOW);digitalWrite(Ring[0][1],HIGH);delay(Mytime); digitalWrite(Ring[0][1],LOW);digitalWrite(Ring[0][2],HIGH);delay(Mytime); digitalWrite(Ring[0][2],LOW); digitalWrite(Ring[1][1],LOW);digitalWrite(Ring[1][0],HIGH);delay(Mytime); digitalWrite(Ring[1][0],LOW);digitalWrite(Ring[1][2],HIGH);delay(Mytime); digitalWrite(Ring[1][2],LOW);digitalWrite(Ring[1][1],HIGH);delay(Mytime); digitalWrite(Ring[1][1],LOW); digitalWrite(Ring[2][4],LOW);digitalWrite(Ring[2][5],LOW);digitalWrite(Ring[2][2],HIGH);digitalWrite(Ring[2][3],HIGH);delay(Mytime); digitalWrite(Ring[2][2],LOW);digitalWrite(Ring[2][3],LOW);digitalWrite(Ring[2][0],HIGH);digitalWrite(Ring[2][1],HIGH);delay(Mytime); digitalWrite(Ring[2][0],LOW);digitalWrite(Ring[2][1],LOW);digitalWrite(Ring[2][4],HIGH);digitalWrite(Ring[2][5],HIGH);delay(Mytime); digitalWrite(Ring[2][4],LOW);digitalWrite(Ring[2][5],LOW); digitalWrite(Ring[3][2],LOW);digitalWrite(Ring[3][0],HIGH);delay(Mytime); digitalWrite(Ring[3][0],LOW);digitalWrite(Ring[3][1],HIGH);delay(Mytime); digitalWrite(Ring[3][1],LOW);digitalWrite(Ring[3][2],HIGH);delay(Mytime); digitalWrite(Ring[3][2],LOW); digitalWrite(Ring[4][2],LOW);digitalWrite(Ring[4][0],HIGH);delay(Mytime); digitalWrite(Ring[4][0],LOW);digitalWrite(Ring[4][1],HIGH);delay(Mytime); digitalWrite(Ring[4][1],LOW);digitalWrite(Ring[4][2],HIGH);delay(Mytime); digitalWrite(Ring[4][2],LOW); } void Mode6(int Mytime) { Ring_Run(0,true); Ring_Run(4,true); digitalWrite(Ring[2][4],LOW);digitalWrite(Ring[2][3],HIGH);delay(Mytime); digitalWrite(Ring[2][3],LOW);digitalWrite(Ring[3][1],HIGH);delay(Mytime); digitalWrite(Ring[3][1],LOW);digitalWrite(Ring[2][2],HIGH);delay(Mytime); digitalWrite(Ring[2][2],LOW);digitalWrite(Ring[2][1],HIGH);delay(Mytime); digitalWrite(Ring[2][1],LOW);digitalWrite(Ring[3][0],HIGH);delay(Mytime); digitalWrite(Ring[3][0],LOW);digitalWrite(Ring[2][0],HIGH);delay(Mytime); digitalWrite(Ring[2][0],LOW);digitalWrite(Ring[2][5],HIGH);delay(Mytime); digitalWrite(Ring[2][5],LOW);digitalWrite(Ring[3][2],HIGH);delay(Mytime); digitalWrite(Ring[3][2],LOW);digitalWrite(Ring[2][4],HIGH);delay(Mytime); } void Ring_Run(byte n,boolean k) { if(k==true) switch(n){ case 0: for(int i = 0;i < 3;i++) digitalWrite(Ring[0],HIGH); break; case 1: for(int i = 0;i < 3;i++) digitalWrite(Ring[1],HIGH); break; case 2: for(int i = 0;i < 6;i++) digitalWrite(Ring[2],HIGH); break; case 3: for(int i = 0;i < 3;i++) digitalWrite(Ring[3],HIGH); break; case 4: for(int i = 0;i < 3;i++) digitalWrite(Ring[4],HIGH); break; default : break; } else switch(n){ case 0: for(int i = 0;i < 3;i++) digitalWrite(Ring[0],LOW); break; case 1: for(int i = 0;i < 3;i++) digitalWrite(Ring[1],LOW); break; case 2: for(int i = 0;i < 6;i++) digitalWrite(Ring[2],LOW); break; case 3: for(int i = 0;i < 3;i++) digitalWrite(Ring[3],LOW); break; case 4: for(int i = 0;i < 3;i++) digitalWrite(Ring[4],LOW); break; default : break; } } void Leaf_Run(byte n,boolean k) { if(k==true) switch(n){ case 0: digitalWrite(Ring[1][0],HIGH); digitalWrite(Ring[2][0],HIGH); digitalWrite(Ring[2][1],HIGH); digitalWrite(Ring[3][0],HIGH); digitalWrite(Ring[4][0],HIGH); break; case 1: digitalWrite(Ring[1][2],HIGH); digitalWrite(Ring[2][5],HIGH); digitalWrite(Ring[2][4],HIGH); digitalWrite(Ring[3][2],HIGH); digitalWrite(Ring[4][2],HIGH); break; case 2: digitalWrite(Ring[1][1],HIGH); digitalWrite(Ring[2][2],HIGH); digitalWrite(Ring[2][3],HIGH); digitalWrite(Ring[3][1],HIGH); digitalWrite(Ring[4][1],HIGH); break; default: break; } else switch(n){ case 0: digitalWrite(Ring[1][0],LOW); digitalWrite(Ring[2][0],LOW); digitalWrite(Ring[2][1],LOW); digitalWrite(Ring[3][0],LOW); digitalWrite(Ring[4][0],LOW); break; case 1: digitalWrite(Ring[1][2],LOW); digitalWrite(Ring[2][5],LOW); digitalWrite(Ring[2][4],LOW); digitalWrite(Ring[3][2],LOW); digitalWrite(Ring[4][2],LOW); break; case 2: digitalWrite(Ring[1][1],LOW); digitalWrite(Ring[2][2],LOW); digitalWrite(Ring[2][3],LOW); digitalWrite(Ring[3][1],LOW); digitalWrite(Ring[4][1],LOW); break; default: break; } } [/mw_shl_code] |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶







