|
5760| 1
|
[高级教程] 【经验】TFmini与舵机结合的机器人小车避障应用方案 |
|
1.试验设备及接线 1.1实验设备 • MiniQ 桌面机器人底盘  - 底盘直径:122mm - 轮子直径:42mm - 底盘高度:15mm - 兼容 Arduino 标准板及 Romeo 控制器固定孔 - 电机参数: • N20 电机电压:3-9V • 无负载转速:13000rpm • 50:1 减速箱 • 260rpm@6V • 40mA@6V • 360mA 堵转@6V • 10 盎司英寸扭矩@6V • Romeo 三合一 Arduino 兼容控制器  - 采用 Atmel Atmega328 单片机 - Arduino UNO bootloader - 完全兼容 Aruduino UNO 的端口布局 - 集成 APC220 无线数传和 DF-BluetoothV3(SKU:TEL0026)蓝牙模块接口 - 支持 5 组 I2C 总线接口 - 支持两路电机驱动,峰值电流 2A,4 个控制口使用跳线切换 - 外部输入电压范围:6V~20V - 更详细的参数介绍详见附录的网页地址。 • MiniQ 小车上层安装板  • Benewake TFmini 标版  TFmini 详细参数见 TFmini 使用说明。 • 9g 舵机  1.2接线 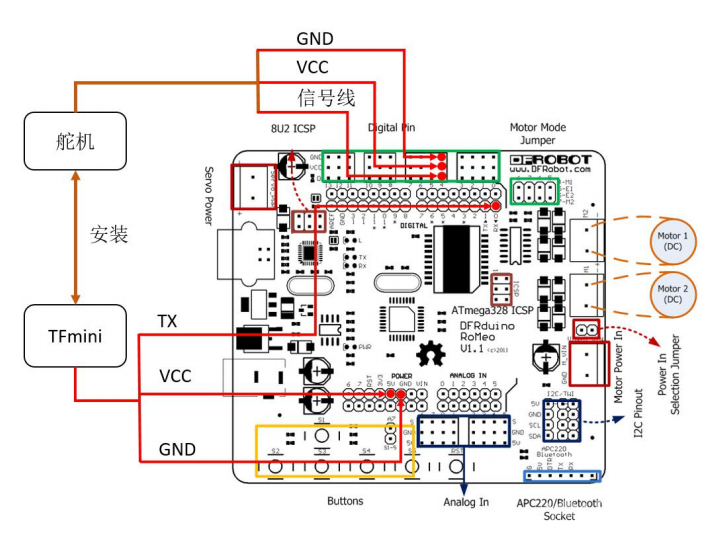 2.小车避障原理 小车启动后,小车开始向前运动。当雷达探测到前方阈值内有障碍物时,小车停止运动,开始左右扫描寻路。舵机搭载 TFmini 从 90°开始向 180°扫描,然后从 180°向 0°扫描。 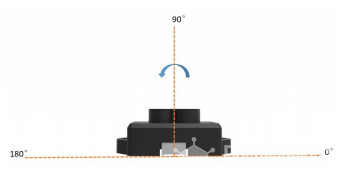 当扫描方向无障碍物时,小车向此方向转向,舵机回正到 90°。若从左至右扫描一圈都没有可以行进的路线,则小车后退,舵机回正。 逻辑流程图如下所示: 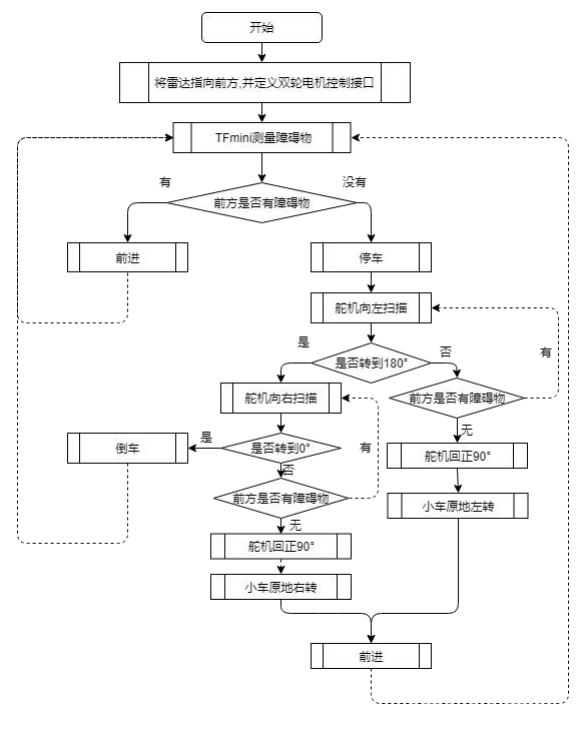 3.注意事项 • 当前避障原理模型只用来抛砖引玉,探索用 TFmini 避障的可行性,并不能大范围的适用于大规模的商业场景,如有需要,应以专业软件开发人员的代码为准。 • 搭载的外部电源过重时,会影响小车车轮的摩擦力,可能两个车轮的转速不一致,导致小车并不能按照轨迹行驶。 • 小车车轮在光滑地面有可能造成空转的现象,导致小车不能走直线。 • 如果单独对 TFmini 外部供电,则需将外部电源和控制板共地处理。 • 如果搭载更高复杂度的程序,要考虑芯片的能力,当前开发板在跑程序时已经发现会有卡顿的现象。 4.附录 4.1代码 #include <Servo.h> Servo myservo; int pos=90; //定义舵机角度 bool flag=true;//定义舵机转向 float dist_f;//定义 foward 方向距离 float dist_s;//定义 sideway 方向距离 int E1=5; //定义 M1 使能 int E2=6; //定义 M2 使能 int M1=4; //定义 M1 控制 int M2=7; //定义 M2 控制 int temp_distance =0; /** * 双轮停止 */ void brake(void){ digitalWrite(E1,LOW); //给 E1 低电平 digitalWrite(E2,LOW); //给 E2 低电平 } /** * 双轮前进 */ void advance(char a, char b){ analogWrite(E1,a); digitalWrite(M1,LOW); analogWrite(E2,b); digitalWrite(M2,LOW); } /** * 双轮后退 */ void back(char a, char b){ analogWrite(E1,a); digitalWrite(M1,HIGH); analogWrite(E2,b); digitalWrite(M2,HIGH); } /** * 左转 */ void turn_L(char a, char b){ analogWrite(E1,a); digitalWrite(M1,LOW); analogWrite(E2,b); digitalWrite(M2,HIGH); } /** * 右转 */ void turn_R(char a, char b){ analogWrite(E1,a); digitalWrite(M1,HIGH); analogWrite(E2,b); digitalWrite(M2,LOW); } /** * 读取 TFmini 测量结果 */ void getTFminiData(int* distance, int* strength) { static char i = 0; char j = 0; int checksum = 0; static int rx[9]; if(Serial.available()) { rx = Serial.read(); if(rx[0] != 0x59) { i = 0; } else if(i == 1 && rx[1] != 0x59) { i = 0; } else if(i == 8) { for(j = 0; j < 8; j++) { checksum += rx[j]; } /* if(rx[8] == (checksum % 256)) { *distance = rx[2] + rx[3] * 256; *strength = rx[4] + rx[5] * 256; }*/ *distance = rx[2] + rx[3] * 256; *strength = rx[4] + rx[5] * 256; i = 0; } else { i++; } } } void setup() { // put your setup code here, to run once: Serial.begin(115200); //舵机的插口在 4 myservo.attach(4); brake(); /* * 将雷达指向前方 */ myservo.write(pos); /* * 设置轮胎电机输出口 */ pinMode(4,OUTPUT); pinMode(5,OUTPUT); pinMode(6,OUTPUT); pinMode(7,OUTPUT); delay(10); } void loop() { /* * 读数一次 */ int distance = 0; int strength = 0; getTFminiData(&distance, &strength); while(!distance) { getTFminiData(&distance, &strength); Serial.print("Distance: "); Serial.print(distance); Serial.print("cm "); Serial.print("strength: "); Serial.println(strength); } /* * 设置 30CM 阈值 */ if(distance <= 30 && distance > 0){ temp_distance = distance; } delay(10); /* * 判断读数距离 * 如果度数距离小于阈值,则停车,开始向左向右扫描,直到扫描出有空隙可以走,然后车轮转弯,然后扫描器回正 * 如果读数距离大于阈值,则开车 */ if(temp_distance <= 30 && temp_distance >= 0){ brake(); /* * 判断当前舵机应该向左还是向右转 */ if(flag){ if(pos<170){ pos=pos+45; }else{ flag = false; } /* * 如果探测距离大于阈值,则舵机回正,小车转向 */ if(distance > 32){ pos = 90; myservo.write(pos); delay(1200); //判断小车回正方向 if(pos >= 90){ turn_L(35,35); }else{ turn_R(35,35); } delay(250); temp_distance = distance; } /* * 如果探测距离小于阈值,则继续扫描 */ else{ myservo.write(pos); delay(1200); } }else{ if(pos>10){ pos=pos-45; }else{ flag=true; } /* * 如果探测距离大于阈值,则舵机回正,小车转向 */ if(distance > 32){ pos = 90; myservo.write(pos); delay(1200); //判断小车回正方向 if(pos >= 90){ turn_L(35,35); }else{ turn_R(35,35); } delay(250); temp_distance = distance; } /* * 如果探测距离小于阈值,则继续扫描 */ else{ myservo.write(pos); delay(1200); } } } /* * 如果前方没有障碍物,直行 */ else if(distance > 32 && distance < 1200){ advance(35,35); } /* * 如果雷达挂了,小车停止 */ else if(distance == -3){ brake(); } } 如您认可上述经验,欢迎您的联系: 官方微信公众号:benewake-bj 或搜索淘宝:北醒光子科技有限公司https://shop155404578.taobao.com/ |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶







