|
9963| 3
|
颠覆腿足机器人的刻板印象,加州大学RoMeLa实验室将腿足... |
 腿足机器人一定要做仿生的吗?显然答案是不尽然的!大自然赐予很多生物移动的功能,让我们能仿照这些生物制作出功能强大的仿生机器人。而在仿生之上,结合巧妙的机械结构制造出的“超仿生机器人”显然更有魅力。比如加州大学洛杉矶分校的RoMeLa实验室,他们就在致力于利用各种鬼点子做不一样的腿足机器人。 不一样的四足机器人ALPHRED2 近日,加州大学洛杉矶分校的RoMeLa实验室更新了一段视频,视频展示了他们研制的一款机器人(ALPHRED2)的最新成果。这是一款普遍意义上的四足机器人,但是和我们之前所见过的四足又有很大不同:  相比于叫他四足机器人,该团队的成员更愿意称之为多模态运动机器人。因为ALPHRED2可以利用自身的结构优势,完成不同运动模式之间的转换。它除了能够达到最快2米每秒的速度向前奔跑外,能蹦着往前走也是它的特点之一:  其他四足机器人想要拥有抓取能力还需要在头顶装一个机械臂,而ALPHRED2却能在四足和双足之间转换,多余的两条腿瞬间变成大长臂。这样,它就可以在不借用外力的情况下将包裹从一个地方移送到另一个地方。(这个优势似乎特别适合四足机器人的快递配送,平衡了四足和双足的优点…) 当包裹在地上时,它可以整个身体趴在地上保持平衡,并利用“大长腿”夹取将包裹放到自己背上。  移动到桌面时,又能够两条腿稳定住身体的同时抬高自己的重心,将包裹稳稳的放在桌面。  这里,ALPHRED2之所以能够利用双腿站立,是因为它每只脚下面都有一个小爪子‘副手’,当需要他们时,小爪子就会张开稳稳的抓住地面。  此外,ALPHRED2还拥有一般四足机器人没有的弹跳力,它可以利用四条腿平地跳起来超过1米,并稳稳的降落在土地上。  当然,ALPHRED2能跳这么高,和它强大的腿部爆发力脱不了关系,它每条腿的瞬间爆发力可以像跆拳道选手一样击碎一块很厚的木板。  不过,小编最喜欢的还是这款机器人走路时六亲不认的步伐,这妖娆的步态不是任何一款四足机器人能比拟的啊!  下面还是一起来欣赏一下这款机器人的完整视频吧: 另辟蹊径的双足机器人 虽然大家对RoMeLa实验室的四足机器人并不是很了解,但是谈及他们的双足机器人,相信很多人都略有印象。 双足机器人一直是机器人界研发的难点,因为我们很难保持它们的平衡。想要解决这个问题RoMeLa实验室的科研人员们便研制出了一款会轻功的机器人BALLU,它就完美的解决了双足机器人随时会摔倒的困境。  BALLU,全称 Buoyancy AssistedLightweight Legged Unit,意思是“浮力作用下的细腿装置”。它的身体是一个氦气球,还有着一双超级细的铰接腿。由于它的重量几乎可以忽略不计,BALLU永远不会摔倒,并且还能灵活地走走跳跳,执行各种双足运动,只要你不在外面刮大风的时候把它放出来。  严格地说,BALLU 更像是一个混合动力飞艇。它比空气要重一点,所以靠自己是无法浮起来的。这时候就需要BALLU的腿来控制自身的运动。由于它的腿非常细,一点儿也不笨重,所以每条腿活动的自由度很高。BALLU甚至能在水面上行走,这或许就是中国武侠小说里的轻功“水上漂”了!  除去给双足机器人一个超轻的身体,RoMeLa团队还想过让它们变换一种走路方式,比如像螃蟹一样横着走。于是他们创造出了另一款双足机器人NABiRoS。 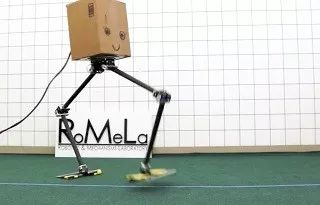 双足机器人为什么一定要模仿人的走路方式?NABiRoS便是“非拟人双足机器人系统”的代表,让它的双腿横着走路可以很快解决目前人形机器人存在的太慢、太不稳定、太贵、太复杂,以及太危险等问题。  另外为了另辟蹊径,让NABiRoS功能更强大,研究人员还打算给NABiRoS 加装一个可旋转的膝盖来帮助他轻易爬上楼梯,或是攀爬海军船上带有高门槛的门廊,大概模式就如同下图这样。  此外,RoMeLa实验室在它的奇葩导师Dennis Hong的带领下,还研制了相当多有趣的腿足机器人,他们正在以非常轻松开心的工作态度来完成枯燥乏味的科研任务。虽然这些机器人目前来说并没有太大用处,但这或许也会给我们一些启示,可能打破既往的刻板印象,才是我们创造新奇迹的源泉。 以一种快乐轻松的方式搞科研,或许真的会乐趣无穷哦,比如研发一款多足机器人,就是为了遛狗的时候方便……  本文转自机器人大讲堂 |
 活跃会员
活跃会员
 牛X认证
牛X认证
 编辑选择奖
编辑选择奖



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶







