|
26569| 26
|
[建造日志] 200g格斗机器人制作与配件选择 |

|
如何制作200g级别格斗机器人以及对电子设备的选择。 大家好我叫关光沐,是一名学飞机机电设备维修的学生。参加过几次极战Fmb15kg,kob13.6kg,的比赛。 最近在群里和朋友圈上看到200g格斗机器人cityturbo比赛,赛事地点:上海陆家嘴。看到一群大朋友和小朋友拿着机器干架,那感觉老爽了,老刺激了。作为一个经常在kob13.6kg,fmb15kg游荡小伙。我也表示想做一台,挑战一下自己。做习惯羽量级(13.6kg或15kg)格斗机器人,突然制作200g让我摸不着头脑。电子设备的选择,以及机身的设计。就这样一个一个坑走过,经过4代改进,各个方面趋于成熟。下面由我来给大家介绍一下制作的过程以及如何选择合适电子设备。 我制作是一台滚筒机器人,,一般是由由链条或皮带传动,平行的安装在机器人前面,通常向弹飞对手的方向旋转,使对手腾空,翻转,砸向地面或直接造成伤害。武器转动惯量较之较少,蓄能时间较短,产生的伤害也少一点。通常转速起来的武器具有一定的陀螺仪效应,可以用于翻身。鼓的攻击面积大,可以不用怎么瞄准就能击中对手。基本在2-4s就已经完成蓄能。但是我设计的这台滚筒武器是没有传动装置,直接把电机塞在滚筒里面,俗称内置武器。还有在翻身的时候基本不用陀螺仪效应,在翻身时,而是通过武器不断的击打地面,直到翻身复位为止。这里想必大家会有疑虑,如果多次击打地面复位不成功不是会导致武器转速变低,甚至停止。武器速度降低是肯定的,但是只要不停给油门,武器就不停,这不像大级别的格斗机器人。毕竟一台机器也就200g。 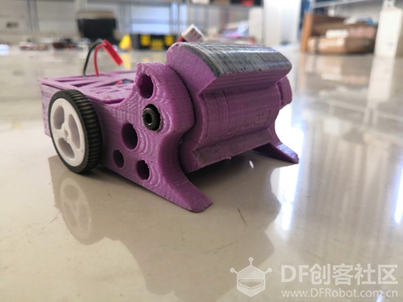 首先我先规划好机器身上的部分各占的比重。武器40g,行驶27g(包括两端行驶电机以及轮子),电池20g,电子设备15g,剩下的就是机身的重量了。 一开始对这些都不怎么了解,只能一步步去测试。 行驶电机的选择,一般我们选择玩具上面的减速电机或者其它迷你机器人的减速箱,以下是我从淘宝找出一些减速箱并做对比。 DC3V-6V直流减速电机  (这个减速箱太过于重了一个减速电机就有70g左右的重量。不适合用在200g的格斗机器人上,主要不符合自己设计的重量比。这个直接淘汰) N20精密减速箱 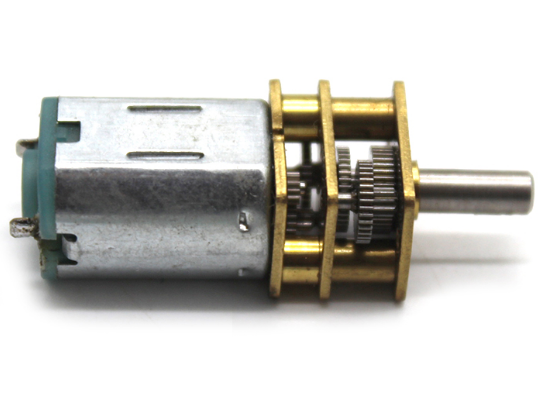 (这款减速箱很符合我们设计的标准,有3v.6v.12v,转速有很多选择,可以根据自己设计去选择。输出的还是金属轴,而且这一个减速电机才只有10g左右,这个重量非常适合我们去设计机器,而且价格便宜) 空心杯减速电机 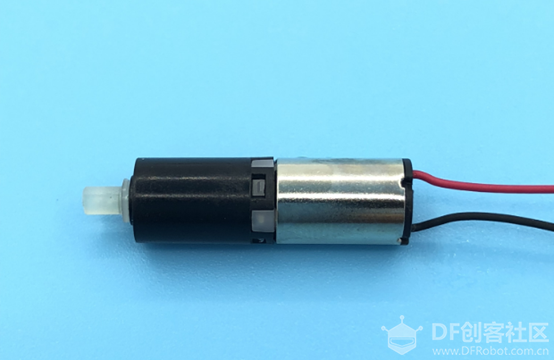 (空心杯减速电机,小巧,重量轻,也就5g左右,速度快,缺点输出轴塑料,减速外壳也是塑料,相对而言耐冲击小,易损坏,价格还微微偏高,轮子方面也不好选择。) 介绍完上面的减速电机各个的优缺点显而易见,我选择性价比高的N20减速电机。 轮子 我在淘宝搜索关于n20减速电机的轮子  直径28.6mm重量3.2g,重量轻,使用方便快捷,缺点:轮子受攻击后,d型孔会扩大,容易导致轮子松动脱落。得后期加一些胶水固定。  直径43mm,重量在8g左右,胎面宽,抓地力强,比较适用铲车啊,举升类的,缺点:直径大,胎面大,容易受攻击的目标。 武器电机 我用的是1504无刷电机2000kv  行驶的电调,以下是我推荐的两款双路电调。 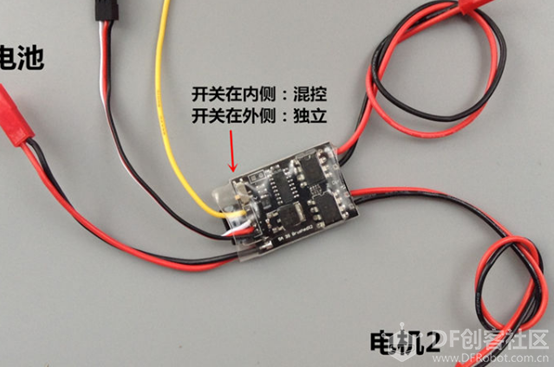 这是一个35:1坦克电调。体积较大(35*22*8.2),这个输入油门超过100%就会重启,得把油门调好。不过它有混控模式,如果不会设置混控,或者没有混控的遥控器。一般情况我们不使用混控功能,有些地方需要微调,让自己机器处于最佳的适合自己操控状态。如果是自带混控,就无法调整机器一些微调参数,这是只能靠自身操控去弥补。  咸鱼2b电调最大支持2s(7.4v)双路,无自带混控,体积小(24*13*4.5),重量轻(1g多)反应快,手感好。以上的优势适合空间布局,以及重量分布。 这两款电调我都使用过装上机器使用,咸鱼2b电调反映更快一些,相对坦克电调而言,一开始使用第一款坦克电调,感觉还可以,用上咸鱼2b电调,明显感觉就不一样。适合竞赛需求。反映啊和操作手感都比上一款的好。个人感觉。  最近咸鱼升级了咸鱼2b电调,体积比之前更小,电压2s-3s,持续电流2a,最大3a,(注意:这不是虚标的!)  武器电调我使用的是好盈的天行者20A。  这电调体积大,重量重,但是我是把外壳都拆了,一些输入输出头我都拆了自己焊跳线去使用。还有一个无刷电调,小蜜蜂无刷电调,那个体积小,性能好。(因为我以前就有好盈这个电调,懒的花钱去买新的。)不过在我使用过程中电调压根发热就很温和,感觉这电调对于这个电机负载表现出沉余量大。 电池选择 我选择的是双天7.4v(2s)250ma,重量15.67g左右。体积小,重量轻,放电率高。在我测试中可以坚持5分钟。(暴力全开状态),对于比赛只有3分钟,足足够用了。  遥控器 我选用的是天地飞7,带6通接收  开始绘画机身,我使用soildworks进行设计,我设计的前面有个小铲子,整体车身为一体打印。 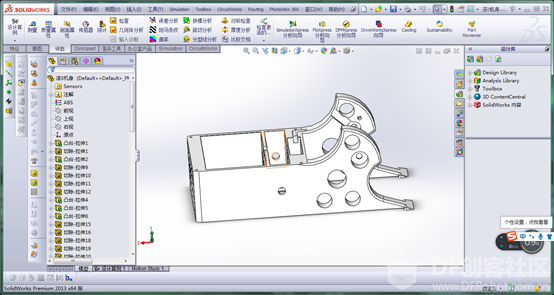 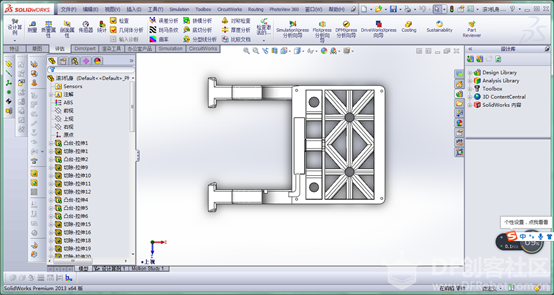 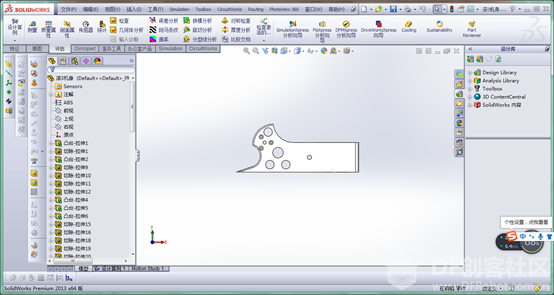 机器后盖 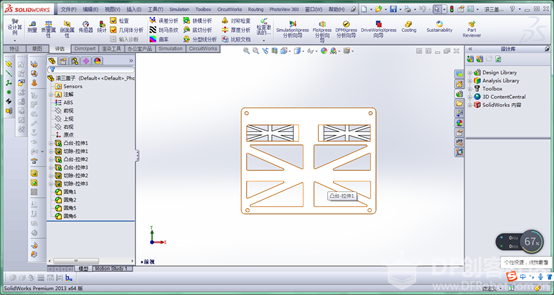 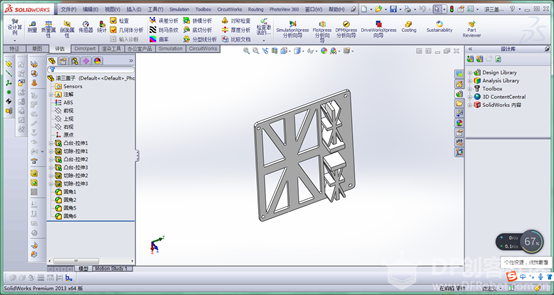 滚筒设计,这里可能有人问,非对称怎么找重心呢。直接利用soildworks中的重心。还有为什么设计非对称武器呢?主要打击效率有关,非对称打击效率比对称的高,而且杀伤力更高。 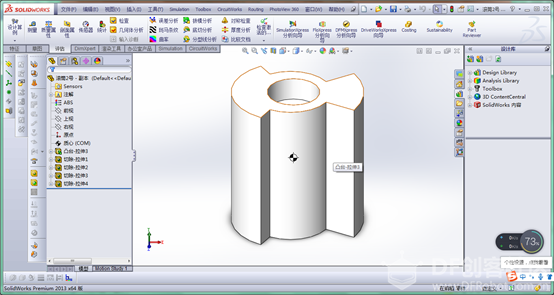 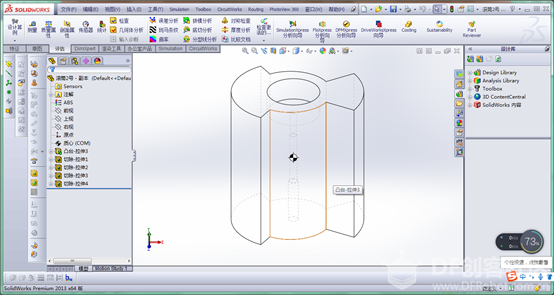 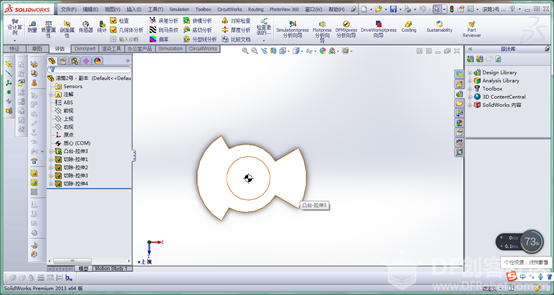 轮子 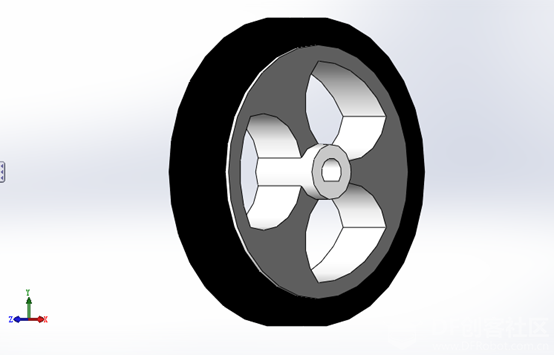 减速电机 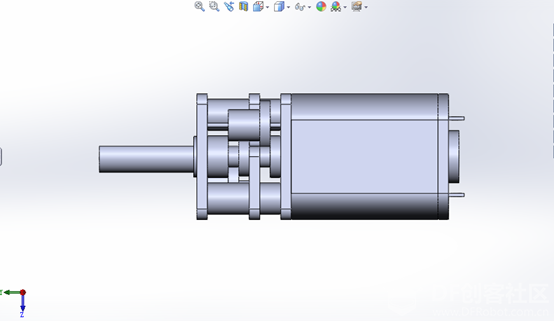 整体配合 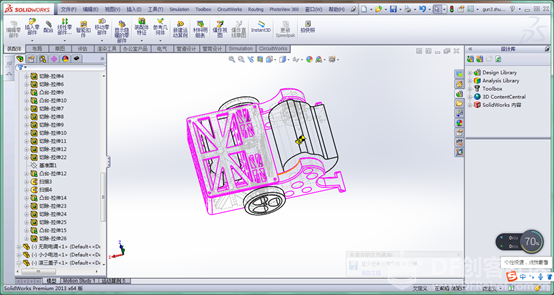 图设计的差不多了,我把它们以stl格式导出,Repetier-Host 3d软件打开。填充我只用了50%,这里我设置打印速度比较慢,为了打印的质量。 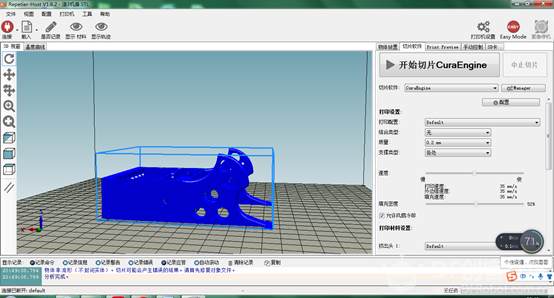 打印好的机身,感觉打印还行。  武器和后盖的打印,因为这要求比较高,所以我100%填充。  打印好的零件   零件打印完,一切准备就绪。首先我还得在滚筒上攻丝,是为了拧上螺丝。第一步将1504无刷电机塞在滚筒预定的设计孔。我发现塞不进去,因为3D打印有误差,我用卡尺量了一下,小了20丝,没办法只能拿打磨机一点一点打磨,打磨差不多,用台虎钳慢慢压进去,达到紧配合。  装两侧轮子,以及N20减速电机和驱动咸鱼2b电调。如果想增加不掉轮子几率,可以在轮子和轴之间点一点万能的502胶。  把武器固定好,把固定武器的轴承压进去,用螺丝把武器电机固定好,后用m3螺丝穿过轴承拧上滚筒。拧完,检查武器顺滑程度,如有卡顿,可能轴承不平,螺丝上错位等。调到一定的顺滑就行,有一点点卡顿是正常的。  各个电子零件安装到位,并逐一检查是否存在短接,反接。检查完通电准备测试。接头是jst,电源通断没开关,只有拔插   以通电的机器等待我的暴力测试视频地址:  武器正常  冲鸭(冲呀)。行驶正常。   下面我的让你看看什么叫狼灭(狠人)。(以下是视屏的截图)  看到那个飞的东西没,这是被他击飞一个壳子。  爆不爆力,愣是啃了一口,我自己看来挺暴力的,可能在大佬们面前显的微不足道。 制作这台机器人大家一定要小心,不要伤到自己,尤其测试武器的时候,做好找个密闭结实的空间进行测试,如果没有这些条件,带个护目镜,离的远一点。测试时人员一律不得靠近,注意熊孩子。 有些地方写的不怎么好望大家指出,这是我第一次写文章,没有大佬们切入点那么准。 注:电子设备有部分来源于淘宝。 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶







