|
10966| 13
|
[项目] 基于blinker的Otto萌宠小机器人 |
|
本帖最后由 康康 于 2019-12-5 14:12 编辑 快放寒假了,您家的小屁孩儿在家干嘛呢?如果是整天抱着手机打游戏的哪种,何不尝试用下面的呆萌跳舞机器人吸引下他的注意力? 做这个小机器人除了工作时间我大概花了5个晚上才做出来吧。除了程序这一部分,在安装调试的时候也花了很多不应该花的时间,接下来,我会在本文中提到要注意的事项!首先我们先来了解下,什么是Otto Robot。 Otto Robot 为开源的交互式机器人,可透过Arduino开发,并且透过3D打印印出机器人的外壳。OttoRobot最初其实是参考Biped Robot中名为Zowi 的开源程序,在外型部分,OttoRobot 更为轻巧,透过3D打印机在两小时内就可以组装完成属于自己的机器人,相当适合初学者或是小孩。
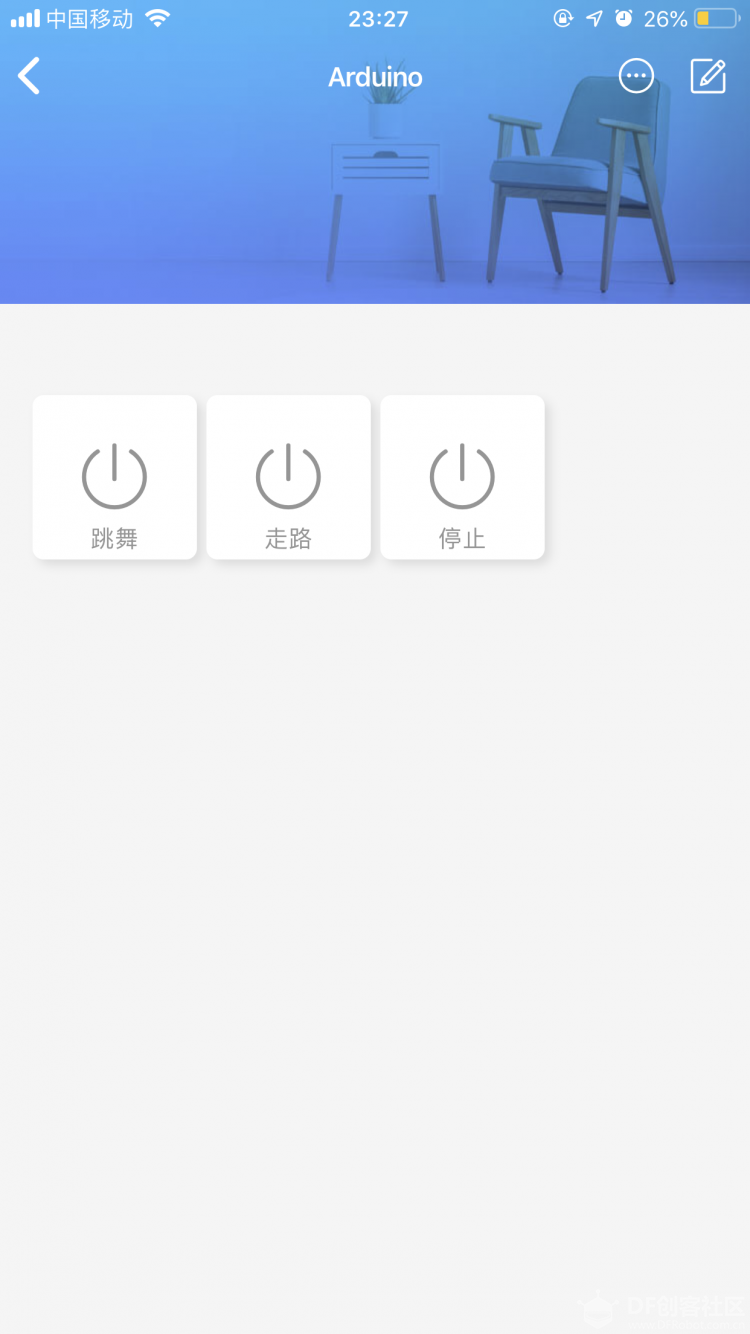
这是我在社区上看到别人写的,很详细,也很值得学习 其实我发现呆萌机器人又很多功能可以加进去,比如WiFi,手臂,音乐,或者人机对话,只有你想不到的,没有你做不到的。接下来先观看下我的这个视频。 #材料篇 1.螺丝刀 2.剥线钳 3.esp8266 4.超声波 5.舵机 6.电池 7.打印材料 8.电络铁 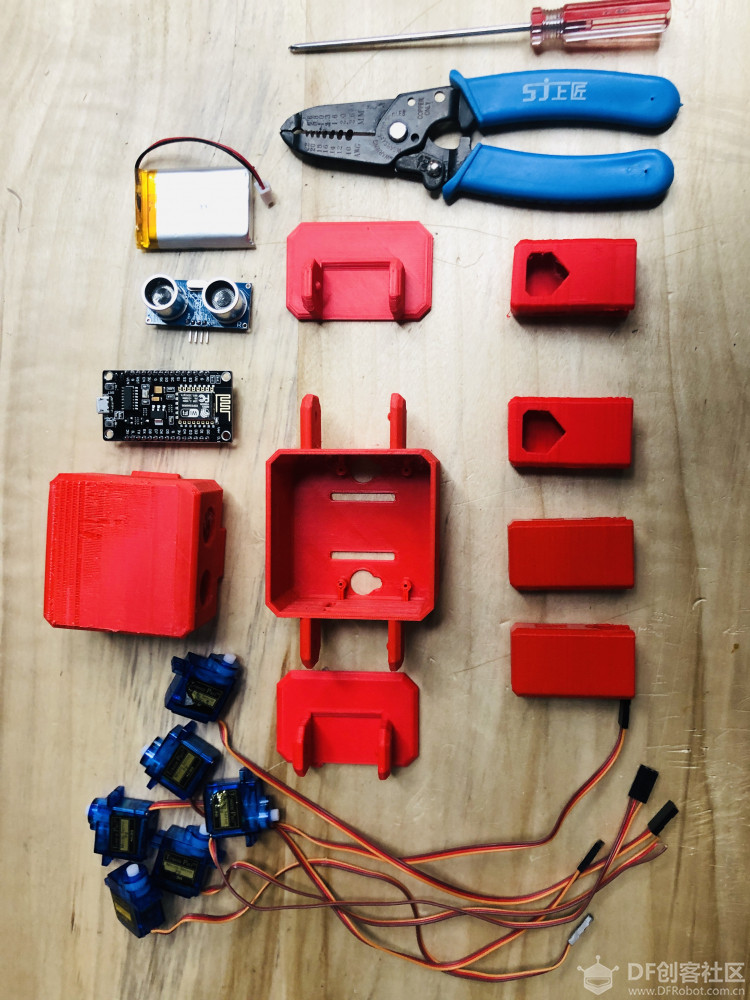 #打印篇 《Autodesk 123D》是由欧特克公司 (推出过知名的 AutoCAD) 发布的一款免费的 3D CAD 工具,你可以使用一些简单的图形来设计、创建、编辑三维模型,或者在一个已有的模型上进行修改。 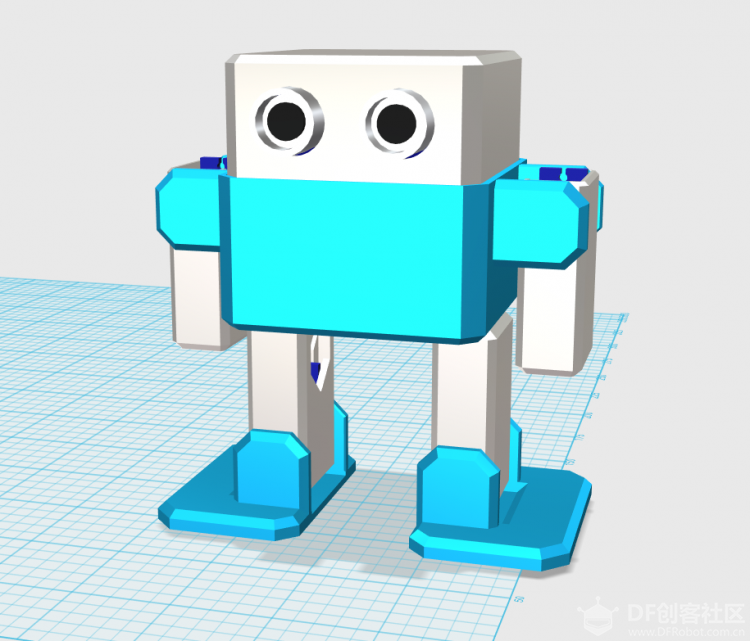 切片软件使用3dstar 打印模式:决定模型的打印速度 支撑参数:模型切片时用来支持的方式 剥离系数:建议2.3-2.6 寄出温度:建议195-205  #组装篇 在制作之前,必须先把所有的舵机调试一遍,我时调试到90° 首先固定机身,不然无法固定机腿 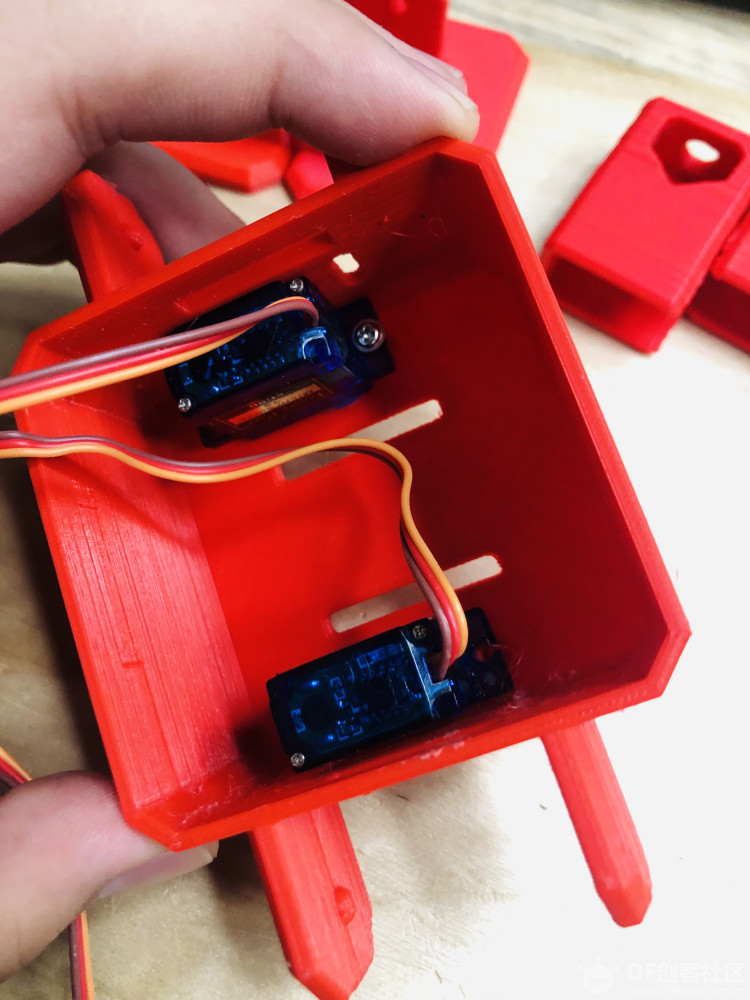 然后固定机腿,注意螺丝要拧紧哦  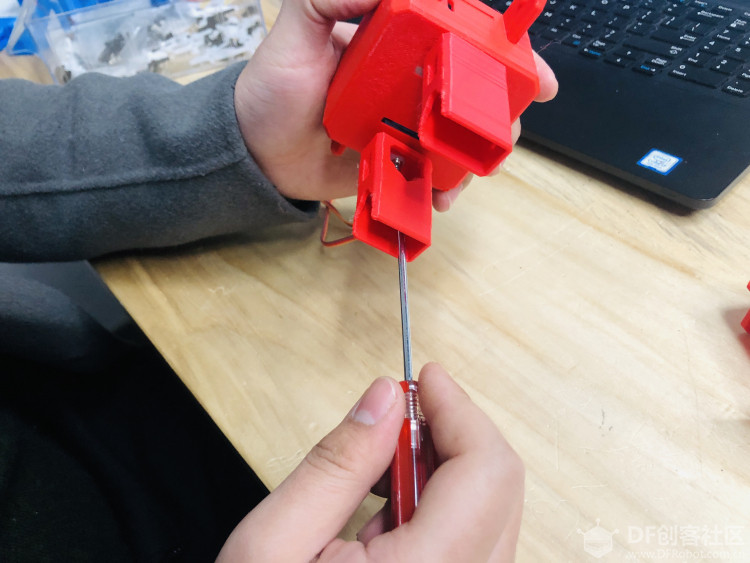 然后固定脚,在固定过程当中要小心哦,千万不可用力过度,我就是用力过度掰断了好几个 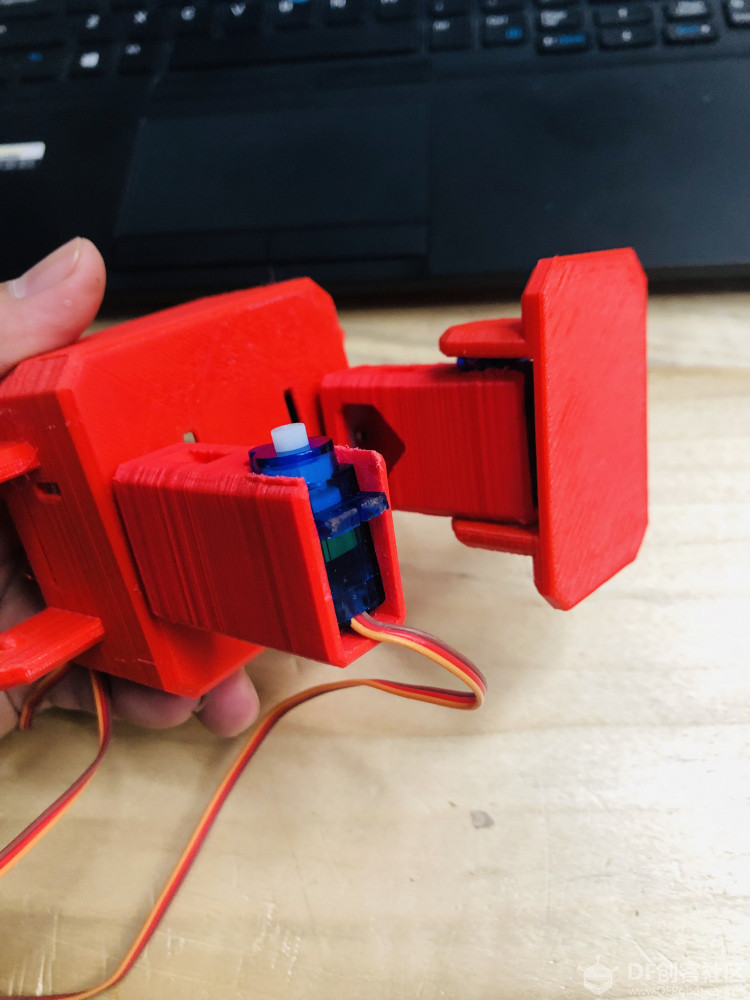 最后固定机手,一个帅气的机器人马上要好了,激不激动 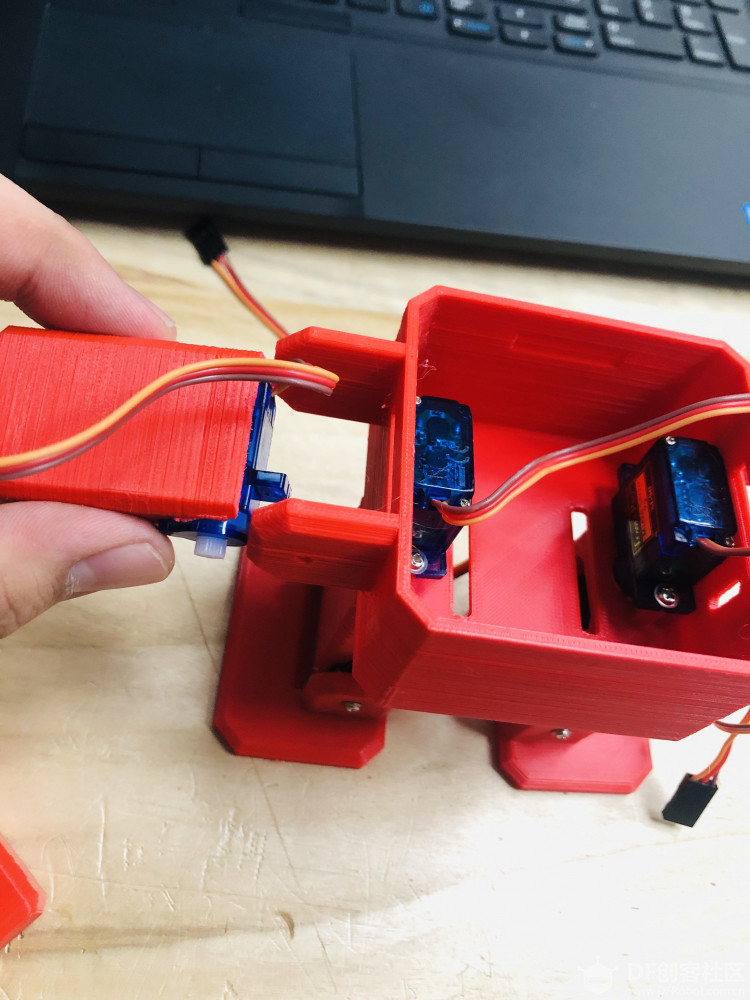 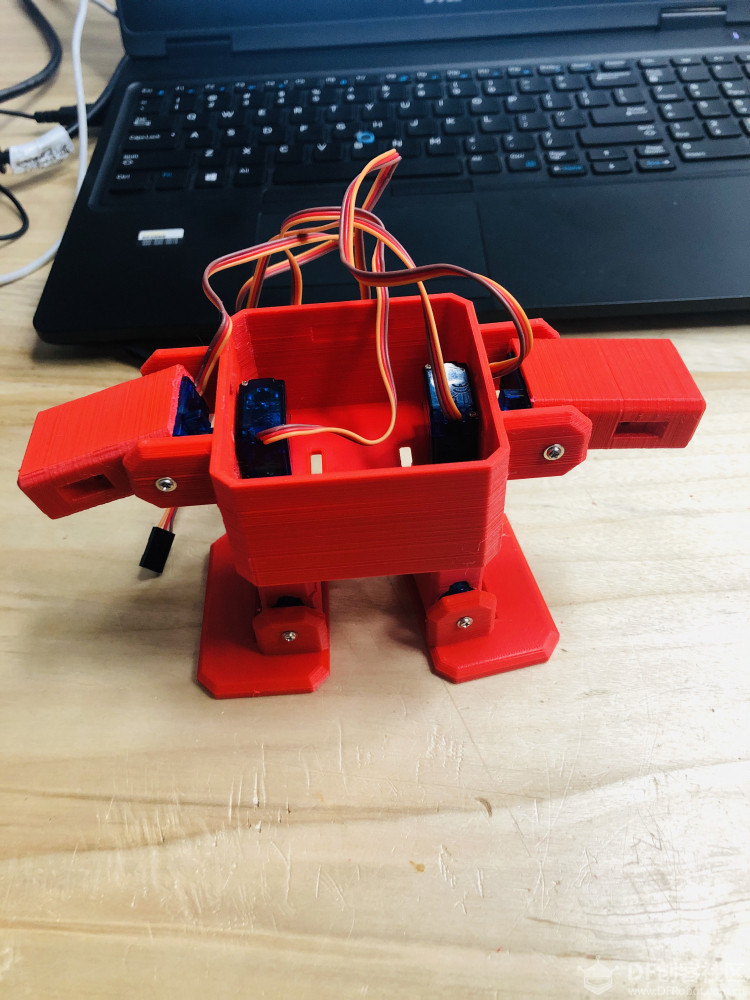 最后把超声波放上去就可。。。。。。。。。注意哦,我到了这里也把舵机测了一遍,发现还真的歪了一点,在调试一下哦。 #电路篇 舵机1---D0 舵机2---D1 舵机3---D2 舵机4---D3 舵机5---D4 舵机6---D5 超声波Trig---D6 超声波Echo---D7 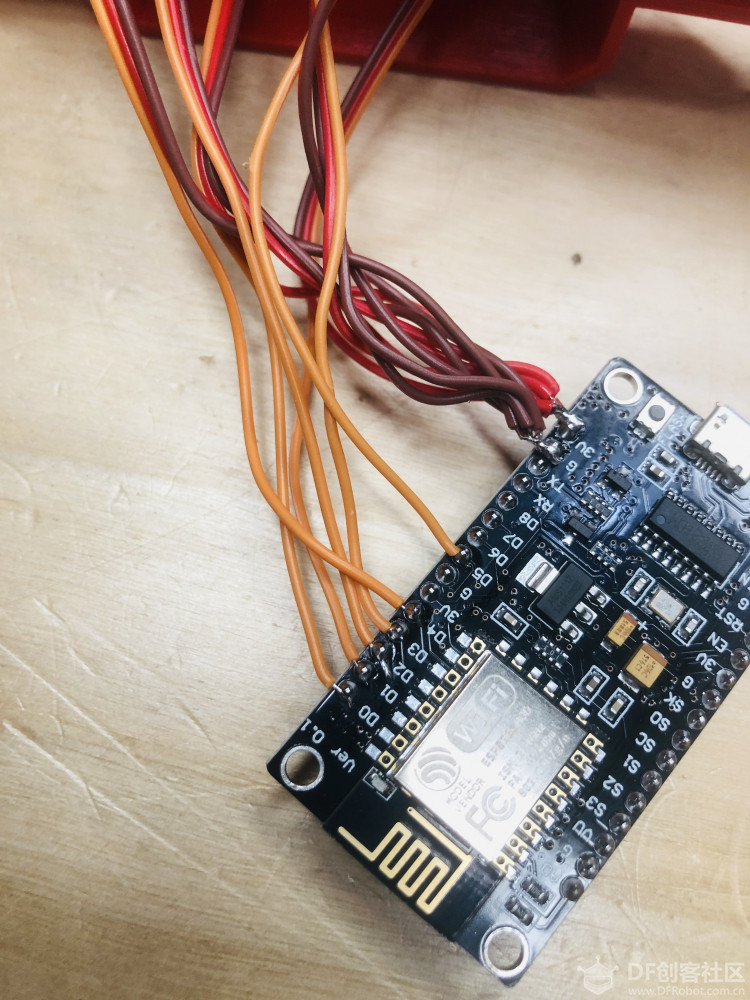 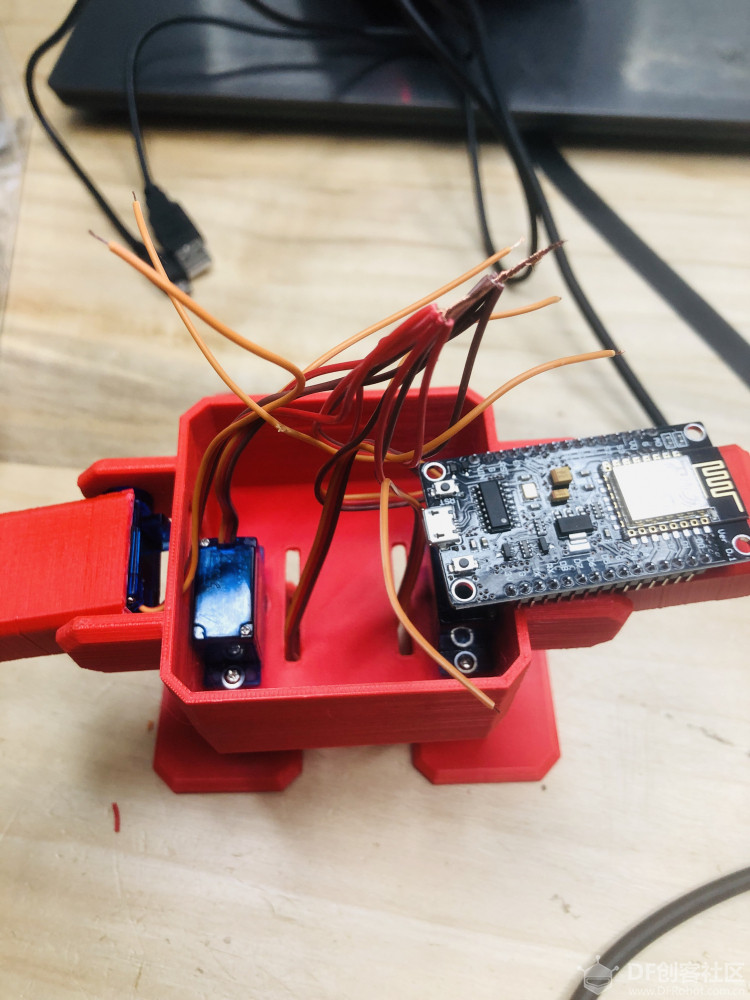 由于本人有点懒,把所有的VCC跟GND接一起了,啦啦啦啦啦~ #软件篇 blinker是什么? blinker是一个物联网接入方案,旨在让大家可以轻松畅快地DIY物联网设备。 其由服务器端、app端、设备端组成,可以部署到几乎所有物联网平台 app端支持ios、android 设备端可以使用蓝牙、WiFi、MQTT等方式接入 通过界面布局器,用户可自己拖拽布局设备控制界面,自由打造你的物联网设备 blinker能做啥? 快速开发物联网 / 智能家居 / 无线遥控项目 手机 / 语音助手 控制设备 蓝牙ble / 局域网WiFi / 远程MQTT 接入设备 Blinker官方网站:diandeng.tech github:https://github.com/blinker-iot 社区支持:https://www.arduino.cn/forum-132-1.html 下载并安装blinker APP 在APP中添加设备,获取Secret KEY
DIY界面
 注意:我在IDE上上传了板子的历程,手机可以控制LED,但是由于库文件的定义错误,无法控制LED点亮,得自己外接一个LED灯 下载我下面的程序,运行下试试吧 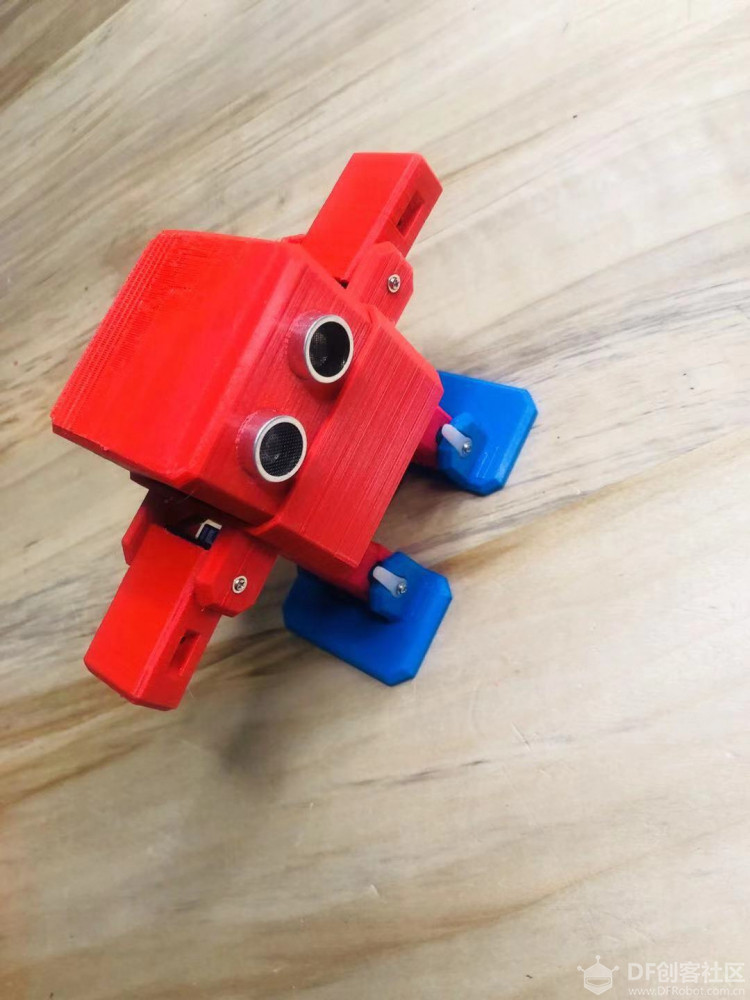 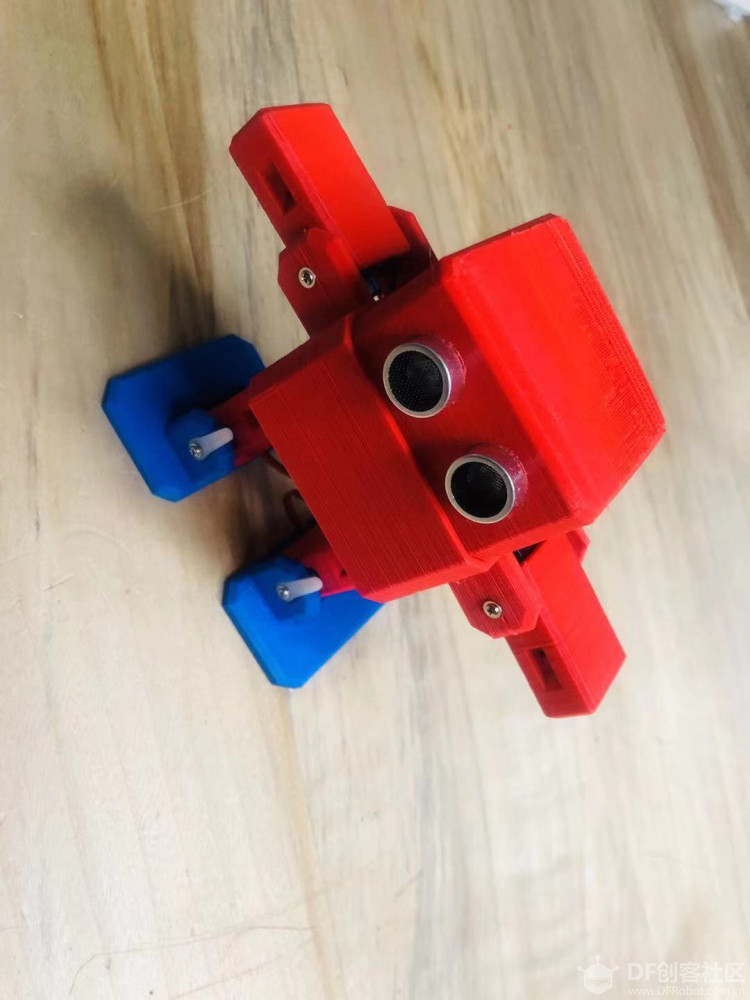 介绍就到这里了,希望能帮助到大家。 科技不应该总是那么高大上,应该被普通人创造性的应用到日常生活中。 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed



 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶






