|
6382| 6
|
[教程] 【2020】红外感应障碍物的LED灯 |
|
红外感应障碍物的LED灯能够根据障碍物的距离远近做出反应——距离近、有危险,LED灯发光报警;距离远、安全,LED灯熄灭(如图1)。 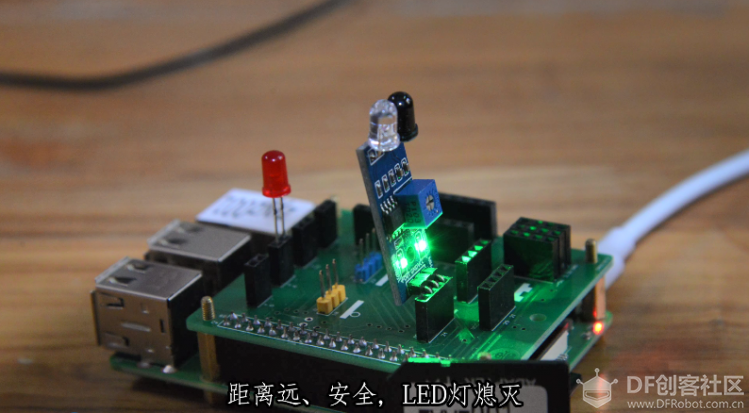 一、实验器材及连接 树莓派(带电源线)一块,古德微扩展板一块,红色LED灯一支,红外线传感器一只(如图2) 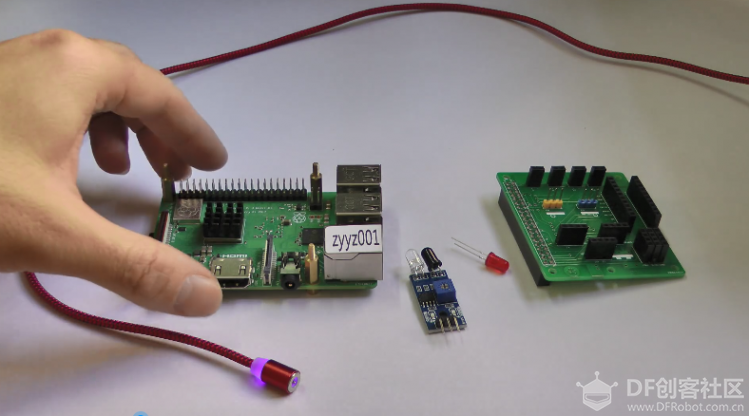 将古德微扩展板按正确方向轻轻插入到树莓派中,注意四周要均匀缓缓用力; 将LED灯插入四个GPIO中的任意一个引脚(比如6号),注意长腿对应为正极、短脚对应为负极; 再将红外线传感器插入24号GPIO,注意三个引脚与引脚的VCC、GND和OUT务必要一一对应; 最后将电源线插入,通电启动树莓派操作系统(如图3)。 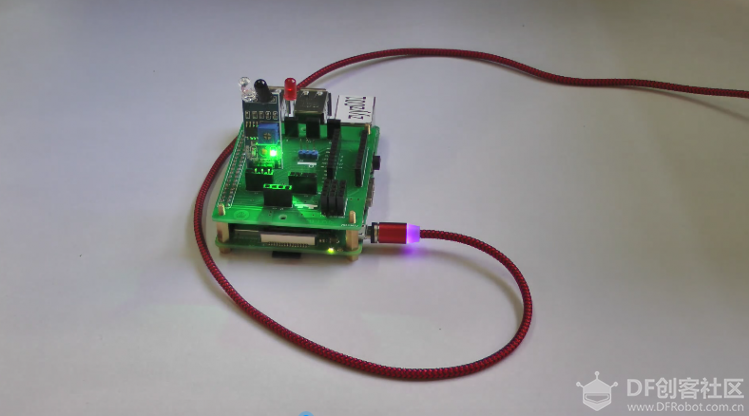 打开浏览器,访问古德微机器人网站编程平台 点击“登录”,输入账号和密码 点击“连接设备”,出现五个连接成功的提示(如图4) 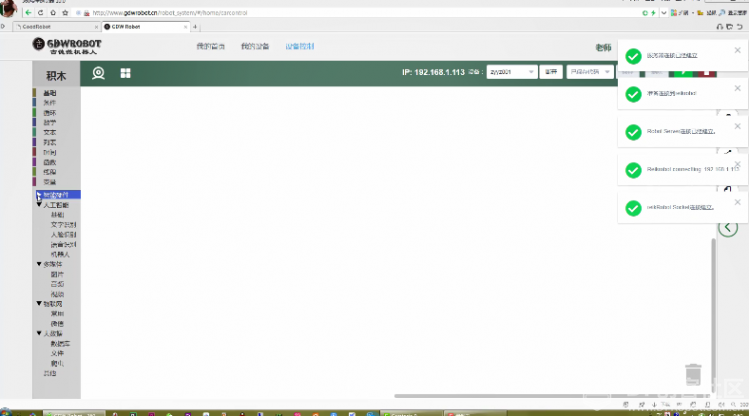 二、开始进行“积木”编程 程序结构是循环中嵌套条件分支判断, 让树莓派“指挥”6号LED灯由24号红外线传感器来控制 程序编写完毕(如图5)  点击“运行”按钮来测试一下: 当红外传感器感应周围范围内没有障碍物时,LED灯保持熄灭状态(如图6); 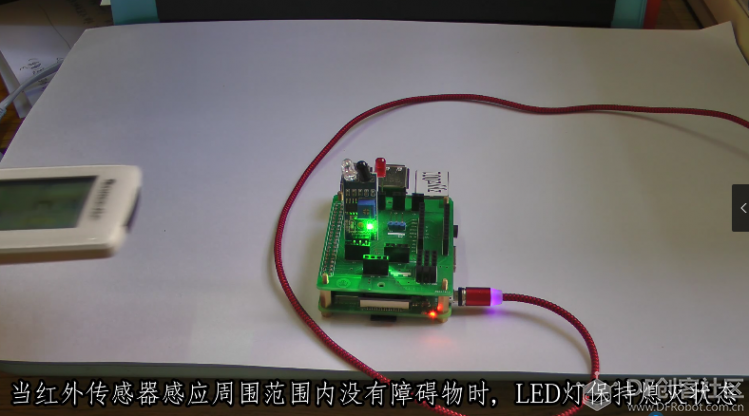 当有障碍物靠近并进入有效检测范围时,红外传感器自己会亮起第二个绿色警示灯,同时树莓派的6号LED灯发光报警(如图7) 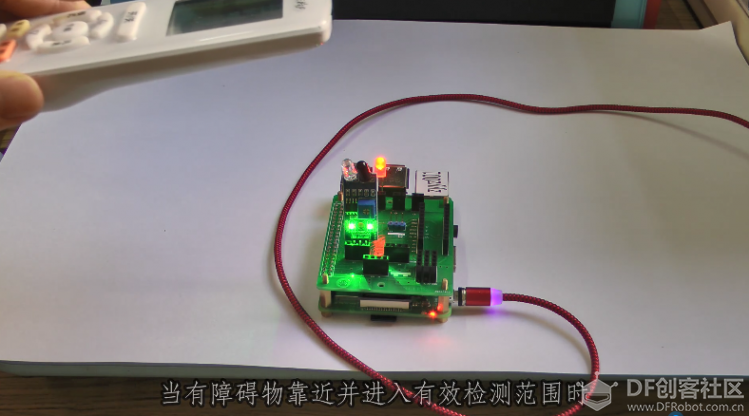 多次测试,均无问题,实验成功 整个实验的视频过程【微课】: |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶








