|
17203| 4
|
【2020】乒乓球发球机制作简介 |
|
本人制作乒乓球发球机的历史,也是我创客历程的的历史。大约在2009年2月份开始,萌生了制作乒乓球发球机的念头,之后制作修改了几百次,本文将着重介绍一个相对稳定的适合客厅使用的桌面型发球机制作方式。 在开始制作发球机之前,基本上对单片机、Arduino这些都是完全不懂,有的只是初中物理的一些基本常识。一开始是不知道如何开始,但经过分析,还是把发球机分成了四大部分,储球部分,送球部分,发射部分,定位部分。后来又增加了控制部分。一开始使用木头、PVC管等制作,也可以完成发球机的基本功能,期间也是也是每个部分独立实验,制作了多种版本,最终才完成了自己的作品。 下面介绍发球机原理并对各部分的成熟结构做个简单介绍 发球机的原理可以看做把球放到一个桶里,桶下面留一个正好一个球通过的洞,通过搅拌,让球从洞里落下,送球部分把球推到发球头,发球头把球发射出去。 1、储球部分 这部分主要是存球,也相对简单,桌面型的主要就是桶增加一个搅拌不至于卡球,带回收的发球机再增加个回收网,或者是储球做成斜面,直接把球送到送球部分。 2、送球部分 送球部分就是把乒乓球送到发球头发射出去。尝试过S线送球、渐开线送球、活塞推球、三爪送球、风力送球、重力送球、螺旋杆送球、垂直轮盘送球,双层盘送球。各种结构都有优劣。 3、发射部分 此部分为发球机性能的一个关键部件,最终出球效果都是这部分决定,尝试过弹射发球,发球轮发球,球拍发球,最终效果最好的还是发球轮方式发球,最常见的发球头上下各配一个电机,安装发球轮,正好夹住乒乓球,两个电机均向外转动,就将乒乓球发射出去。期间也实验过单轮、双轮、三轮、四轮的发球头,其中还是双轮的制作简单,效果相对更好。 4、定位部分 这个部分是让球可以落在球台的任意位置,就是让发球头上下左右的移动,最早的方式是用偏心轮加直线槽的方式,后来改为舵机。 5、控制部分 电路部分来控制发球的球速、旋转、落点等,实际上就只是在控制电机的转速。这部分也是经历了模拟控制到后来的单片机控制,最后用arduino制作了带显示的控制。 其中每一次尝试都是在学习,通过发球机的制作,也学习了很多创客知识,每次遇到困难去解决的过程,我想就是一个创客成长的历程。 在制作发球机的过程中,工具和工艺的问题一直困扰着我,最早用木头、PVC管、铁片等材料能完成的结构相对简单,加工难度也大。后来看上了3D打印,可以迅速的实现自己想要的结构,更重要的是成本非常低。大概花了两年时间攒出了自己第一个3D打印机,再后来,建模设计的学习又花了很久,最终的作品,我希望是尽量用3D打印实现,这样任何人都可以很容易的复制。 下面我介绍一下用3D打印的方式制作一个桌面乒乓球发球机推荐的制作方法 1、储球部分,这部分可以买个成品水桶加工或者是3D打印一个 2、送球部分,桌面发球机推荐三种送球方式,重力方式,螺旋方式,双层盘方式。其中重力方式最简单,但无法做到从下往上送球,另外两种方式均可以。3D打印建议使用螺旋杆方式,制作简单,结构简单,不卡球。 重力方式的原理:下面一层带洞的圆盘是储球桶的底,上面一层带缺口的圆盘转动,会有一个球落在下面一层圆盘被带着转动,当圆盘转到下面的洞口时,因为有旁边的挡片挡住,靠重力就掉下去,这时候可以用一个斜坡让球滚到发球头 双层盘原理:两层固定到一起,同步转动,第一层盘用来定位球,第二层是S形拨杆,转到洞口时,s形拨杆会把球推出到洞口,后面的球不断的往前推,最终把球送到发球头 螺旋杆原理:通过螺旋杆的转动把球送到洞口 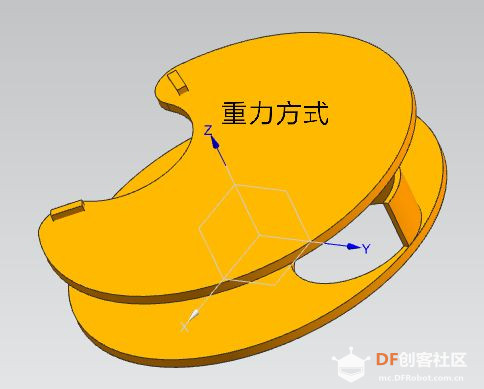 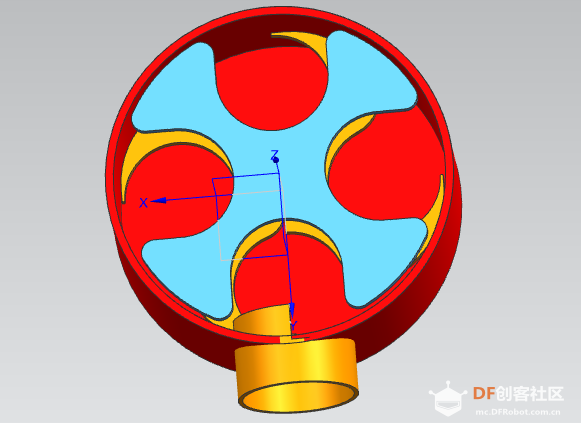 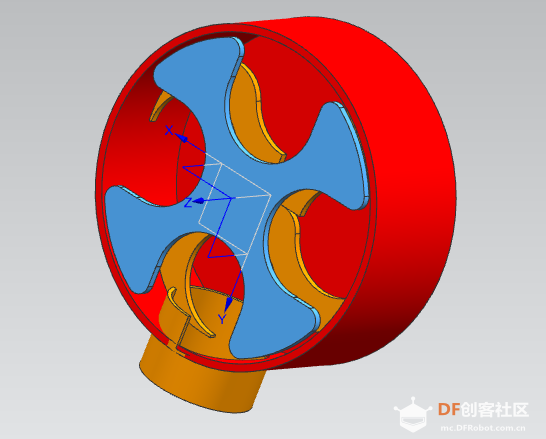  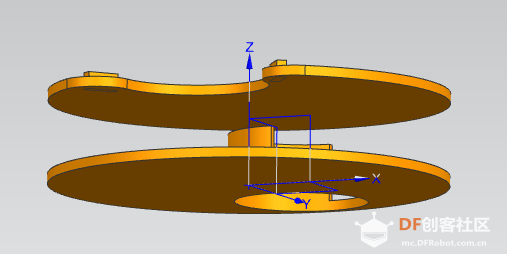 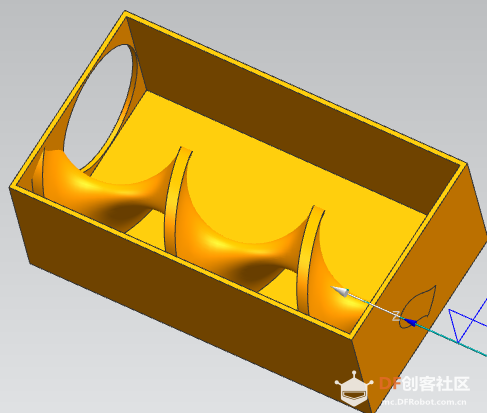 3、发射部分 重力方式设计时,只需要在球的滚动路径上设计上下两个发球轮。 另外两种方式,设计一个发球头来发射,发球头上下安装两个发球轮,通过调整发球轮的转速来实现不同的旋转。图中发球头两边的耳朵处安装发球电机,两个电机转动方向都为向外转动。 发球轮的制作相对麻烦,使用3D打印的方式很难达到均匀的圆,在高速转动时震动太大。这里推荐两种方式,第一种采用CPU风扇,最好是带PWM控制的风扇,这种方式制作容易,控制简单,成本低。把扇叶切掉,边缘打磨平,套上一个硅胶摩擦轮,硅胶摩擦轮可以网上买到,尽量选择硬度较高的,不然高速转动时容易甩出去。也可以自制用硅胶管切,还可以自己兑硅胶固化,硬度最好是60度以上。 第二种方式就是使用航模电机,航模电机也是外转子电机,把硅胶轮套在外转子上面,发球非常暴力。只是需要再加两个电调,成本相对高一点。 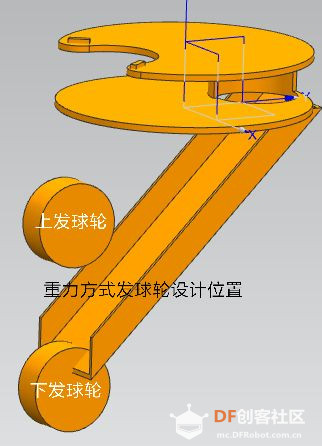 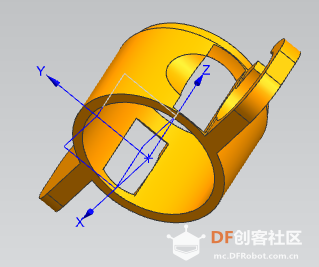 4、定位部分(建议设计时此部分可以省略) 我最早的设计是采用偏心轮摆动的方式,模拟控制,制作简单,但控制精度不够。建议采用下图的方式,采用两个舵机,两个方向转动,实现各个位置的定位。 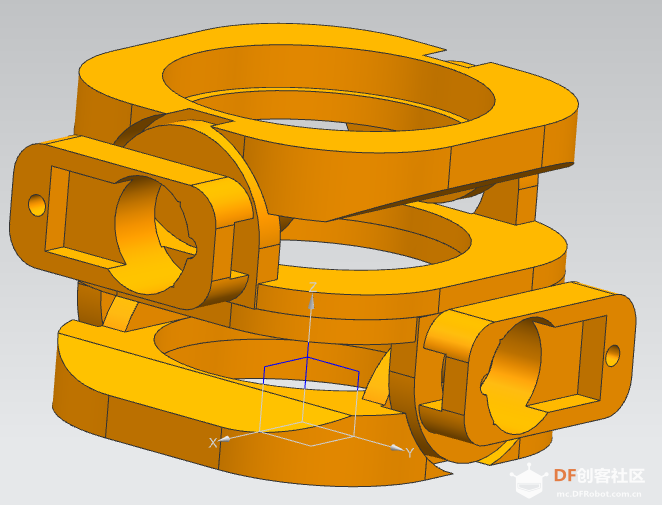 5、各个部件装配 储球桶和送球部分直接连接在一起,螺旋送球方式的储球桶尽量设计成方形,其他两种方式底层的圆盘就是桶的底面。除重力方式以外,另外两种方式在球送出后设计一个内径41mm的管子连接出球口和发球头,管子可以带弯头或者是设计成弧形,但弯头最好不要超过4个,否则容易卡球。如果想实现任意位置球的控制,在发球头和管子中间位置增加定位部分。这样发球机的机械部分就完成了。 6、控制部分 发球机的控制就是控制两个发球轮的转速,送球的快慢,这里可以用Arduino或者是掌控板的PwM控制电机转速,如果是用的航模电机,在Arduino或掌控板的程序里用舵机模块就可以控制,舵机0度表示电机不转,舵机180度表示电机最高速度。送球电机的快慢决定发球的频率,上发球轮转速高,下发球轮转速低发上旋球,上发球轮转速低,下发球轮转速高发下旋球,转动发球头可以实现侧旋,侧上,侧下等各种旋转。定位部分两个舵机控制,通过编程可以实现组合球。这里的程序都比较简单,只用到了Pwm控制可以舵机转动的模块,可以预制几种发球套路程序,来实现组合球训练。完成作品完全可以用在现实训练中。 这个作品尽量采用了3D打印的方式来制作,只要有3D打印机就可以很容易的复制,程序控制部分也只使用了最基本的模拟输出和舵机控制模块,没有基础的人也很容易完成编程。 附件中是一整套发球机的打印文件,需要购买一个TT电机和电子控制元件 |

6.12 MB, 下载次数: 5227
8 MB, 下载次数: 6441
8 MB, 下载次数: 6570



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶







