|
7287| 3
|
[项目] 蘑菇云号 |
|
水面舰艇及水下滑翔机系统 项目介绍环境问题一直都是大家关心的主要问题。如何让我们更好的了解我们周围的环境?如何减少环境污染的影响?我们作为创客怎么样能用我们的一份努力来解决这个大家都关心的问题。为响应这样的一个问题,并且参考了我们前辈的工作,我们立志建造一艘水上水质监测船。 气候变化威胁,海洋上升,海洋酸化,水体中塑料污染的泛滥以及其他有害环境问题的迫在眉睫,现在对我们来说,了解我们的健康比以往任何时候都更加重要。 蘑菇云号以兴趣为导向,希望通过会员的共同努力,建立一个开源的水上平台以及水下探测装置,帮助更多的人能够用这样一个平台开展更多水体研究。近期目标是达成在可控水域的自主航行和探测,远期目标希望能在大陆架范围自主巡航,最终希望能环球航行。  根据第一次成员投票决定,将本水面舰艇命名为蘑菇云号。 蘑菇云号 项目内容1 、立项依据: 根据当前我国环境问题情况以及水上项目的发展,我们设计了本项目用作水质监测以及水上其他项目的载体。 2 、项目意义: 传统的水质监测主要分布在水域中的各个固定监测点完成。但是这种固定监测点组成的水质监测系统,这个观察点都比较固定且体积庞大,因此每个监测点监测的范围有限。我们如果将固定监测点变为移动的,线路可操控,这样我们可以大大减少监测点布置。 3、项目内容以及目标: 制作一艘水面舰艇以及一艘水下滑翔机,整个系统,可以用作水质监测,水上巡航等一系列应用。近期目标,实现自主巡航数据回报;中远期目标,实现大陆架内定点巡航及数据回报;远期目标,实现环球航行及数据回报。 4、项目可行性分析: 本项目参考hackaday上Albatross项目,该项目由DFRobot提供部分赞助,经过联系相关作者,已确认该项目完全开源,并欢迎在此基础上进行任意的设计和改动,经过前期的讨论和分析,制作难点以及需求设备我们蘑菇云都能解决,因此此项目的中远期目标是可预期的,远期目标值得挑战。 项目需求 一期水面舰艇 航程:2.5KM (目标,绕汇智湖一圈到两圈)(6.12公里/小时×2小时=12.24公里) 航速:3.3节(1.7米/秒=6.12公里/小时) 抗风等级:1级(0.3-1.5米/秒) 功能:遥控驾驶,搭载平台(自主按航迹运行) 载荷:船体载荷50KG;(长1.60M,直径25CM,双体,体积157L,排水量MAX157KG) 尺寸:1.1M*1.6M 充气方案:移动气泵 动力:T80—60螺旋桨;两只,单只功率350W,附加螺旋桨挡护板 电调:6S(lipo电池)70A的负载驱动能力电调两只 预期进行时间:2h 电池容量:6S70Ah(24V标称电压)电流14a(max) 电池重量:12KG 自驾系统:Pixhawk4 控制部分重量:2KG 密封选材:乐扣密封箱+硅胶+密封橡胶垫圈 充电方案:室内充电器充电 船体平台设计:框架结构 平台选材:铝型材/不锈钢方管 拖曳平台:电机+线槽 导线:14AWG硅胶线(过流能力,60A持续,80A短时) 接头:防水公母对接插头2.5平方,20A   二期水下滑翔机 下潜深度:5m 功能:水下信息采集 浮力模块设计:步进电机推动, 控制电路:Arduino 尺寸:400MM*600MM, 选材:100*600亚克力管主体,侧翼:长度200MM,宽度100MM厚度5MM铝合金板 传感器:含氧量,浊度,PH值 供电方案:平台供电 or 水下主体自备电源 重量:19KG 拖绳选材: 水下滑翔机设计思路: 考虑到水下滑翔机是本项目的一个特殊的部分,因为在水下,需要考虑到很多个点, 1、水下姿态调节:目前的思路是通过控制重心来调整姿态,主要是通过加速度计或者水平仪等传感器来判断,然后控制电机抽水来促使滑翔机改变姿态(这里只能改变滑翔机向上还是向下两个姿态) 2、传感器位置:传感器装在滑翔机尾端,注射器装在头部,这样抽放水可以抬起或下降头部,调整姿态 第一个阶段完全排空水,这个时候,滑翔机自重小于浮力,头部向上,浮在水面上 第二个阶段,针筒注一半水,自重等于重力,滑翔机头部还是向上倾 第三个阶段,继续吸水,这个时候自重大于浮力,头部向下,但是有牵绳拖着所以不会沉下去 3、尺寸:直径110MM,长度600MM,体积大约3.14*0.55*0.55*6=5.7L,按水的密度1kg/L来算,大约排水量为6KG,(具体尺寸可以先行画图再计算,100MM只是参考) 4、重心控制:先将滑翔机注射器注一半水,调节滑翔机侧翼抱箍,拖绳装在抱箍上,使滑翔机自身能保持平衡, 5、防止翻倾:为防止水下滑翔机翻倾,可在拖绳与抱箍链接处安装一个浮球,以此提供防翻倾的力 6、水上拖曳平台:水上船体安装索盘,即时水下滑翔机失联或被困住,也能将其拖上来 7、供电:水下预留电池供电 8、水下摄像:如需安装水下摄像功能,还需安装补光灯
知网论文(仅供参考)点击查看 三期联调 船载无人机,可系留(等牛兄详细讨论后补充) 航程: 功能: 项目总述 项目由蘑菇云组织管理并在蘑菇场地完成。 预计半年26周完成。从2019年12月12日开始 由于目前尚未有针对的相关标准,所以此项目将采用以下各种中的一部分进行实施 开源项目PX4 pro多载具平台航驾控制平台、航海模型、船舶建造、智能化标准、信息产业部的一些相关标准。 两大部分,分步骤并行实施。 课程 为让整个项目可持续进行,将会对项目中产生的成果通过课程的形式传递出去。 课程大体分为蘑菇云工作坊、实践课程、科技探索项目 蘑菇云工作坊 实践课程 科技探索项目 科技探索项目主要针对学校特殊要求 项目特点 一:水上主体部分 船体选型:双体充气艇(香蕉船)1.6M*1.2M; 船体甲板:平台或者框架结构 船体驾驶舱:舰桥 控制选型:PX4 预期航程:2.5KM 推进器选型:ROV推进器,深度可达300M 定位系统:GPS远程导航 水深传感器:MS5837-30bar压力传感器 供电系统: 控制系统:自驾仪(pixhawk) 执行机构:舵机等 视频系统:摄像头、云台、图传 通信系统:数字图控一体设备、遥控接收机 伙伴计算机:(智能控制设备)树莓派等 系留放装置: 方案说明: 选型:考虑到需求中对艇部分的要求,选型如下 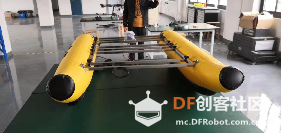  艇体总成基本尺寸: 浮筒:长1.60M,直径25CM,3气室 平台:尺寸68*48CM,不锈钢材质,快速拆装网状结构。 重量:大约13KG 艇体选用说明: 自重13KG,重量适中,载荷约50KG重量。满载状况下,2-4个人就可以完成水中投放。 此艇浮体为充气方式,充放气速度均可以在5分钟左右完成。两个同样的艇体,放弃后,可卷起来装箱,储运方便。 自重13KG,重量适中,载荷约50KG重量。 中间平台680mm*480mm,有足够的面积。不锈钢方管20*20mm,强度耐腐蚀均,满足要求。网状可快速拆装结构,拆卸后,可包装成条状体积,储运方便。 中间平台网状结构,上下均可安装设备。中间横杆两端与外框上,有预留安装位置,方便配合设备安装及其重心调整。 浮体为主浮体加下附加浮体,下浮体在吃水线以下,推进器安装于下浮体之后主浮体之下。 推进选型:   推进器选用全封闭型全浸导管式,推力大约6KG(双发总推力约12KG)。可靠性高耐用性强。  推进器选型说明 推进器为后推式,4根4mm直径的螺栓安装于艇体后下部。 螺栓有一定高度,可一定范围内调整推进器的轴角,以利正常航姿调整。 推进器之前有下浮体的遮挡,一定程度保护推进器运行。 全封闭导管式3桨叶,推进效率较高。 具有较高的防腐性能,可以达到免维护。 350w(单个)功率,配合高效率的电调,加之高效的控制,可有效利用能源,以利航速航程航时等。 电调选型说明: 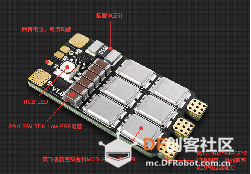 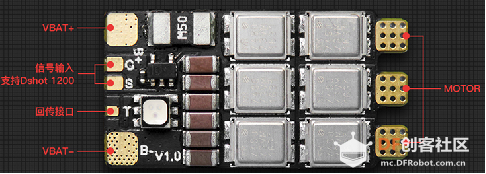 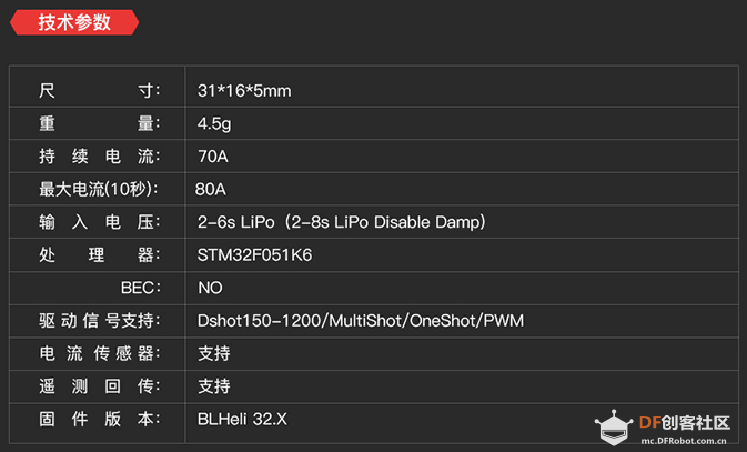 体积小重量轻,方便安装。可自行按需要进行防水处理。 6S(lipo电池)70A的负载驱动能力可双向,安全可靠的支持选用推进器电机的驱动运行。 输入信号可传xu'a统的舵机PWM,也可支持新的Dshot(纯数字信号,刷新率高pwm两个数量级,支持最高Dshot1200) 可选正弦波驱动功能,加强了驱动电机的能力,让电机在各个速度段输出正确的力矩,大大的提高了电机输出转矩,大幅提高了推进器对能源的使用效率。 具有Damped Light的再生制动功能,让电机减速更加灵敏有效。 具有回传功能,可将转速,电压和电流数据回传至飞控。使飞控对电机的控制实现闭环控制成为可能。目前的选用的飞控,支持读取此电调的回传通信协议。 主动续流技术,让电机可回收电量,一定程度上延长续航能力。具有功能强大的上位机设置软件,可对电调驱动电机近完美的配合。 不断升级的固件,功能不断增强。 自驾系统说明: 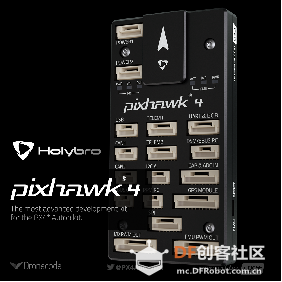 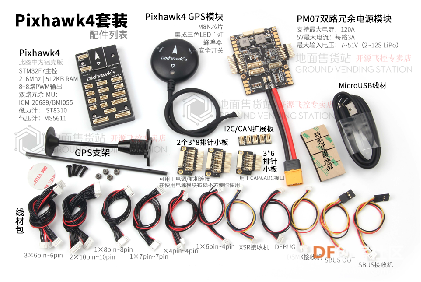 自驾系统选用pixhawk4,新一代的多载具飞控制器。 目前将使用ardupilot固件中的rover固件,此固件有boat的设置,可支持多种类型的船艇的运行控制 运行环境说明: 目前预计的运行环境是蘑菇云附近的汇智湖及位于临港的滴水湖。在此两湖预计的运行水深应不超过5米。以降低测试风险。 图传、数传、遥控设备的通讯距离,预计的运行范围会超过2.5KM。需要靠谱远距通讯设备。 岸边设立地面站设备,天线装置,完成现场操控。预留远端指挥中心设备预研。 由于船体及水下滑翔机等预计的尺寸在1.6米*1.2米,储运需方便。 由于可能运行的水体环境(海水等),两类平台需要有一定的方便可靠的维护性。  二:水下滑翔机主体部分 船体选材:亚克力管,直径100MM,厚度5MM 船体尺寸:直径100MM,长度600MM 预期深度:5M 侧翼选材:厚度5MM铝板,长度200MM,宽度100MM 侧翼尺寸:长度200MM,宽度100MM 传感器选型:压力传感器,含氧量、PH值、浊度传感器 水下主控:航行姿态控制器;arduino控制器,水深传感器 动力系统:浮力调节装置——步进电机、推杆、针管等储气装置 重心调节装置——步进电机、丝杆平台 供电系统: 拖绳材料选择: 主动通讯:卫星通信 系留装置: 抓手系统: 水下视频系统: 三:岸边地面系统 现场遥控站:操控界面——控制手柄 通讯站:模块,天线,接口; 远端控制站: BOM
  人员安排 总工程师:撒哈拉大野牛 项目经理:微笑的rockets 顾问:范磊 穿鞋子的猫贺 项目助理:章鱼 软件:light 硬件:微笑的rockets、章鱼、苏木、火星小哥哥 商务拓展:微笑的rockets 财务:火星小哥哥 采购:章鱼 打酱油:DTTX 法律支持:林媛媛 人员简历人员职责 总工程师:负责整体项目设计,指导建设 项目经理:控制项目进度 项目助理:辅助项目经理收集整理相关资料 软件:px4部分软件调试,非px4部分软件开发(含项目需求) 硬件:硬件采购及制作 商务拓展:找到赞助商并获得赞助 财务:管理收入和支出,登记造册 采购:硬件、服务采购 人员权益 参与讨论项目。 参与投票决策。 提议讨论内容。 名称出现在各处宣传中 资金来源 一部分来源项目组成员筹措 一部分资金来源由项目扩展的收费工作坊支撑(如:PX4工作坊,三维设计工作坊等) 赞助 可供广告面积0.75平方米 其中摄像头前面积两副给重要赞助商 拟赞助商 PX4 DFRobot 上海海事大学无人船实验室  个人赞助 赞助商  电允科技  蘑菇云创客空间 个人赞助(已交费) 撒哈拉大野牛(总工) 章鱼(代表蘑菇云) 微笑的rockets DTTX 火星小哥哥 林媛媛 陈万元 light 朱配清 财务制度 财务公开、透明 收入支出造册,内部公开,不对外公开。 账目管理
费用来源管理
另行开会讨论后决定。 账单转交如发生需要转交账单的情况,应及时和所有组员说明相关账单用户名和密码,以便后续人员的继续操作 账单查账成员有权查账。 处理办法1、以自主开设课程方式营利(采用了本项目的相关设计,课程内容自主开发),销售额20000-50000按2.5%反馈给蘑菇云项目资金,5万-10万按3.25%,10万-20万按4%,20万以上5%; 2、销售本船支或以商业模式(租赁或其他方式)使用整支或部分船支(涉及到所有项目参与者的共同利益),如需要制作更多的船支,项目利益分配需要与成员讨论,不得私自决定; 3、项目迭代的设备,由蘑菇云统一保管,以拍卖或类似方式回收部分资金作为项目资金;如有项目参与者希望购买这些设备,优先有购买权,价格共同商量定价; 开源 开源协议 CC by sharelike(如有保留,请提前告知) 开源地址github: 项目进度
参考链接 Albatross信天翁号: 风力等级: 同类设备: 随着气候变化威胁,海洋上升,海洋酸化,水体中塑料污染的泛滥以及其他有害环境问题的迫在眉睫,现在对我们来说,了解我们的健康比以往任何时候都更加重要水体,以便我们帮助解决他们面临的问题。  我们计划制作一款水上以及水下滑翔系统,可以用作水质监测,水上巡航,船速,风速等不易测量的物理量的测量等。  在2019年的最后一天蘑菇云号首次下水试航成功!项目成员将在蘑菇云开放夜与大家分享试航心得以及项目接下来发展方向。  | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶

 活跃会员
活跃会员
 老版主限定
老版主限定
 小蘑菇
小蘑菇
 蘑菇人
蘑菇人
 蘑菇老人
蘑菇老人
 编辑选择奖
编辑选择奖






