|
5257| 2
|
[教程] M.A.R.K|开箱与组装 |
产品简介最近我刚收到一款来自柴火创客教育出品的 M.A.R.K 小车,这是一款面向 K12 人工智能教育的机器人。下面我们一起来开箱组装吧! 开箱
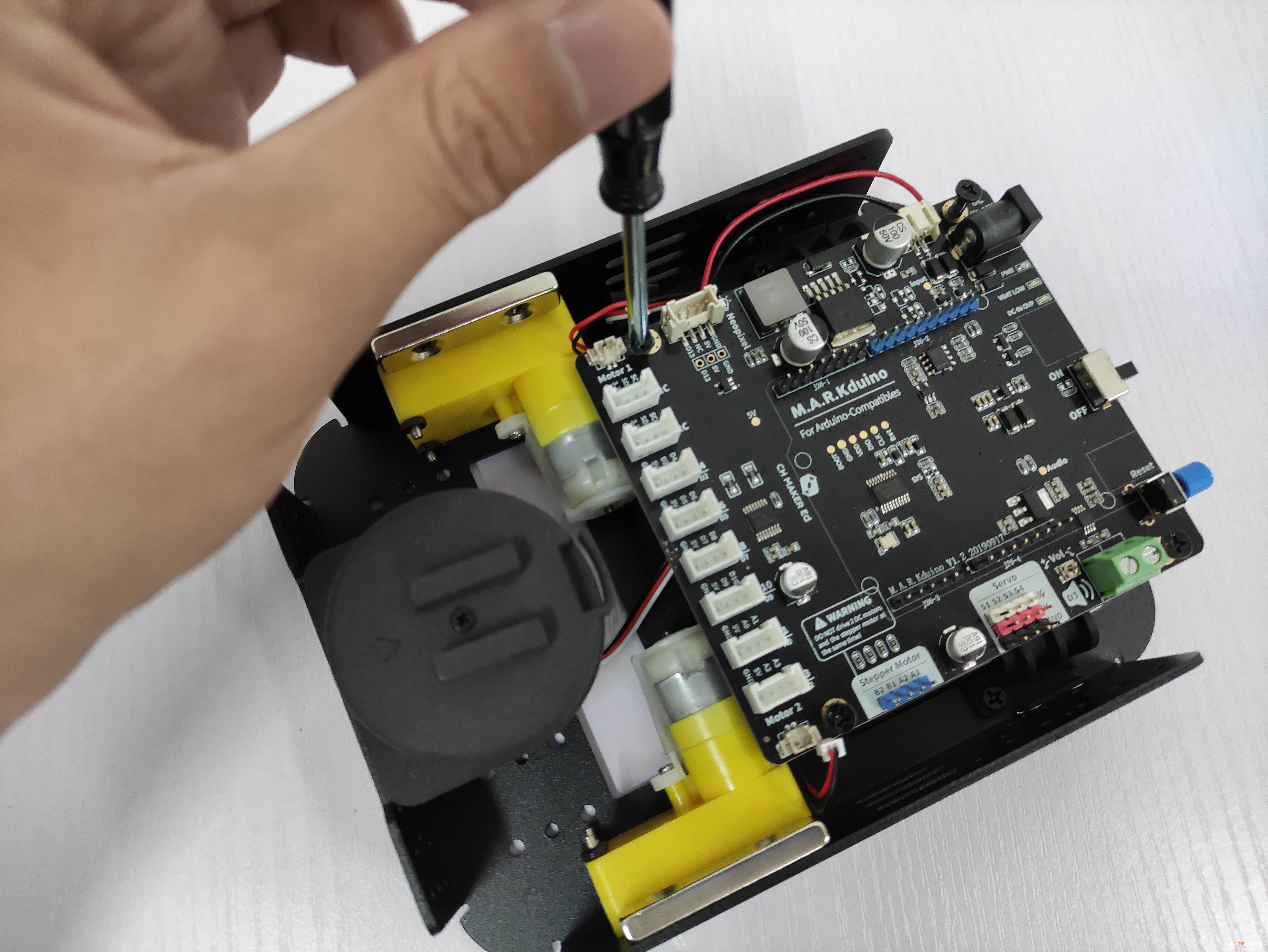
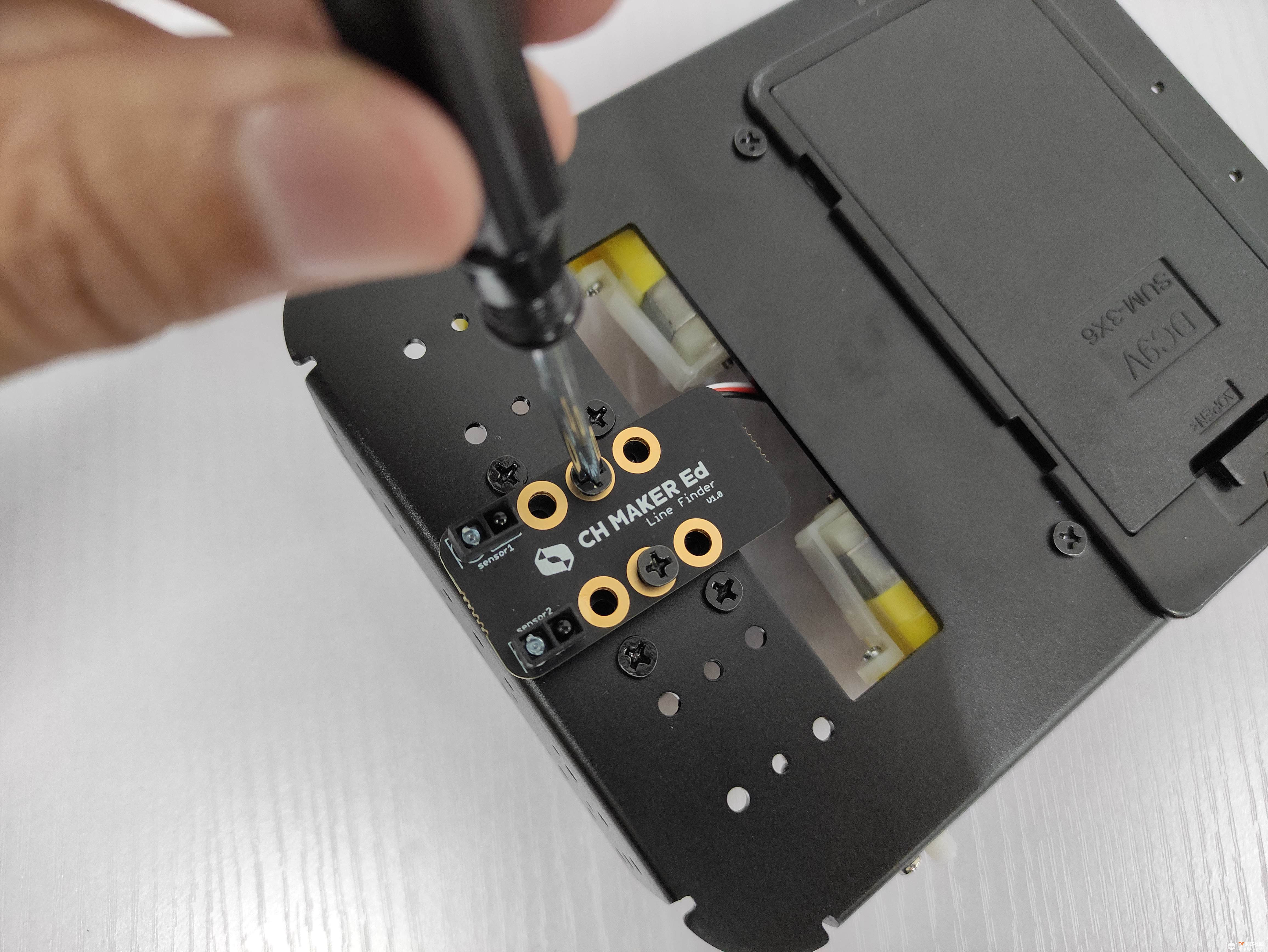
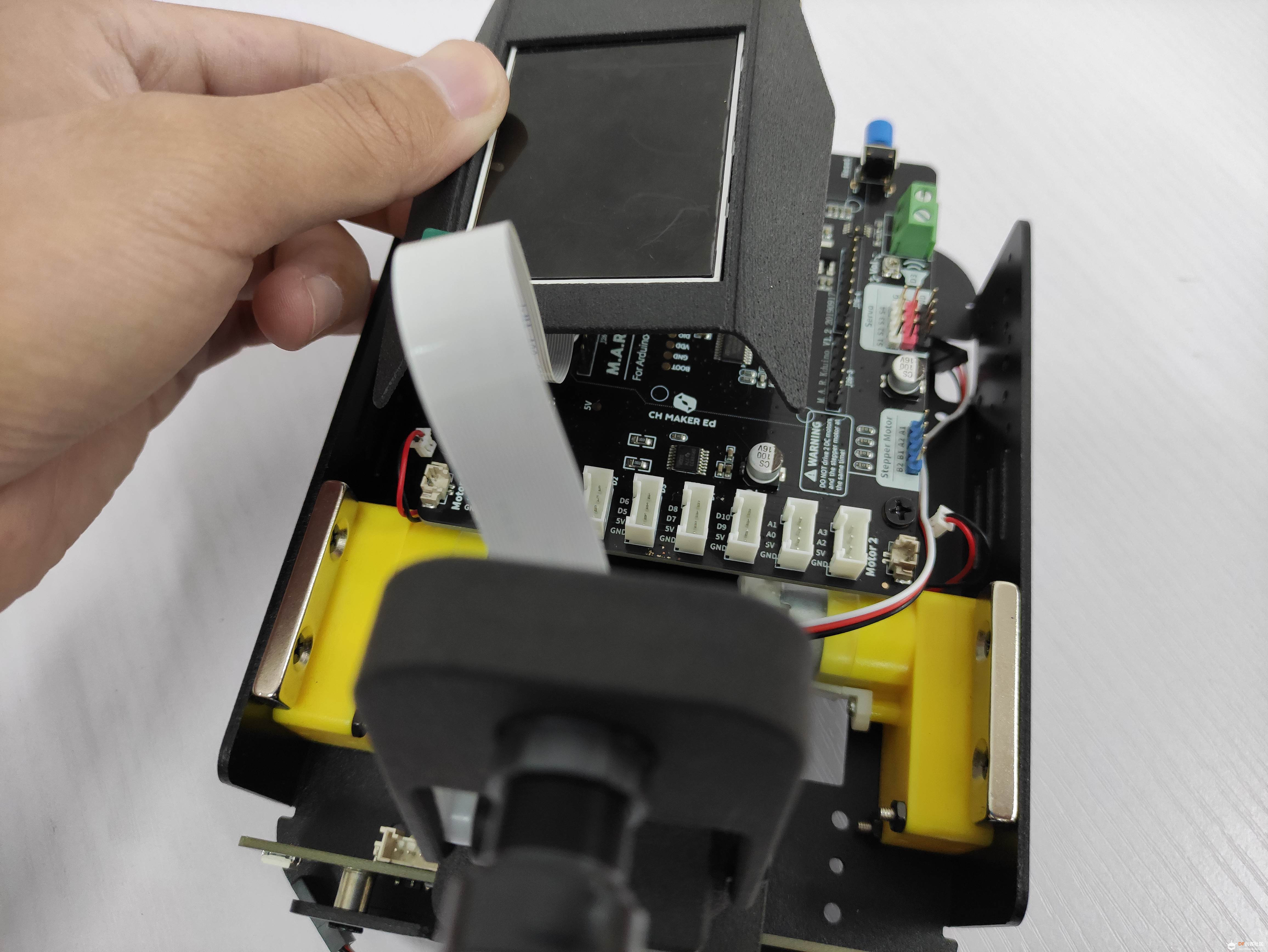
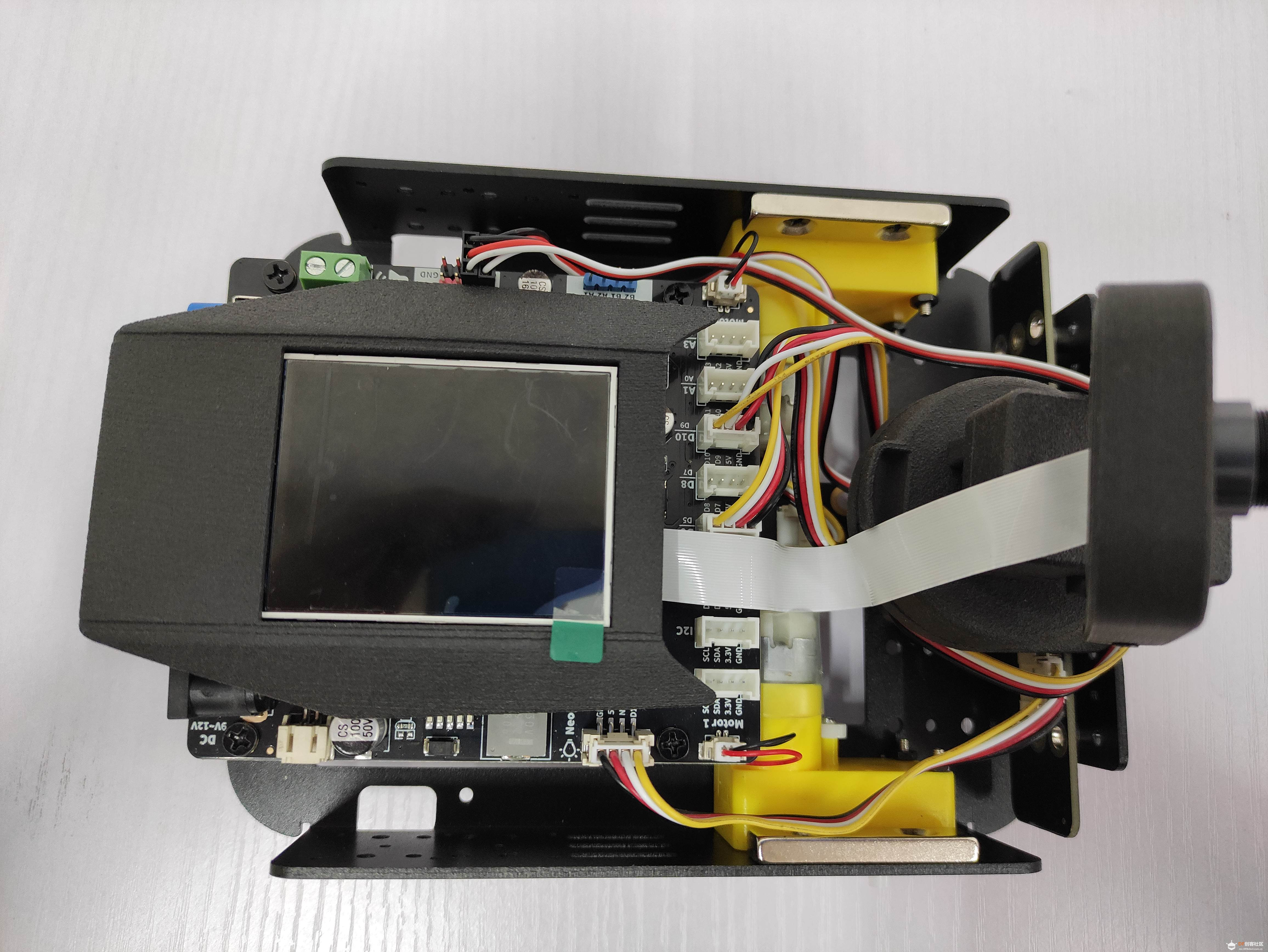
组装首先安装扩展板。取出扩展板,将白色 IO 插口一侧面向车头,用螺丝固定到车身的铜柱上。 后记因为小车供电用的是电池盒,需要 6 节 AA 5 号电池。这样很费电池。查阅手册看到也可用锂电池,电压 9-12V。刚好我有一个最高 9V 电压输出的充电宝。于是我把电池盒拆了,改用充电宝供电。 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

















 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 创作达人
创作达人
 小蘑菇
小蘑菇
 荣誉教师
荣誉教师
 ARD DAY
ARD DAY






