|
7754| 0
|
[教程] M.A.R.K|利用计算机视觉巡线 |
|
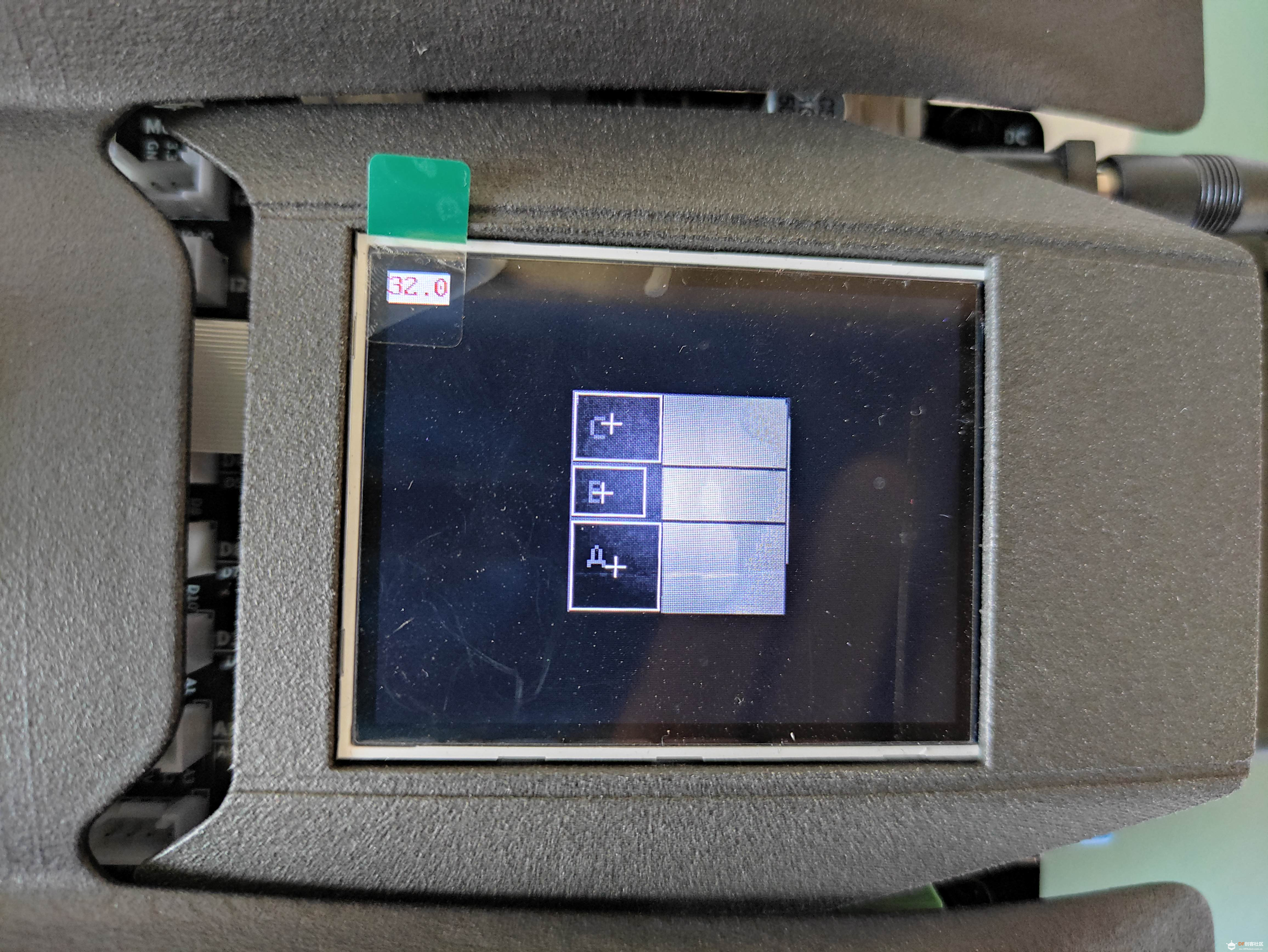
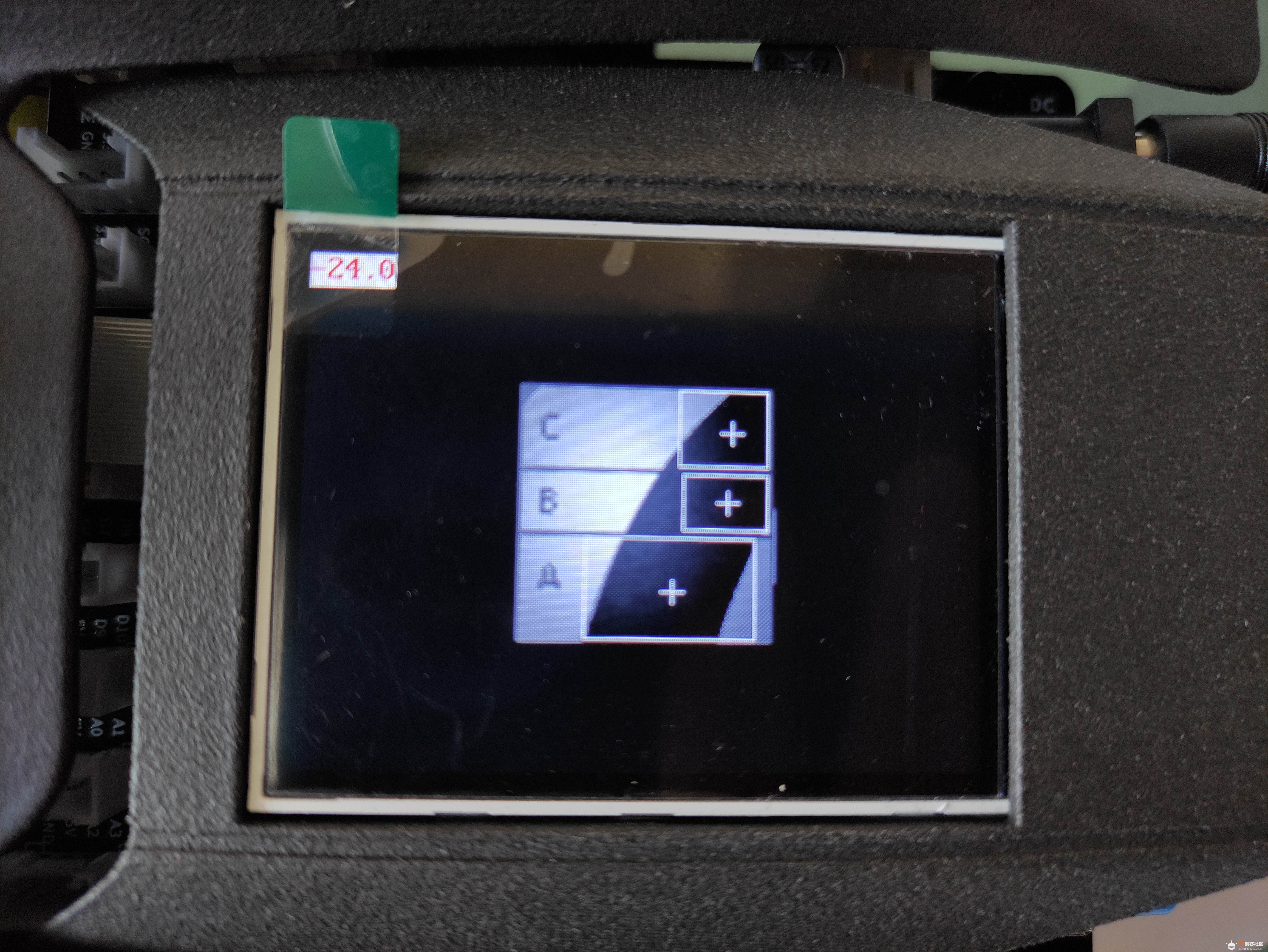
M.A.R.K 小车的摄像头捕获的实时画面经过 K210 芯片运算后可以计算出地图上黑线的偏转信息,我们可以根据偏转角度来让小车进行视觉巡线。 相关代码块介绍转弯角度
视觉巡线:转弯角度()速度(50)灵敏度(60)
编写代码首先从“底盘”分类下找到【视觉巡线:转弯角度()速度(50)灵敏度(60)】和【舵机(1)转到(90)度】两个积木块。 测试运行把小车放在地图上测试巡线效果。注意需要保持光线充足。 以上效果不是一次测试就能出来的。有时候小车会跑出黑线,回不来。所以需要修改程序的参数,比如灵敏度和速度。反复修改,调试,直到找到合适的数值。 巡线方法对比从代码量上来看,传统的巡线传感器巡线代码比较长,视觉巡线代码量少。传统的巡线传感器算法能够让学生很好地理解常规巡线的原理及代码编写过程。视觉巡线将原理背后的代码都封装成简单的一个代码块,直接调用即可,使用起来十分方便,降低了学生学习人工智能、无人驾驶的门槛。 建议强烈建议工程师修改一下屏幕的显示方式。目前摄像头画面是以屏幕长边为底边的,这样只能从小车侧面看屏幕。而巡线的时候我们一般站在小车后面观察比较多,这样对学生来说理解视觉巡线的原理更加容易。目前画面是 90 度垂直的,很难快速判断黑线在视野中的位置。 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed






 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 创作达人
创作达人
 小蘑菇
小蘑菇
 荣誉教师
荣誉教师
 ARD DAY
ARD DAY






