|
18652| 1
|
[教程] M.A.R.K|自动驾驶初探 |
|
本帖最后由 汤果 于 2020-6-28 07:40 编辑 项目介绍 利用 M.A.R.K 实现自动驾驶,要求能够正确识别交通标志,并按交通标志指示行驶。  思路分析 本项目的重点是交通标志识别。在“模型预测”分类下的<交通标志 检测结果为(左转)概率>(50)%>积木块可以检测前方的交通标志及其概率。  程序设计 小车启动后循环检测前方的交通标志。如果看到直行标志则前进,如果看到左转就左转,右转就右转,看到停车让行就停车。代码实现很简单。软件已经把交通标志识别的算法封装为一个积木块,使用时直接调用即可,无须事先学习交通标志。 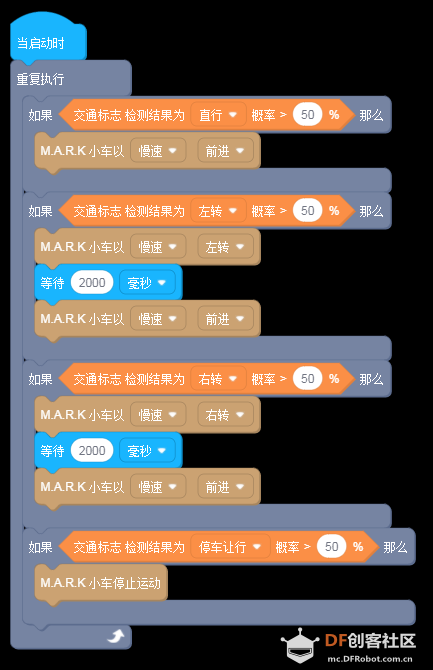 提示:可以适当修改识别概率,以达到理想效果。转弯的角度可以通过等待时间来调节。 效果演示 拓展提升 结合巡线传感器,实现自动驾驶 2.0,沿着地图行驶的同时遵守交通规则,按交通标志文明行驶。 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶

 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 创作达人
创作达人
 小蘑菇
小蘑菇
 荣誉教师
荣誉教师
 ARD DAY
ARD DAY






