|
41403| 25
|
[项目] 能跑能跳能遛弯,波士顿动力Spot的小跟班来了!项目开源! |

|
本帖最后由 RRoy 于 2020-8-3 10:40 编辑 前不久,相信大家都被机器人里的明星——波士顿动力的首款零售机器人 Spot刷屏过,
不过这款机器狗的价格,额……
大概折合人民币,大概53万的样子。 这就有点尴尬了,我也想亲手玩弄一下最前卫,科技感十足的机器狗,还有什么办法呢? 有!斯坦福Pupper或许是个不错的选择!
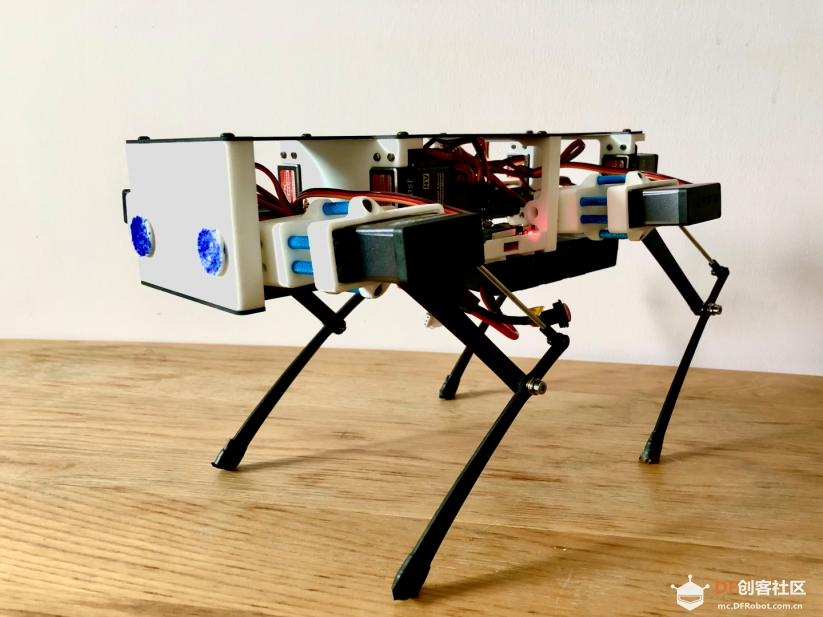
斯坦福Pupper是一个小型化的四足机器人,能跑能跳能遛弯。 相对亲民的价格搭配简单的设计,可以让帮助K-12和大学生以及其他机器人爱好者自己动手DIY一个有趣能动的四足机器人!
用户能够根据自己的需求来调整、扩展机器人功能。 包括不同的步态(慢走,奔跑等),如叼东西或跟着你走等“高级”行为。 贴吧已经有小伙伴做了,
比如说,蹲坑没纸了,让贴心的Pupper帮我们送过来。
至于价格,官方给出的Pupper套件的参考价如下:
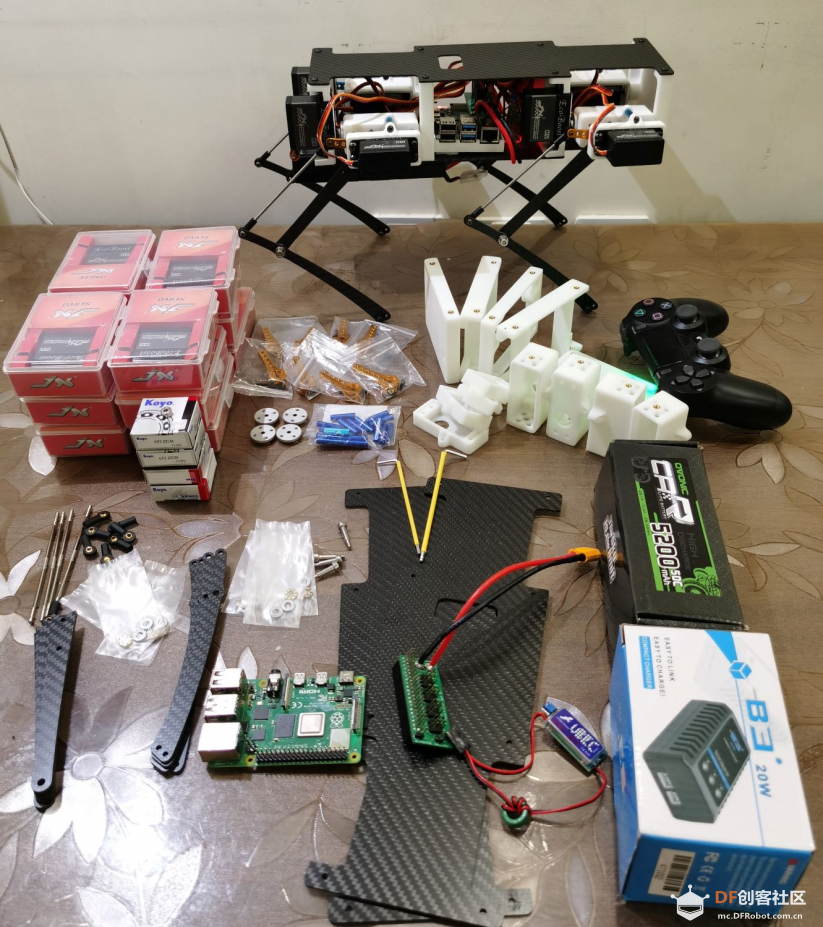
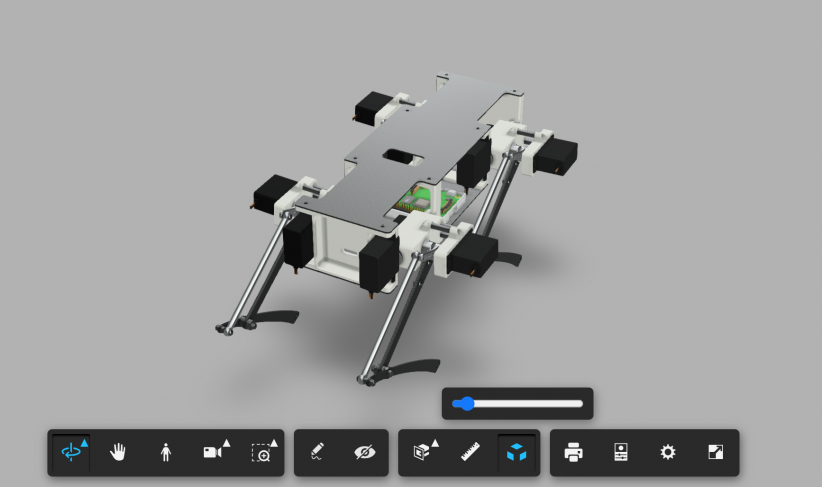
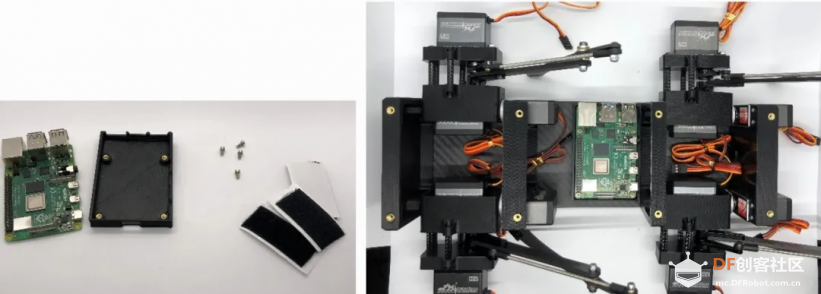
官方验证过质量的两家商家: 2、MangDang 第二家是国内的商家,整套物料打包在5000元左右。 不过,由于这个项目是GitHub上的开源项目。CAD图纸、物料清单、构建的说明文档一应俱全。 自己DIY具体费用,取决于我们已经拥有的工具和零件,例如Raspberry Pi,PS4控制器或电池充电器等,自己组装一个,官方预估的成本在800——4500元不等。 让我们开始Pupper之旅吧。 文末有Stanford Robotics Club 完整展示视频!!! 正文概要为了让组装简单有趣,需要烙铁焊接的物料,我已经提前做了焊接,组装过程中不需要用到烙铁。 下图所示为组装好的Pupper和未组装的所有物料示意图。
关于成本,如果从美国购买组装物料,成本低于$1000的可能性很小(还不包括损耗),最让人心急的是快递时间,赶上疫情,快递的时间鬼神莫测。 不过已经有国内玩家打通了供应链,所有物料都可以快速搞定,详细见后面的连接。 有条件建议可以购买组装好的Pupper,上手快,也方便练习拆解与组装; 第一次DIY不建议使用胶水,熟练后再上胶水,否则后悔莫及; 如果已经下定决心自己组装了,可以参考下面组装说明,一起玩起来! 1.安装伺服码盘
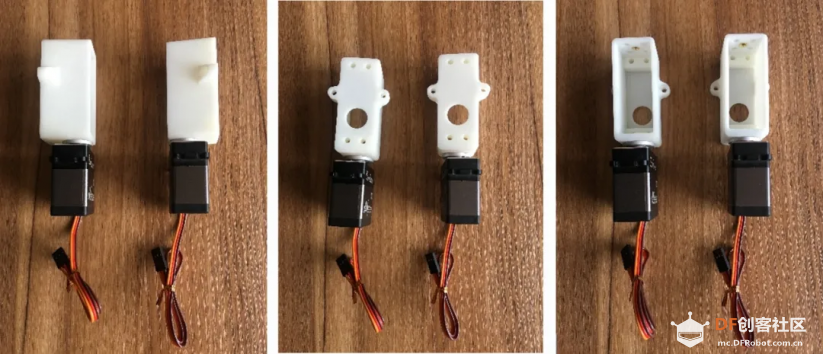
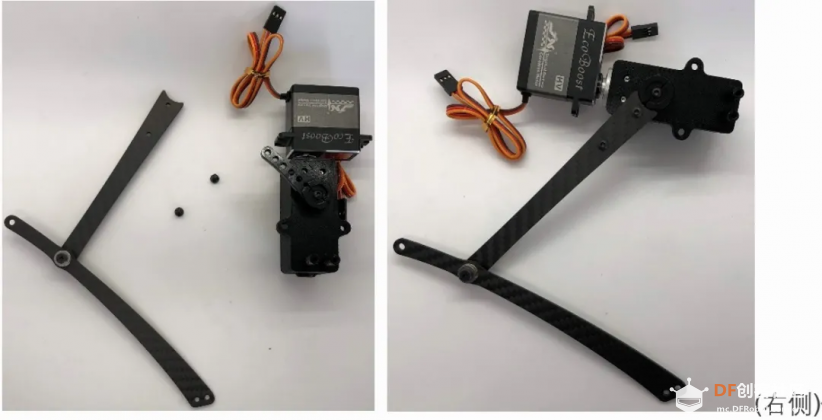
2. 连接码盘和大腿根伺服内框按照90°角度连接,并拧紧M3x8螺钉(如图所示 ),组装前,过程中及后的示意图(注意左右腿的方向)。
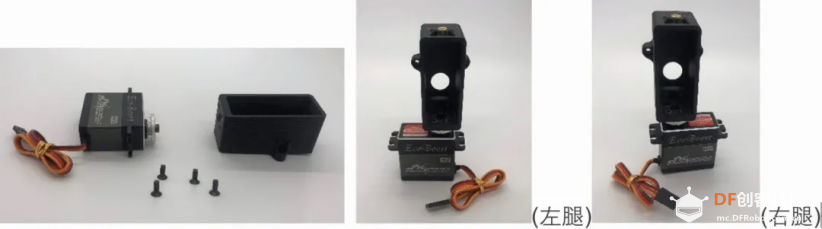
3. 安装大腿根内框伺服
4. 安装大腿根内侧伺服臂
5. 腿部把物料摆放好后安装,顺序分别是:带肩螺栓、分体式轴承、下部小腿、分体式轴承、上部大腿、锁紧螺母。
6. 连接大腿和伺服臂
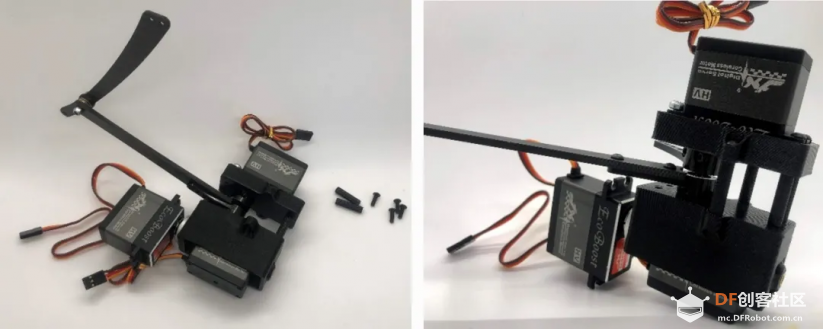
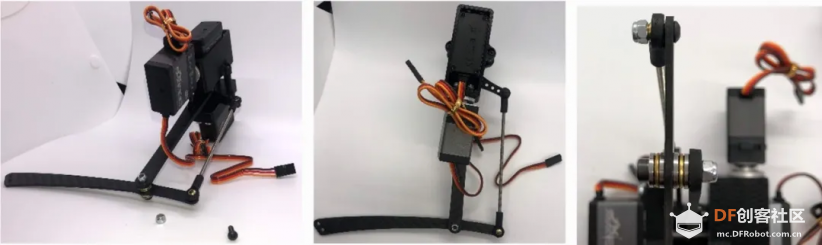
7. 大腿根外部将伺服放入3D打印的框中,并用两个M4x10mm螺钉加固定。
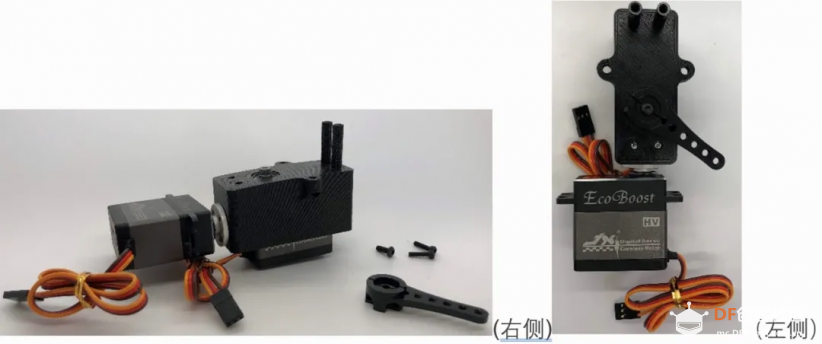
8. 大腿外侧伺服安装
9. 连接大腿根内外部
10. 加入另外2个支柱用4个M3x10mm螺钉分别固定另外2个支柱。
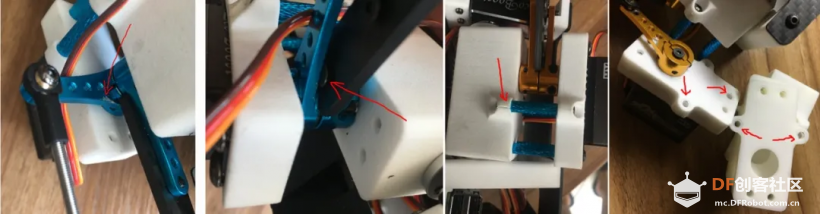
11. 测试每个伺服器的整个运动范围
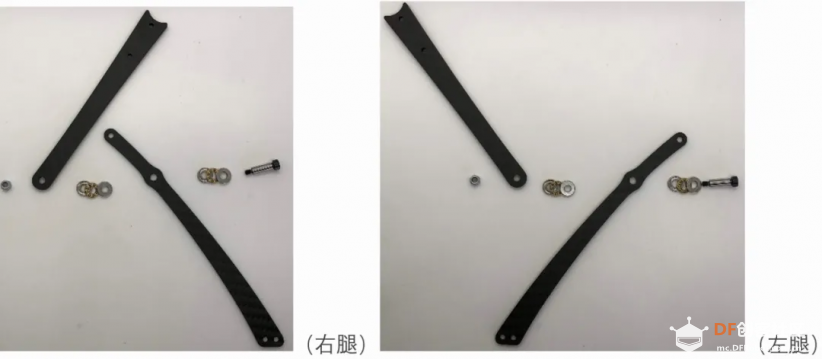
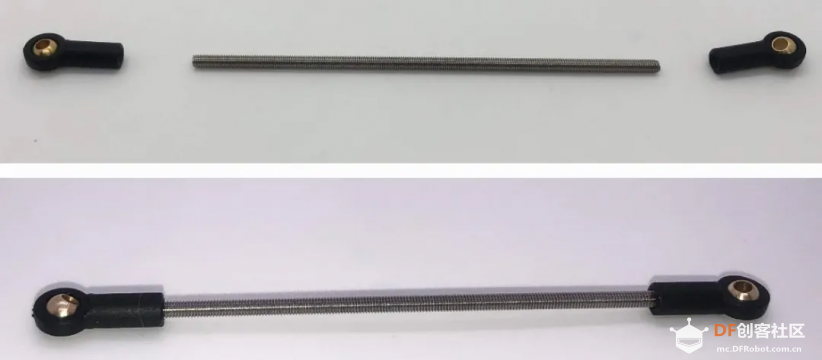
12. 组装大腿延长杆均等地拧紧杆端,直到杆上最远的孔间距与上腿连杆上的孔(伺服臂中心到最后一个碳钻孔点)相匹配为止。
13. 将延长杆连接到伺服臂从内侧(注意分清左右腿的内侧),用M3x10螺钉将延长杆固定到伺服臂上。
14. 将延长杆连接到小腿将M3x10螺钉穿过碳纤维件,然后穿过杆端,使用内六角扳手拧紧时,使用扳手将M3防松螺母固定到位。
关键的骨架已经完成,后续身体部分的组装就是“面子”工程了,颜值当道的时代,面子工程不容小觑!
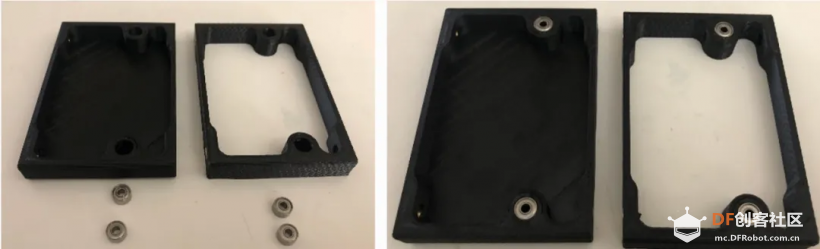
15. 将轴承压入指定空位将两个轴承压入最前面3D打印支架的两个孔中(称为“前前部”),将另外两个轴承压入后面一块的两个孔中(称为“后前部”)。
16. 固定大腿部
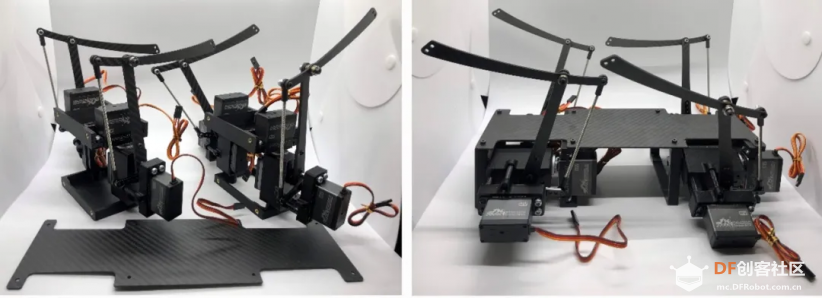
17. 把组装好的腿/身体支架固定到身体底部碳纤维板上用16个 M3x6 螺钉把之前组装好的部件固定在底部碳纤维底板上。
18. 组装树莓派板子
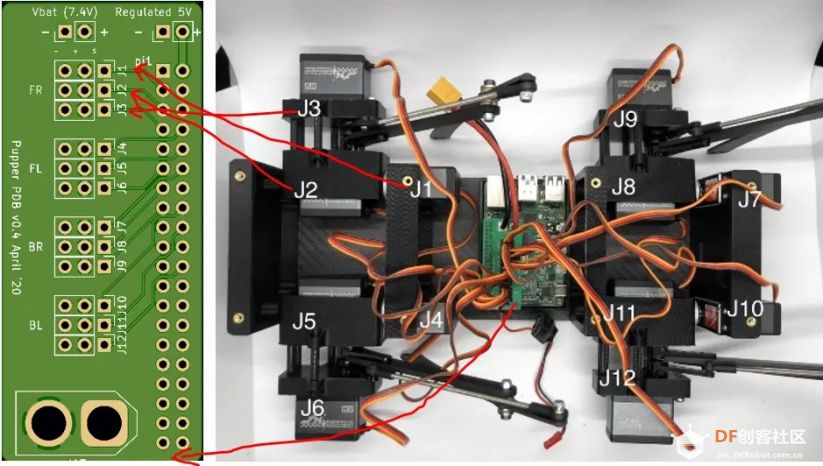
19. 组装电源板,连接伺服到电源板
大功告成,牵着Pupper上路吧! 哪里购买物料?下面提供的链接是 BOM list: 上不了谷歌的小伙伴可以参考石墨链接: 如果想便宜并节省时间,可以通过某宝一站式购买所有物料:
组装手册如下是英文版本的组装手册: 设计文档如下链接是 Fusion 360 CAD model: 如下连接是电源板PCB文件: Pupper源代码主仓库链接如下: 根据里面的README可以创建环境,创建的过程中,还会用到如下仓库: 文中项目来源:https://stanfordstudentrobotics.org/pupper 部分图片来源于百度贴吧机器人吧chenxiangwei、知乎机器之心,文档部分转载于公众号趣无尽,侵删。 附:斯坦福机器人俱乐部演示视频 |
mangdang 发表于 2020-7-23 10:23 您可以在这里留个言(https://mp.weixin.qq.com/s/ryOR2lJi3f-3R7e3vhXd5g),我们交换一下联系方式! |
mangdang 发表于 2020-7-23 10:23 你们太低调了,购买链接在你们自己的网页上都不好找! |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

















 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 必需加精华
必需加精华 。能做个心愿单么
。能做个心愿单么

 萌萌哒新人
萌萌哒新人
 宣传大使
宣传大使
 小蘑菇
小蘑菇
 ARD DAY
ARD DAY
 编辑选择奖
编辑选择奖
 摸鱼团员
摸鱼团员
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖






