|
1915| 1
|
自己动手造个球平衡机器人 |

|
本帖最后由 RRoy 于 2025-8-12 16:00 编辑 你是否曾对那些能够精妙地保持平衡的机器设备感到好奇?
这个项目源于一位创客的亲身实践,他从零开始,通过这个项目掌握了传感器、控制系统和逆运动学等核心知识,甚至学会了如何系统性地解决问题。它非常适合新手,也为那些希望将理论知识付诸实践的学生提供了完美的平台。
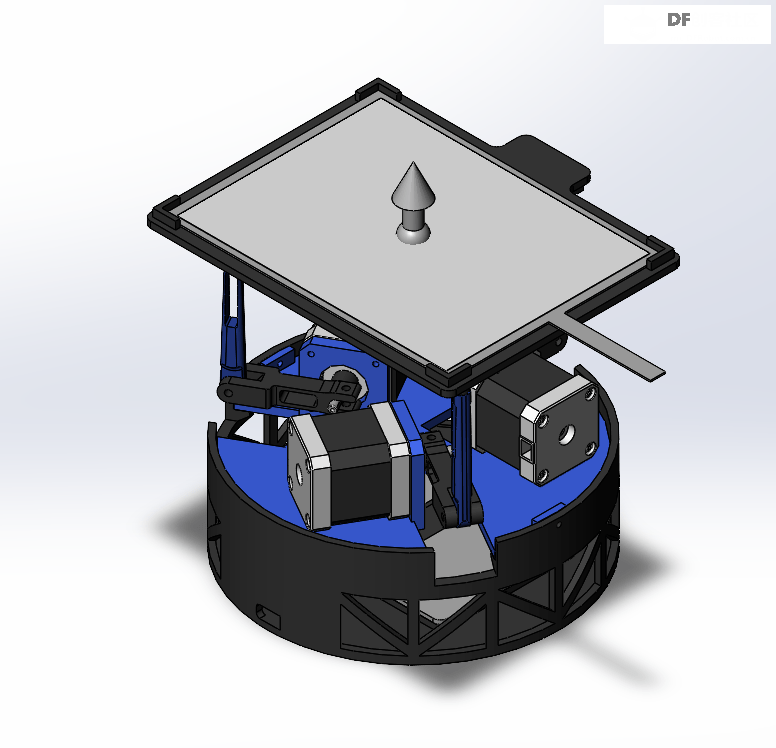
项目解析:三足鼎立的“平衡大师”球平衡机器人,从工程角度看,是一个精巧的“三维平面并联机构”(3-RRS parallel manipulator)。你可以把它想象成一个由三条腿支撑的托盘。当小球偏离中心时,这三条“腿”——也就是三个步进电机——会协同工作,精确地调整托盘的倾斜角度,就像一个经验丰富的服务员在托盘上保持酒杯平衡一样,最终让小球始终回到中心位置。
那么,它到底是怎么做到这一切的呢? 简单来说,整个过程遵循一个闭环控制系统:
准备材料要打造这个机器人,你需要准备以下核心部件和工具。
每个选择都有讲究:
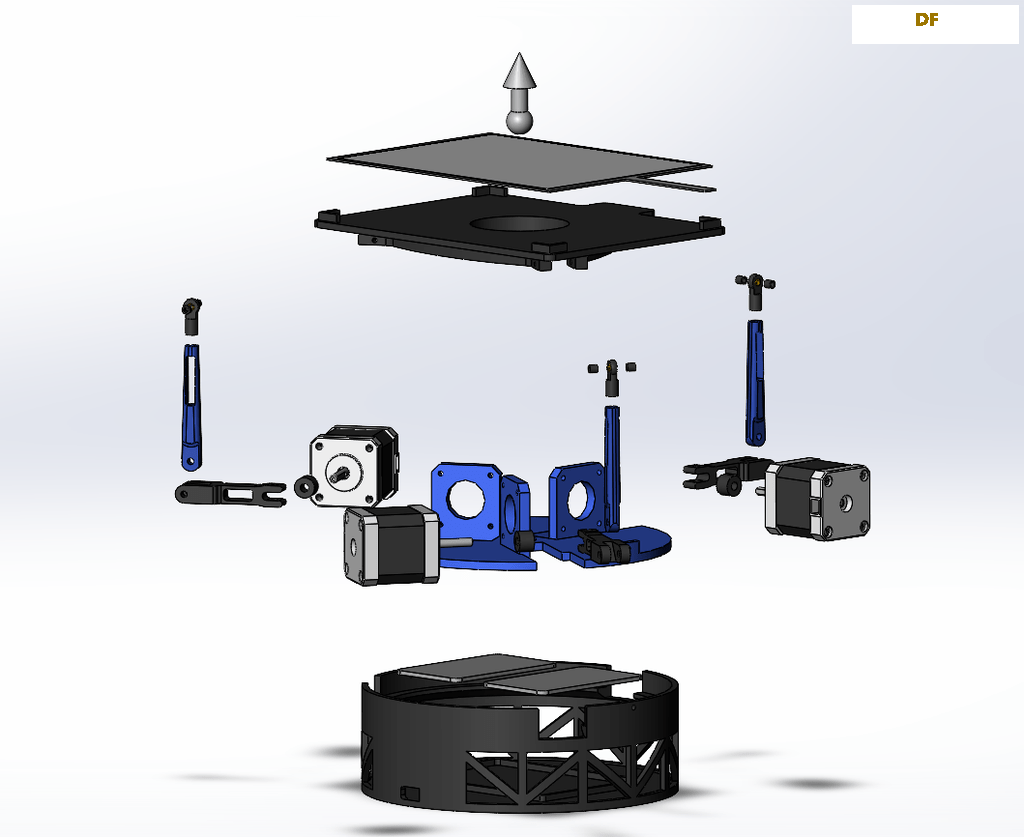
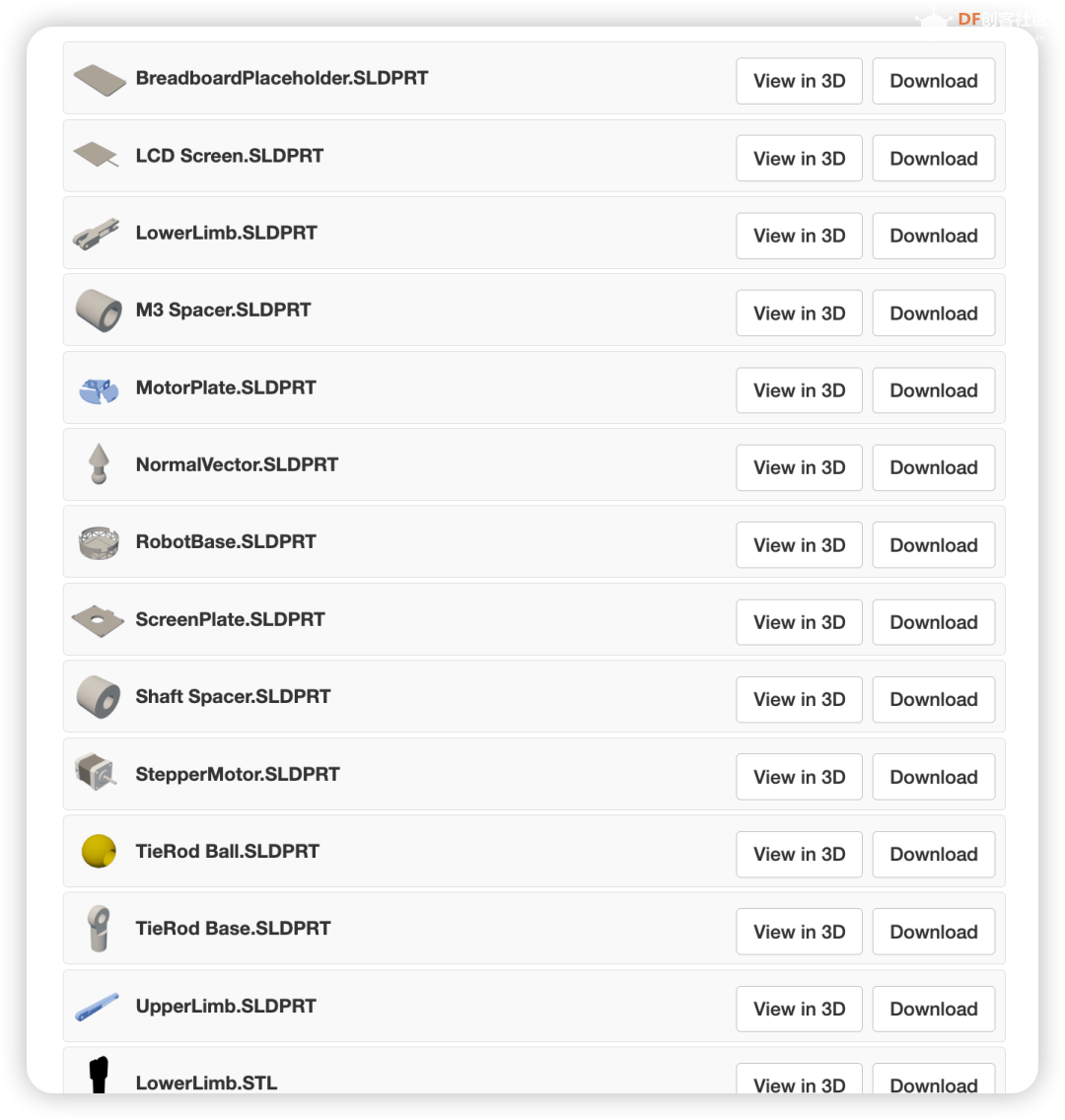
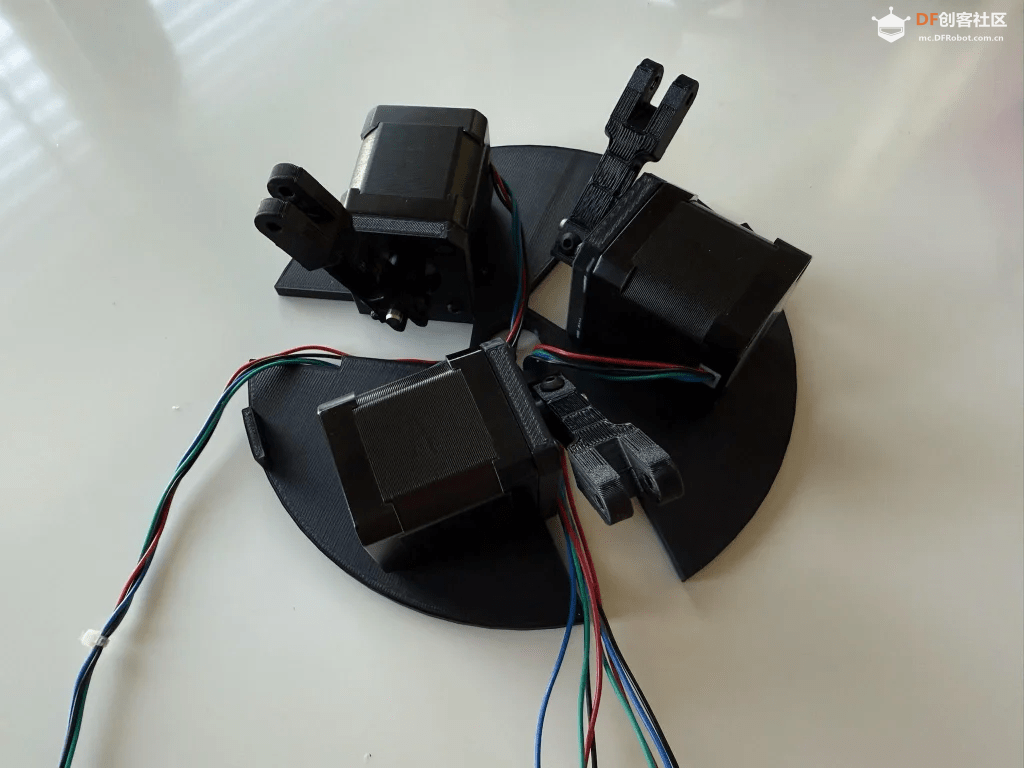
机械结构制作项目最酷的部分之一就是它的机械设计。作者使用了 Solidworks 设计了所有的机械零件。好消息是,你不需要自己从头设计,作者已经将所有 3D 打印文件开源,你可以直接获取文件并进行打印。这一步主要是将各个零件打印出来,为后续组装做好准备。
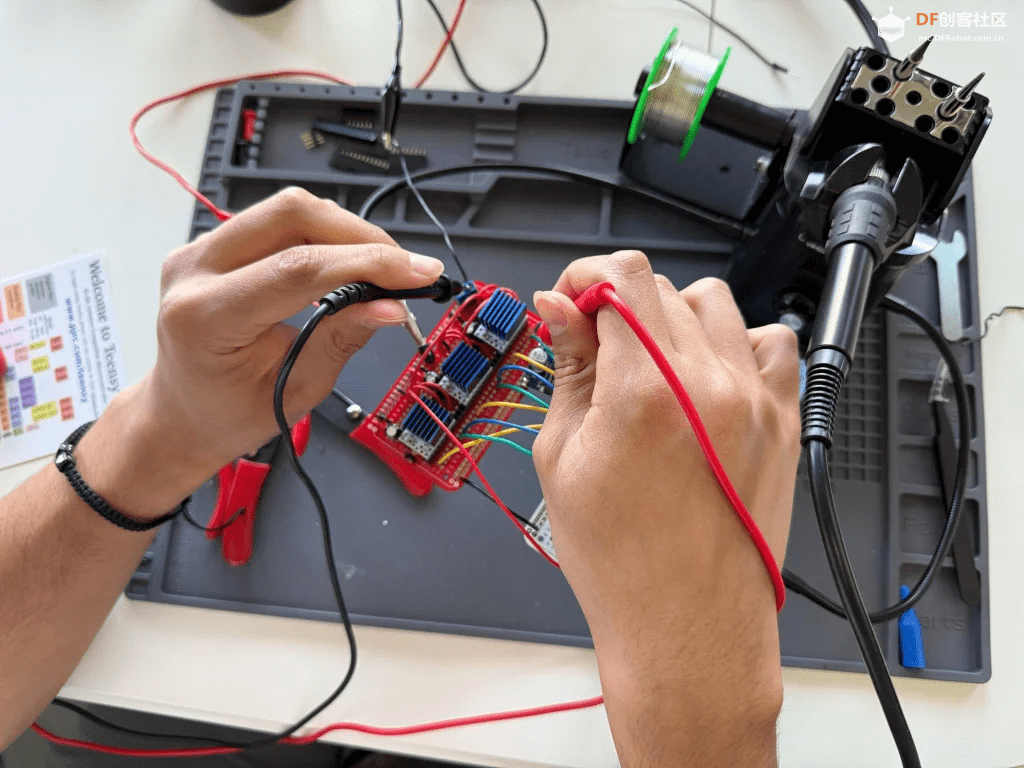
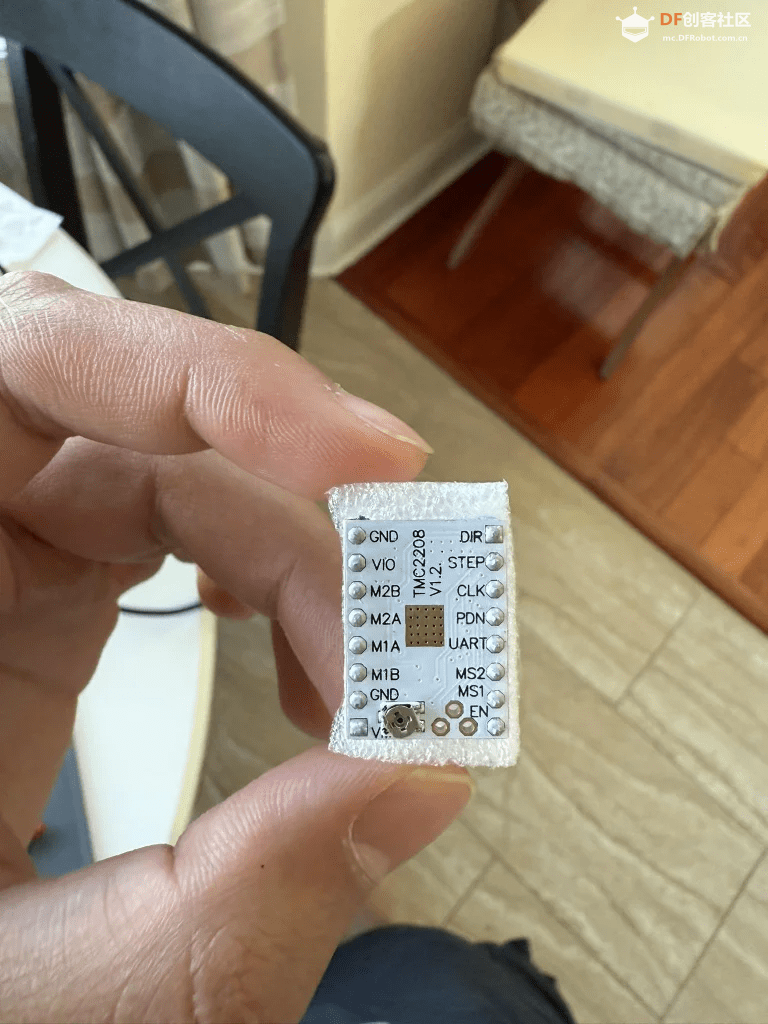
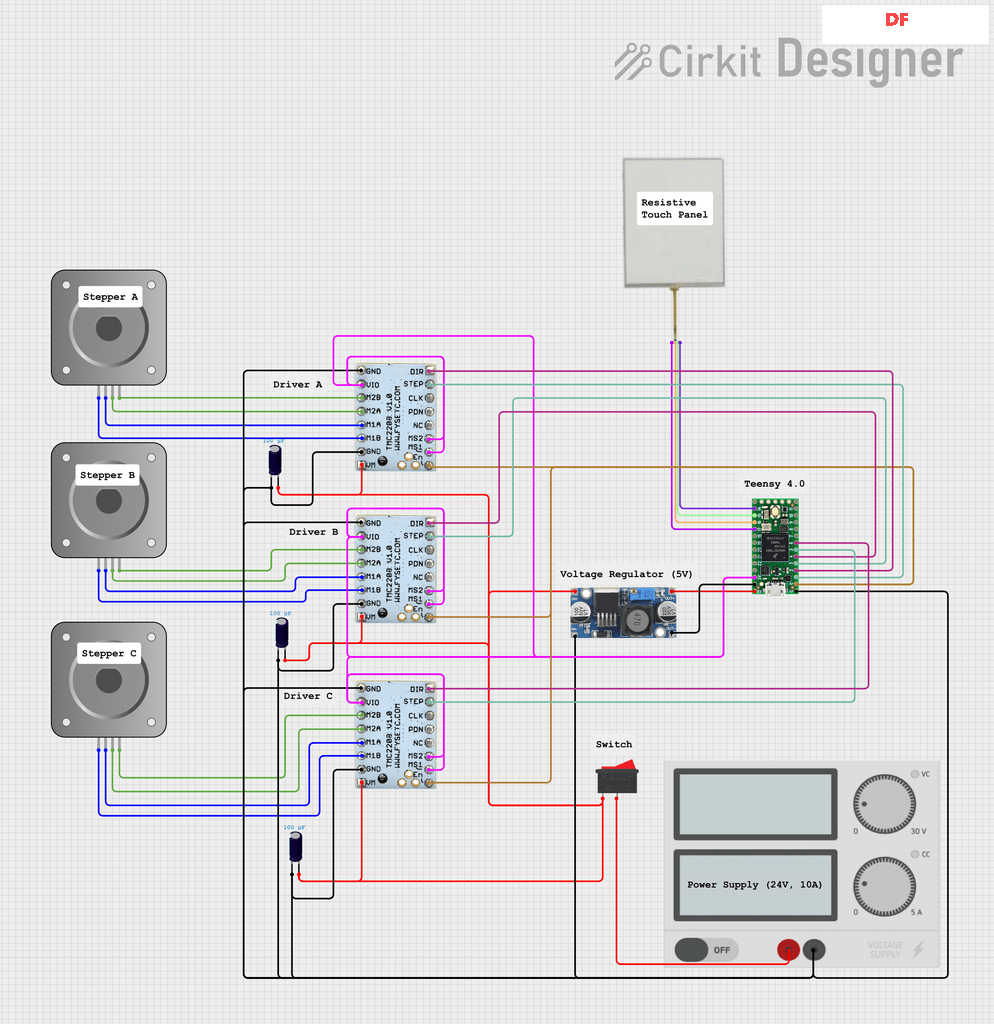
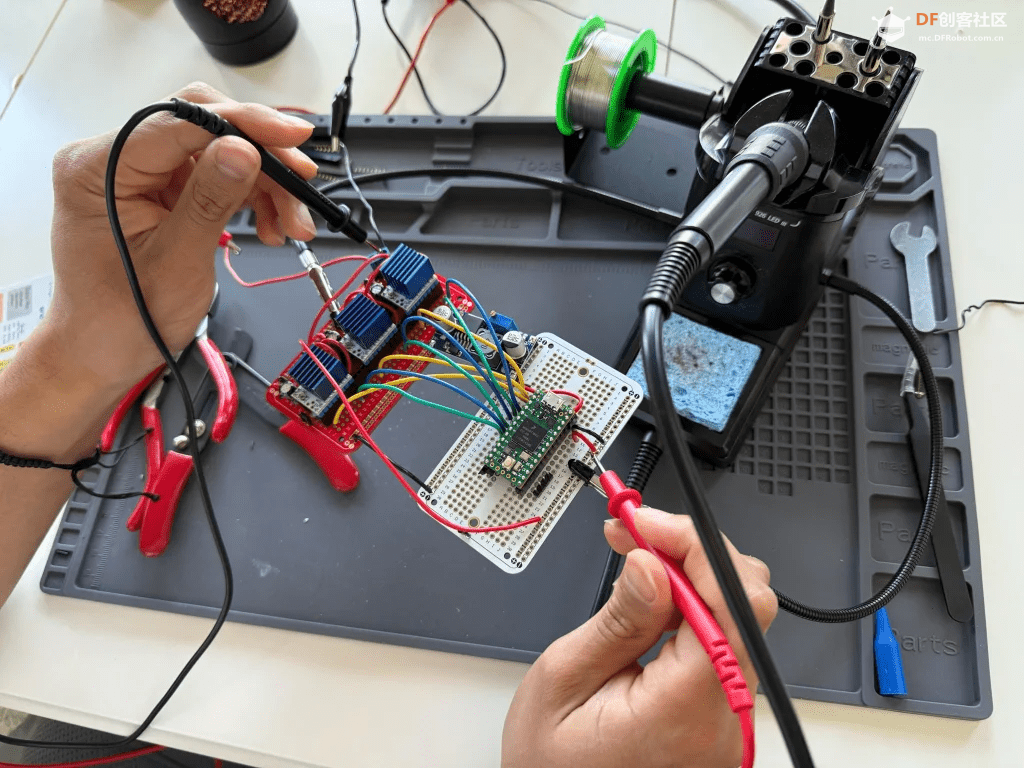
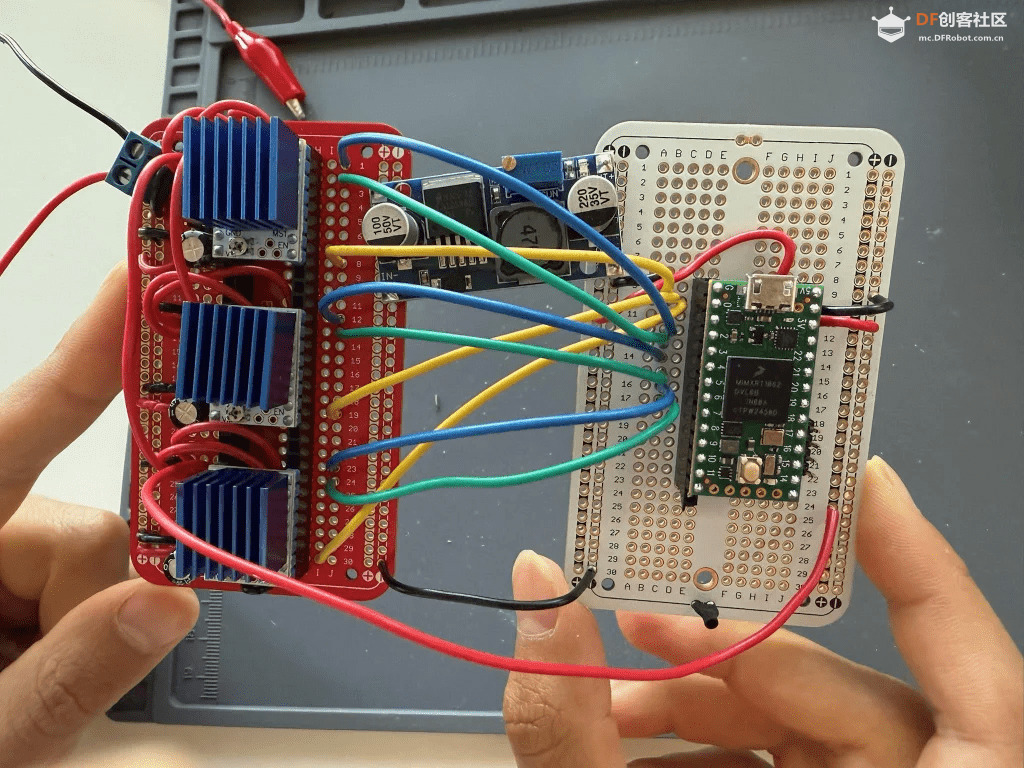
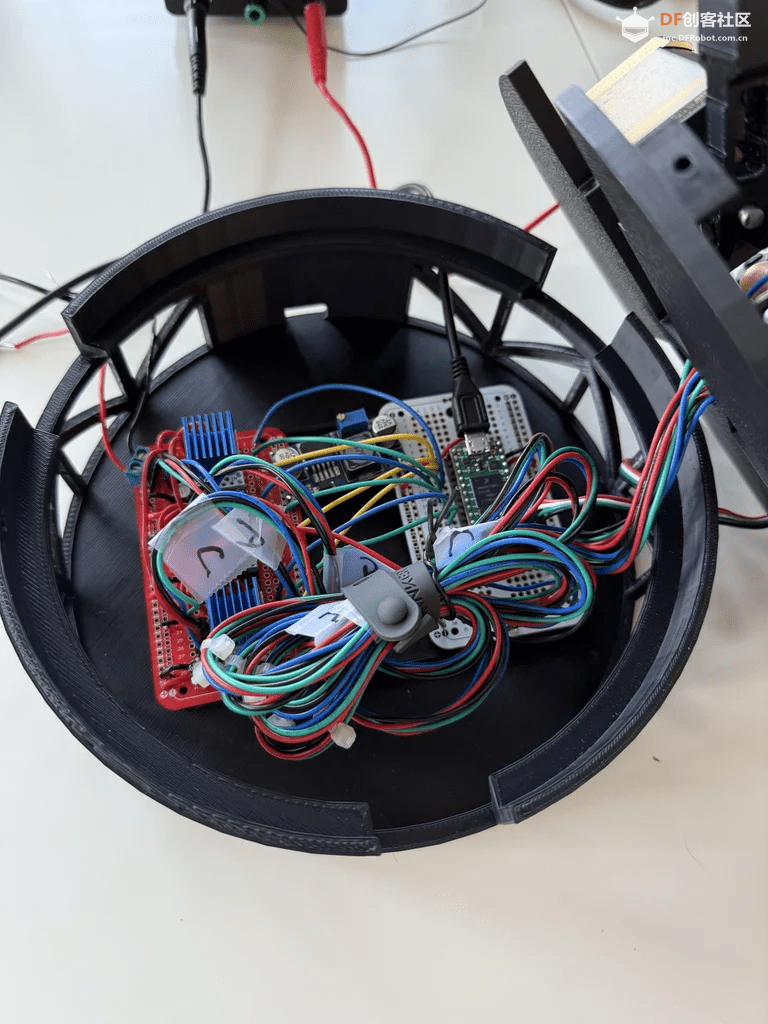
电路搭建这是项目的核心“神经系统”。
你需要根据项目提供的电路图,将 24V 电源、三个电机驱动器和 Teensy 4.0 微控制器连接起来。由于电机需要高压,而微控制器需要5V,因此需要一个稳压器将高压降下来。这一步考验的是你的焊接和电路连接能力,务必确保连接正确、牢固。
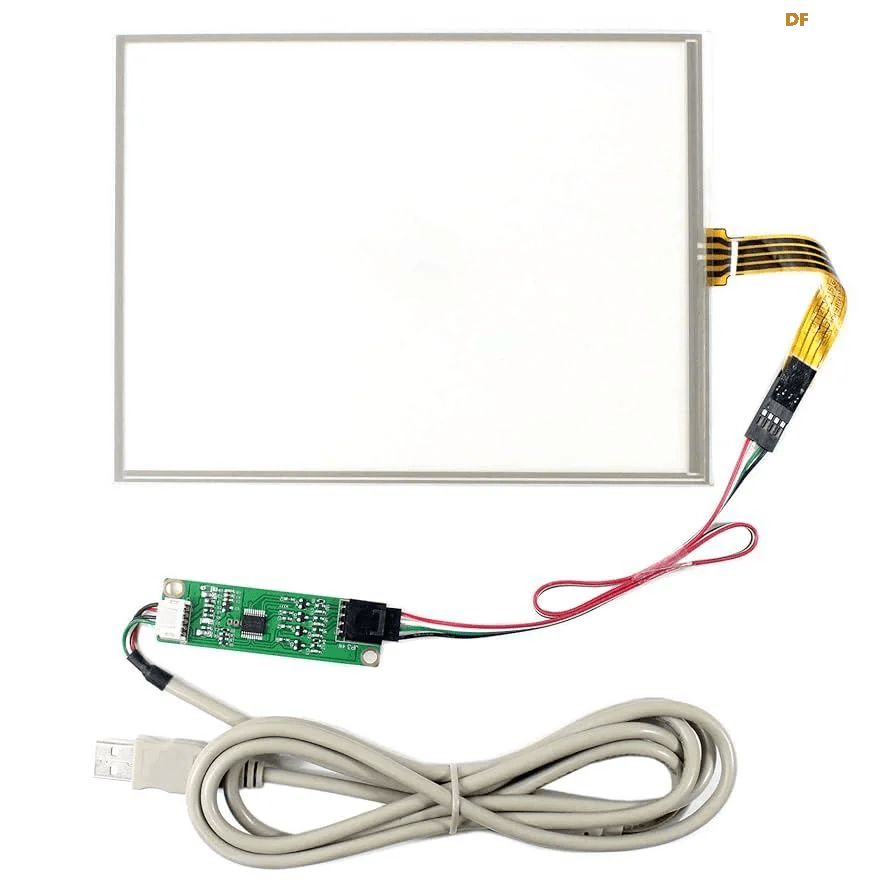
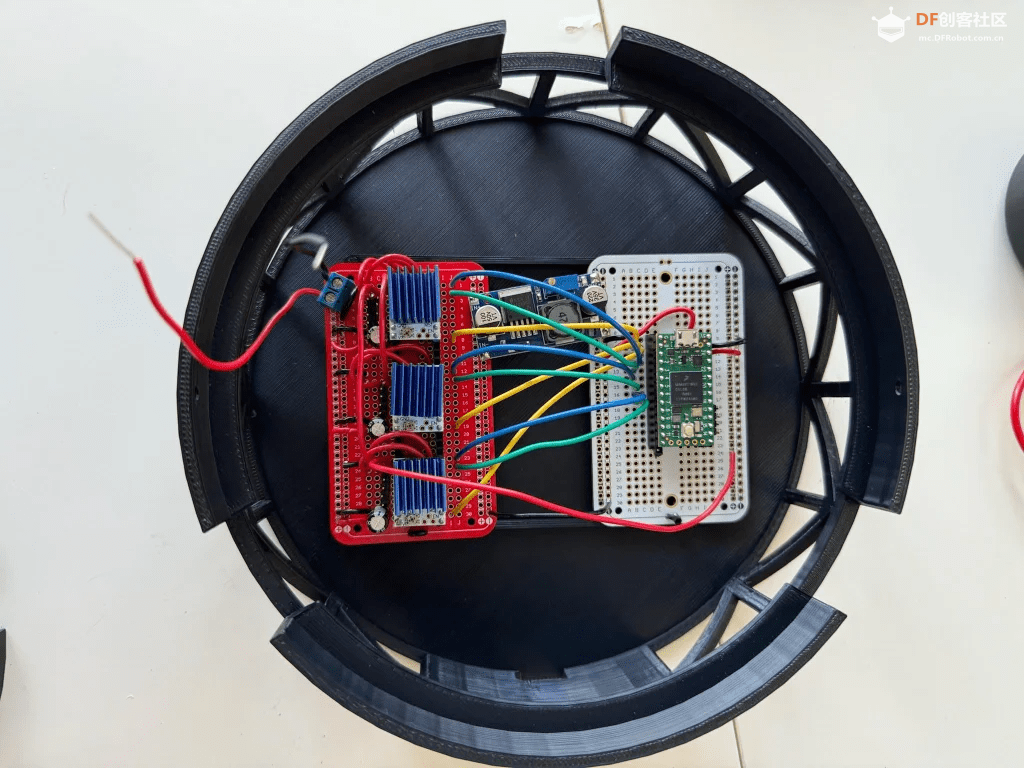
物理组装将 3D 打印好的零件、电机、电路板和触摸屏组装在一起。这个过程需要一定的耐心,将每个部件都按照设计图纸安装到位,确保机械结构能够顺畅地移动,没有卡顿。
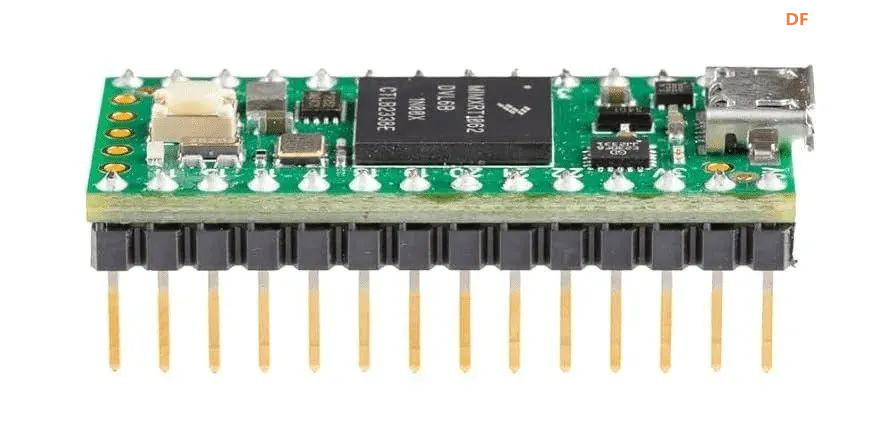
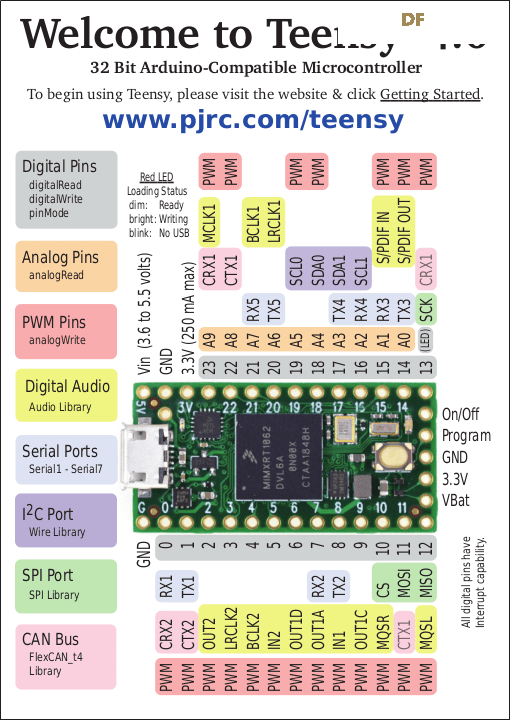
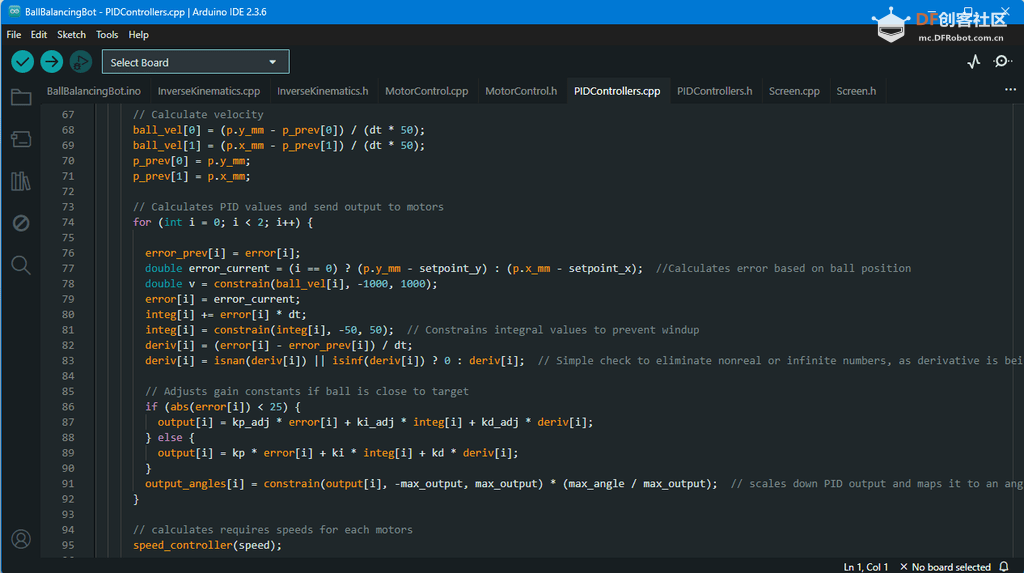
程序代码上传与调试赋予机器人“生命”的关键一步。你需要将项目的代码上传到 Teensy 微控制器中。
代码包含了用于驱动电机、读取触摸屏数据以及实现平衡算法的所有逻辑。上传代码后,你还需要进行校准(Calibration),告诉机器人平台的水平位置,并调整 PID 参数,让它能够更平稳地控制小球。
完成以上步骤,你的球平衡机器人就大功告成了。当你亲手制作的机器人,在代码的驱动下,精准地保持小球的平衡,那种成就感是无与伦比的。 |

11.88 MB, 下载次数: 3187



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed







 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 萌萌哒新人
萌萌哒新人
 宣传大使
宣传大使
 小蘑菇
小蘑菇
 ARD DAY
ARD DAY
 编辑选择奖
编辑选择奖
 摸鱼团员
摸鱼团员
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖






