|
4684| 0
|
基于AS7341的室内可见光定位实验:1.AS7341试用与方案设计 |
|
感谢这次主办方提供试用Gravity:AS7341的机会。 闲话不说,首先是(伪)开箱。包装很简单,一个传感器+ 一条连接线。  然后是常规测试,产品维库 里写的很详细。 简单来说就是下载库文件 DFRobot_AS7341-master,按照 Readme.md 中的描述,放到 \Arduino\libraries\ 下面,再随便打开example\ 下面任意一个文件,就可以测试了。 我这里选的是 getData,获取10个光通道数据的sample:  测试结果一(黑暗环境): 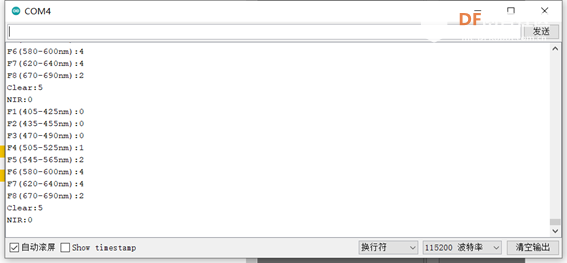 测试结果二(开手机LED灯): 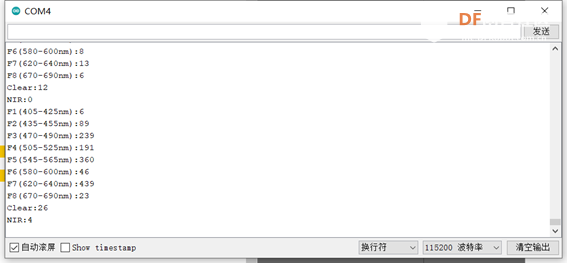 可以看到F3(红)、F4(橙)、F5(黄)、F7(蓝)的通道数据明显上升。 本来还想测试50/60Hz闪烁频率的,但是手头暂时只有一块主控,没办法测。 ---------------------------------------- 试用就到这里,接下来说下实验方案。 基本设想很简单,就是在一定区域内设置若干LED光源,测量AS7341与各光源之间的距离,通过三角定位法计算出所在位置。 根据测试结果,AS7341能够分辨不同波长的光,因此可以在实验中设置红、黄、蓝三种LED光源,用于定位。 不过这里的难题有两个,一是如何避免环境光的干扰。我想这个可以在先测定初始状态下的环境光强度,然后再开启LED灯。 二是如何测量光源距离,这个问题查了不少解决方案,但好像都不太适合。目前我打算采用最笨的方法,预先测量出不同距离下的LED光源数值,获得一张光强-距离表,然后再用实验中得到的数据倒推距离。 大概设想就是这样,也欢迎大家指点更好的方案。 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶






