|
12998| 6
|
[项目] 感知生长——桌面植物景观 |

|
【项目源起】 去年DF社区举办了一场主题为“创客大作战暖冬行动”比赛,当时我从淘宝上购买了种子和种植盆,并利用掌控,制作了一个基于物联网的种植项目。今天,我们将对其进行改造,使其更微型化,智能化,既具备植物水培的功能,又能作为植物景观摆放在桌面上。项目展示如图1。 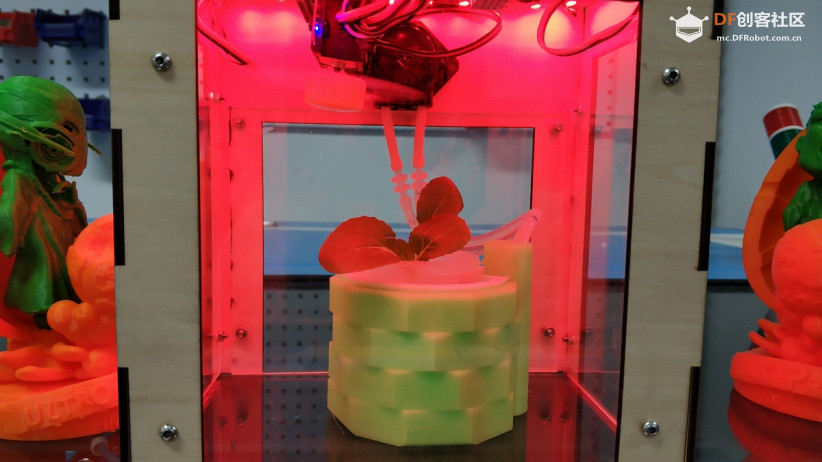 【项目展示】 桌面植物景观系统具有三种工作模式:加速模式、景观模式、休息模式,如图2—4所示。 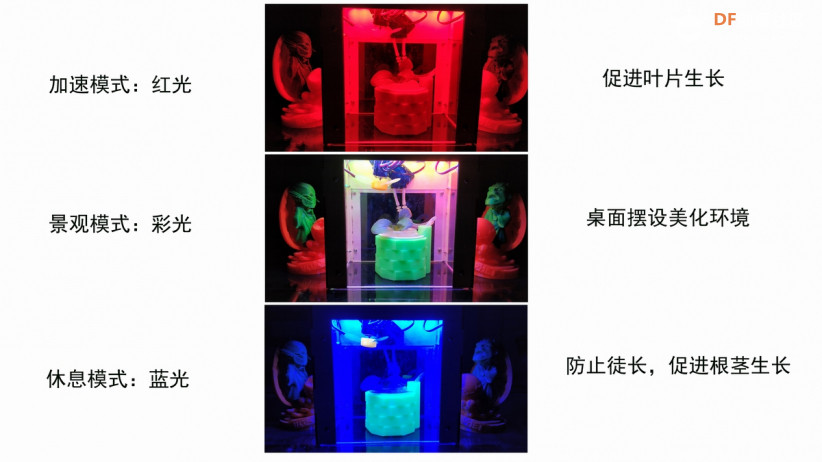 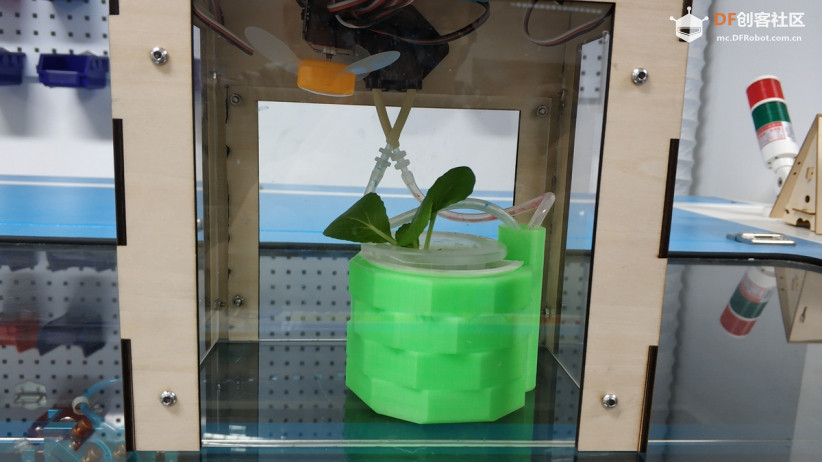  【功能简介】 (1)智能水培:通过微环境控制系统采用无土栽培方式,集成模拟了植物生长所需要的阳光、空气、水和养分等自然环境,使种植不受天气和环境的影响,全年生长。该控制系统带有一个蠕动泵,加速模式下工作保持水体含氧量有效防止植物烂根。 (2)分类模式:该控制系统可设定三种模式:加速模式、景观模式、休息模式。 (3)空气流通:该系统带有风扇,加快空气流通,促进植物更好呼吸,为种植提供良好的植物生长环境。。 (4)感知生长:使用HuskyLens视觉识别传感器对植物进行感知,当植物叶片出现增大,则触发拍照记录植物照片到TF卡中。 【硬件材料】
【制作过程】 1.系统设计 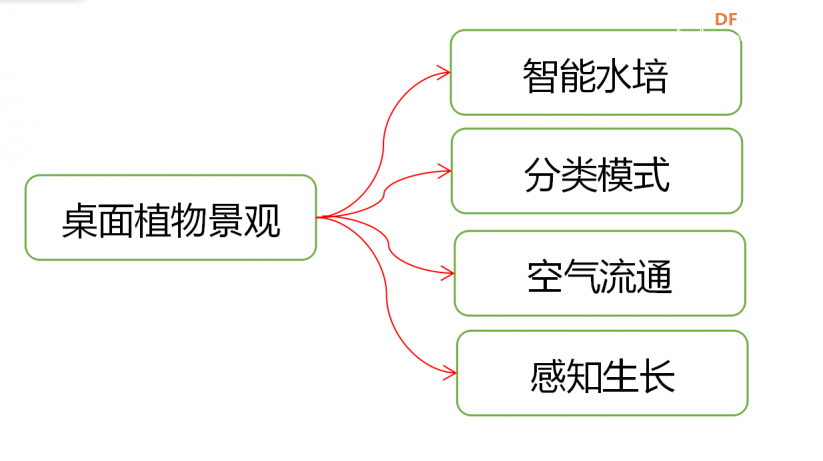 桌面植物景观系统有三种工作模式:加速模式、景观模式、休息模式。加速模式使用红光加速植物进行光和作用,促进植物生长,同时蠕动泵工作,加快营养液循环,防止植物烂根;景观模式使用彩灯达到一种点缀环境氛围的效果,可作为桌面摆件装饰环境;休息模式使用蓝光,促进植物根茎部发育,防止植物疯长、徒长。 2.结构设计 本次作品结构设计涉及两部分,一部分是激光切割松木板和亚格利板,用作系统结构。另一部分是3D打印的自浇花的花盆和摆件,作为水培种植盆。框架结构设计,使用LaserMaker绘制结构图。3D打印的自浇花花盆从网上下载。 (1)框架结构件设计(松木板) 首先以3mm厚的松木板为原料,使用“快速造盒工具”,生成一个盒体。然后删除盒体底部,并对前后左右四面绘制出窗体,用于安装亚格利板,并绘制螺丝孔位。最后在盒体顶部,绘制主控及相关传感器安装孔位。具体设计如下图7所示。 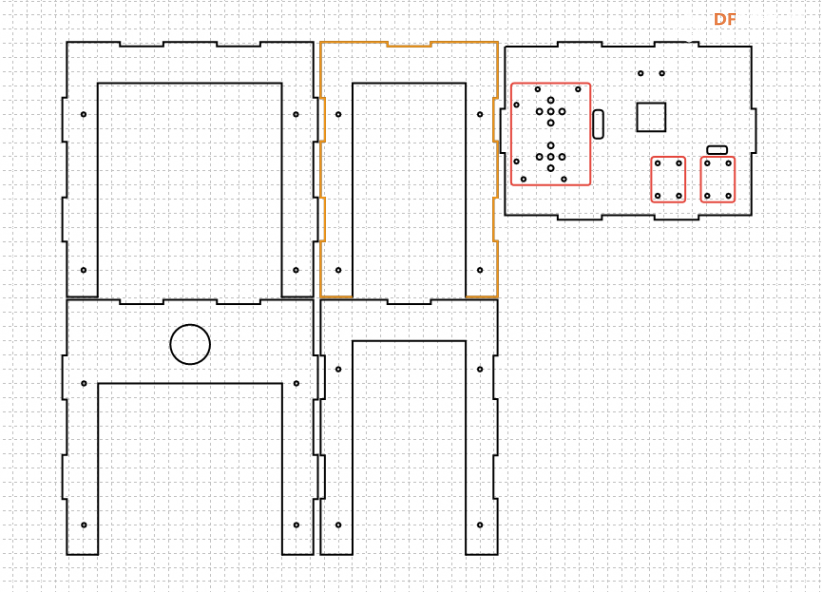 (2)窗体设计(亚格利) 以3mm亚格利板为原料,绘制下图所示的矩形(尺寸见模型文件),并定位螺丝孔,与图7的结构件能吻合安装。此部分需要切割两份。 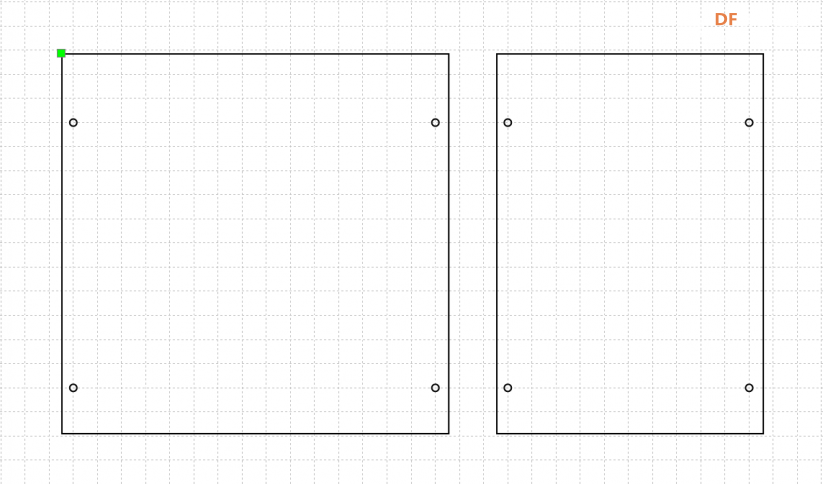 3.电路连线 装置电路连接如图11所示。两个迷你巡线模块分别接D7,D8口,人体红外传感器接D2口,RGBLED接D10口,继电器接D12口。 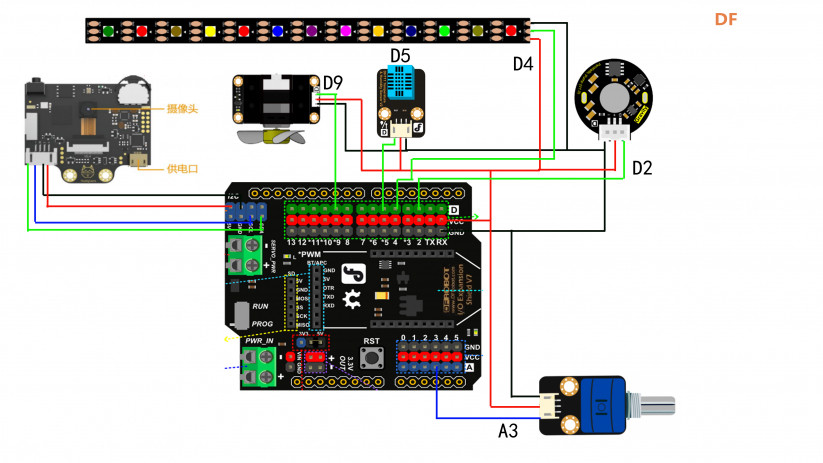 4. 代码编写 主程序如下图所示,模拟角度传感器接A3口读取的数值我们通过映射函数将其映射为0-125之间,对其定义区间休息(0-40),景观(40-80),加速(80以上),与之对应在主程序中,我们定义了加速模式、景观模式、休息模式三个函数以及感知植物生长的感知函数。感知生长函数,我们使用了哈士奇的物体追踪功能,先完成对植物的学习,而当植物生长叶片其宽度和高度超过我们设定的值时,屏幕出现“grow yes”提示,同时拍照记录植物生长过程。 5.设备组装 第一步:激光切割框架和窗体。 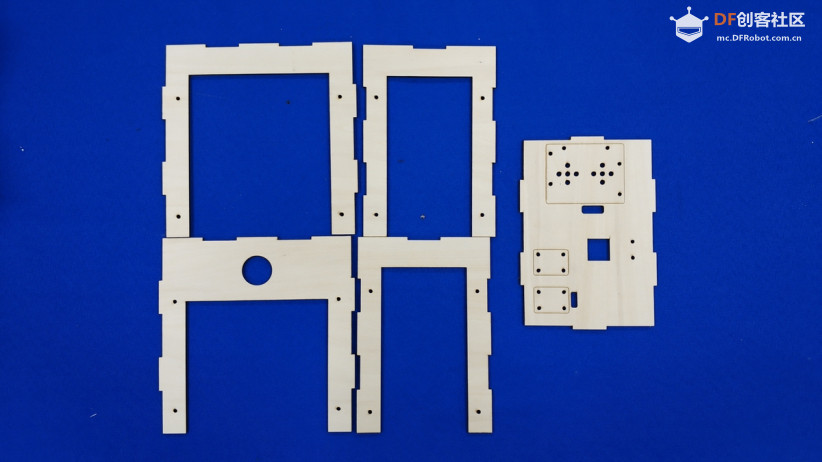 第二步:拿出顶板,在主控、二哈、传感器位置上固定铜柱。 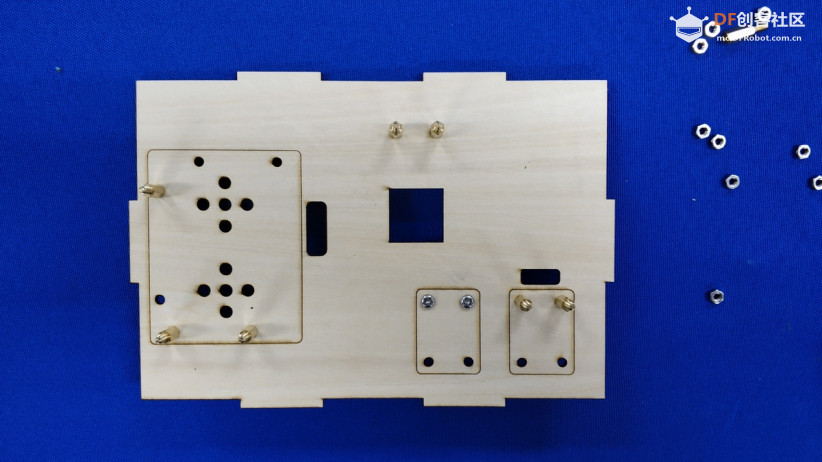 第三步:在顶板的背面粘贴灯带,如图18所示。 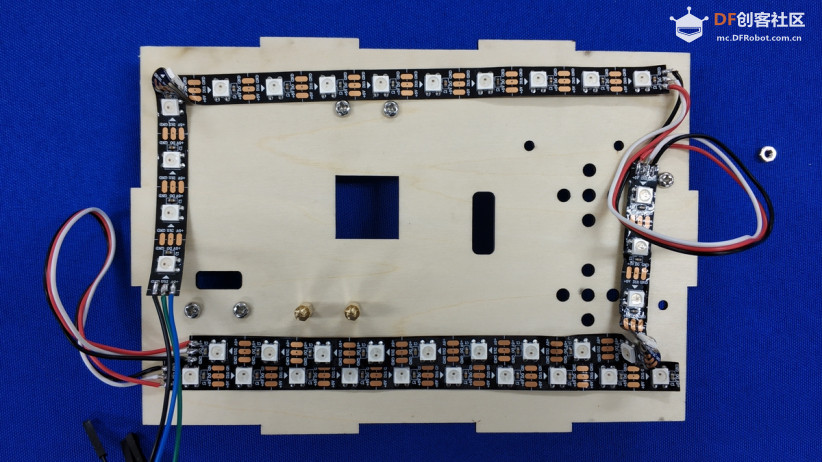 第四步:拿出温湿度传感器DH11安装在对应的铜柱上,如图19所示。 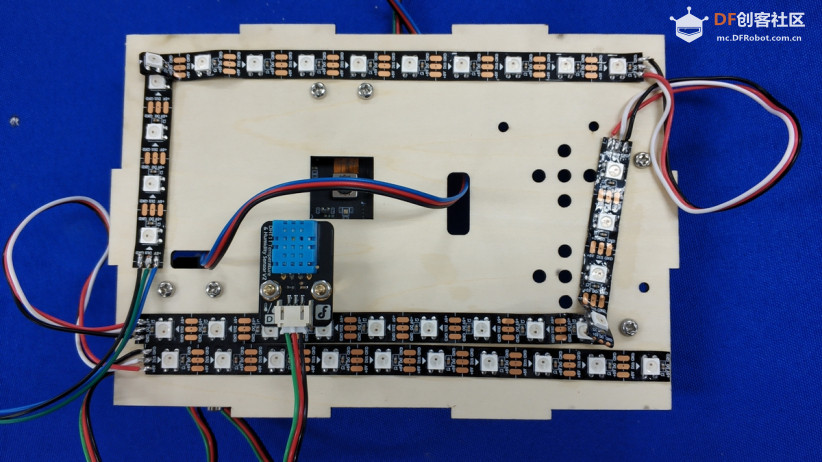 第五步:在顶板上安装Arduino Uno、二哈及模拟角度传感器,如图20所示,注意安装主控部分时,先将主控板与对应的支撑铜柱对齐,用螺母固定后,再叠加拓展板。 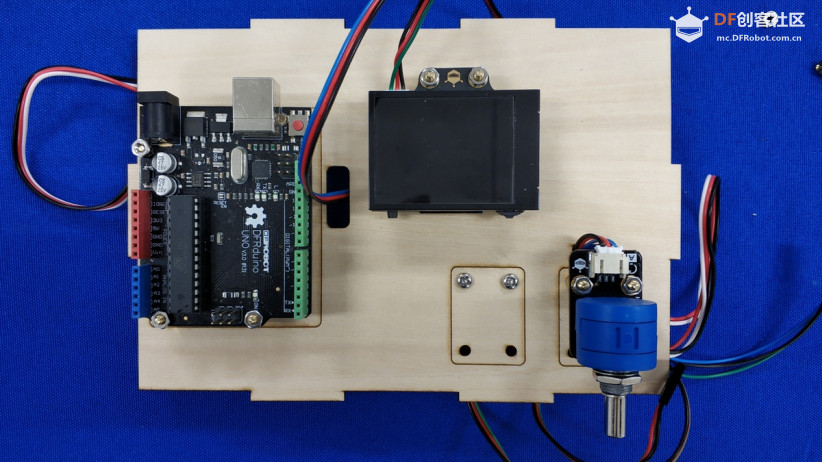 第六步:拿出窗体与框架结构,按照对应的孔位用螺丝固定,如下图21所示。 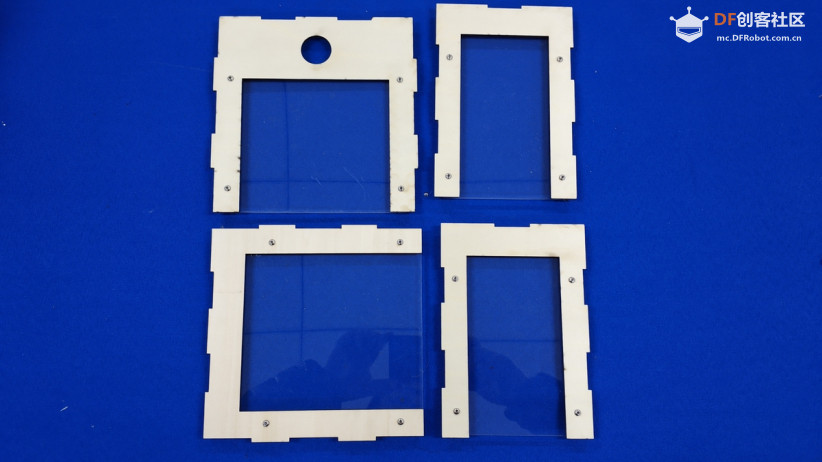 第七步:拿出蠕动泵,按如图22方式安装,注意将硅胶管,放置在内部。 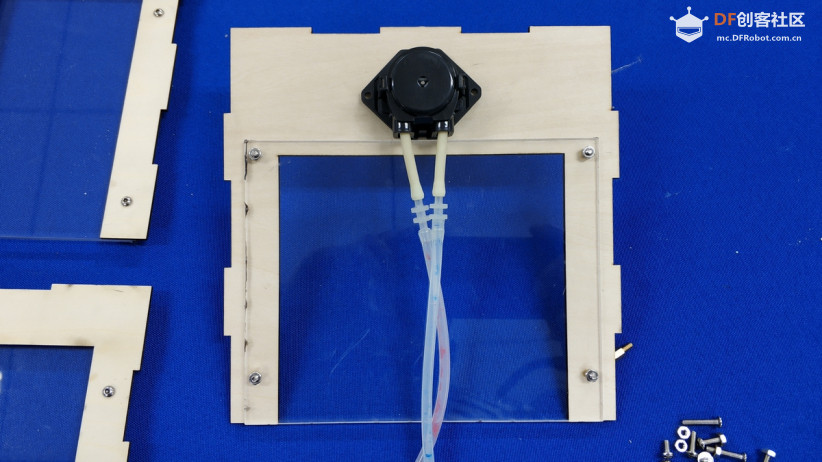 第八步:将前后左右顶五片结构件进行组装,如图23所示。 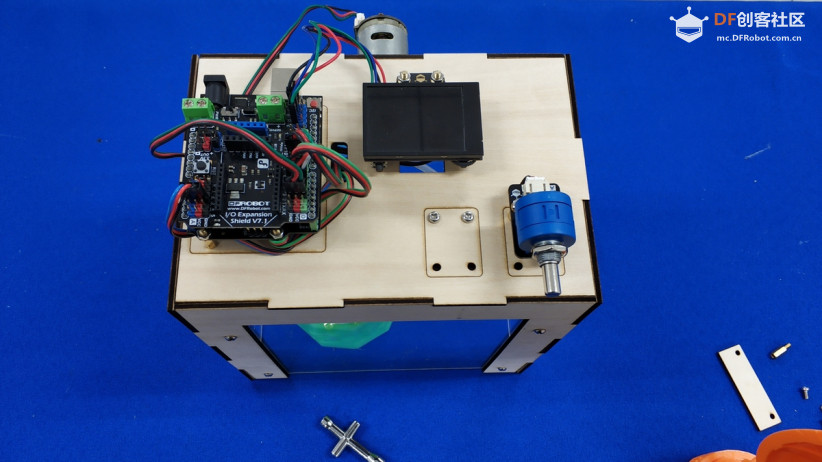 第九步:本次使用的风扇模块本身无法合理的固定在顶板上。因此,我们使用激光切割加工出图24所示的三片木板,叠加后与风扇模块固定。再将此部分与顶板内部用502胶水粘贴,从而完成风扇模块的安装。  6.系统测试 (1)系统加电对其进行测试,通过旋转模拟角度传感器,分别测试对应的加速模式mode:acce(如图25)、景观模式mode:land(如图26)、休息模式mode:rest(如图27)。 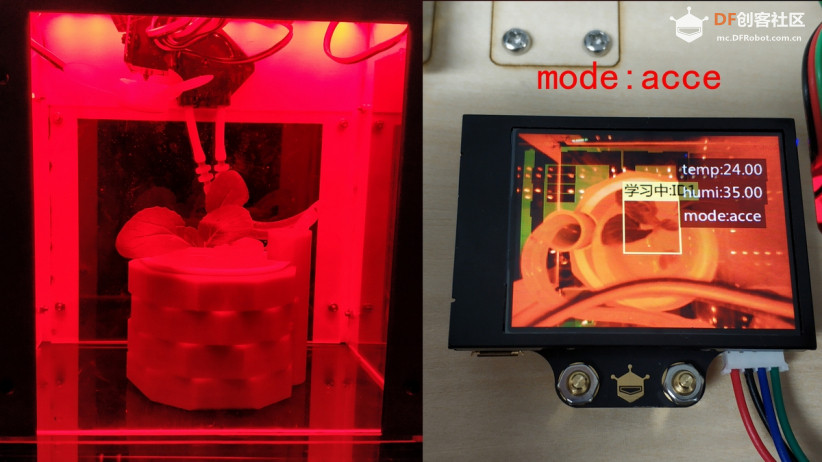 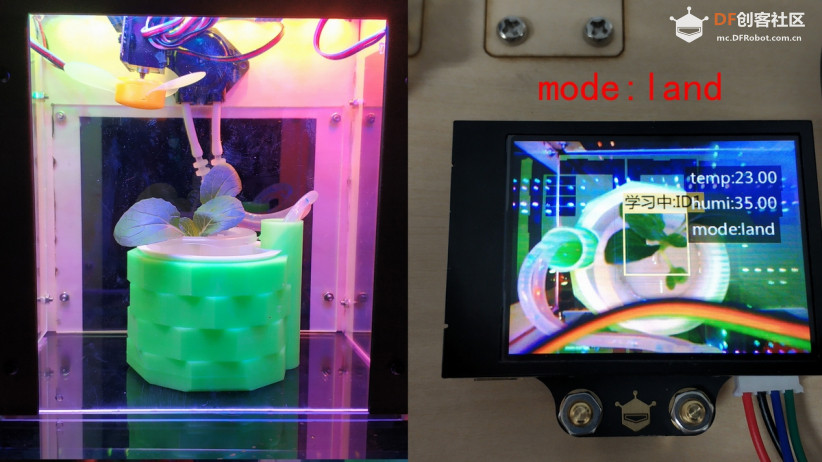 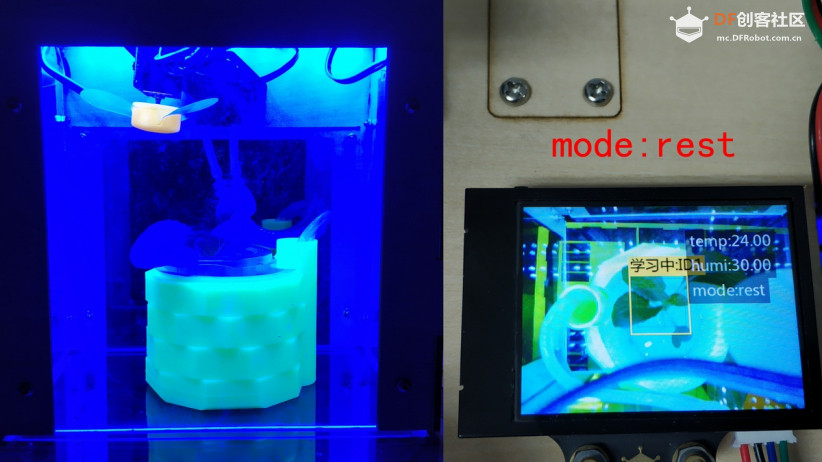 (2)感知生长:当植物叶片长大其宽度或高度超过我们设定的值时,会触发哈士奇拍照,并在哈士奇屏幕上出现提示信息。如图28所示。  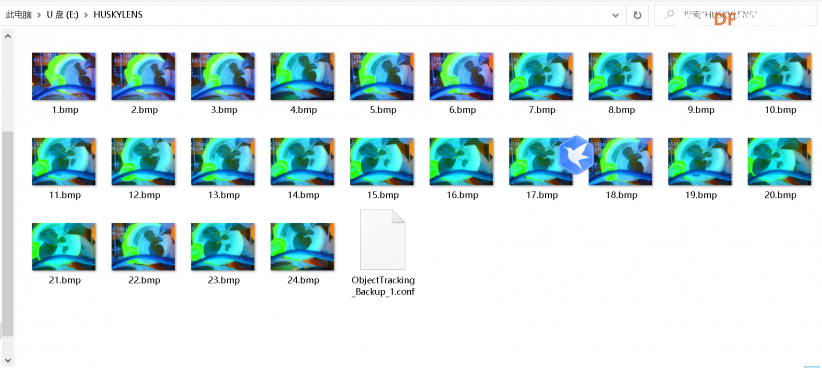 7.改进与提升 本次制作过程中,风扇的安装设计的比较粗糙,后续有待改进。另外作品内部的走线,虽然在安装时,尽量在铜柱上绕线,避免缠绕,但是在实施过程中还是出现了缠绕的情况。对于功能上,后续可以增加物联网的功能。 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed


 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶

 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 版主限定
版主限定
 牛X认证
牛X认证
 创作达人
创作达人
 小蘑菇
小蘑菇
 蘑菇人
蘑菇人
 蘑菇老人
蘑菇老人
 荣誉教师
荣誉教师
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 ARD DAY
ARD DAY
 编辑选择奖
编辑选择奖
 创客造
创客造
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖






