|
21470| 5
|
[求助问答] Mind+编程的小车红外控制与超声波自动避障不能同时启用 |
|
用Mind+编程的Arduino小车,能够实现红外控制,也能够实现超声波自动避障, 问题:当启动超声波自动避障模式后,就不能再接收红外控制信号(用串口监控显示看了,接收不到红外信号),请教,红外控制和超声波自动避障能不能同时使用? 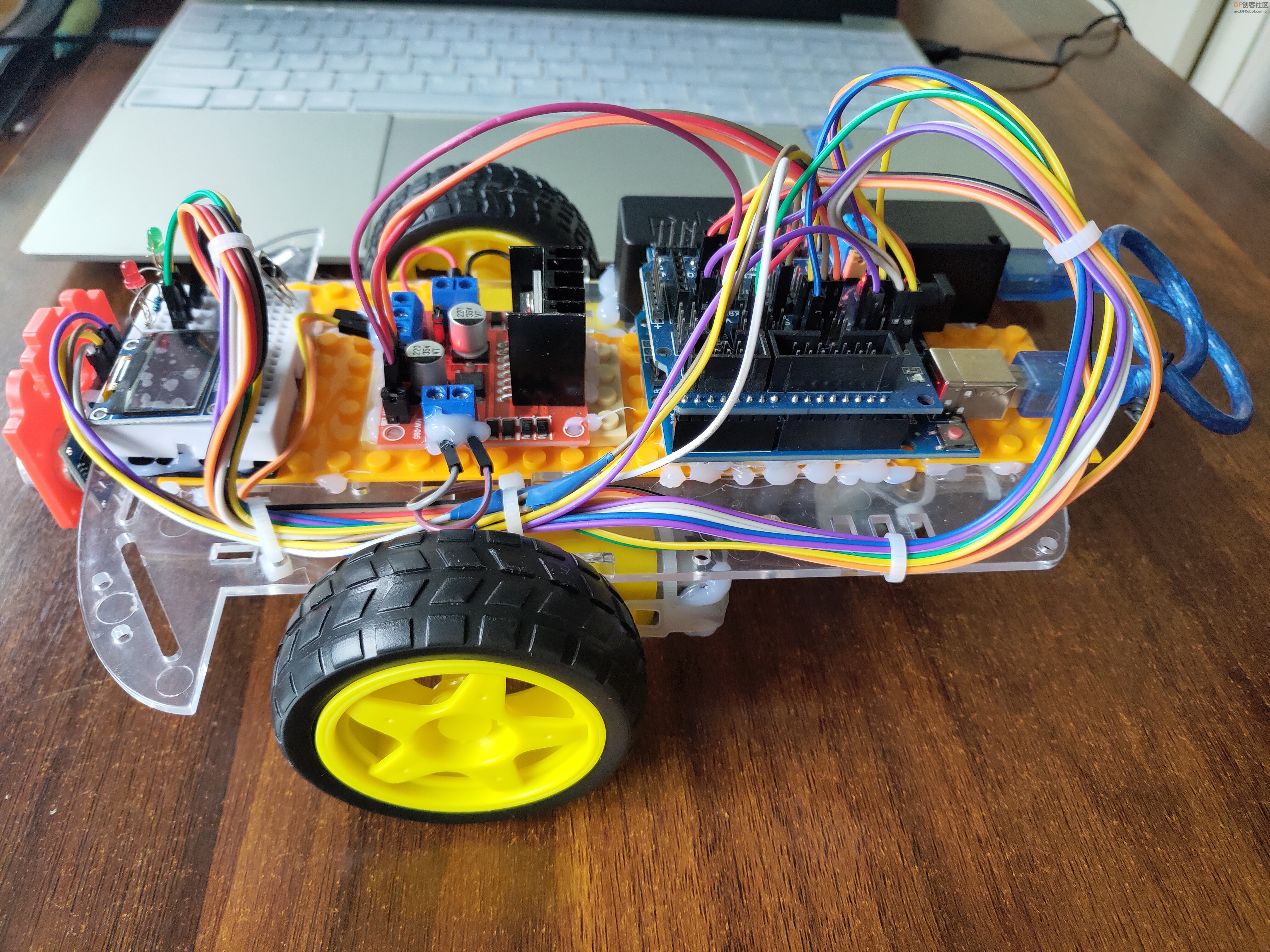 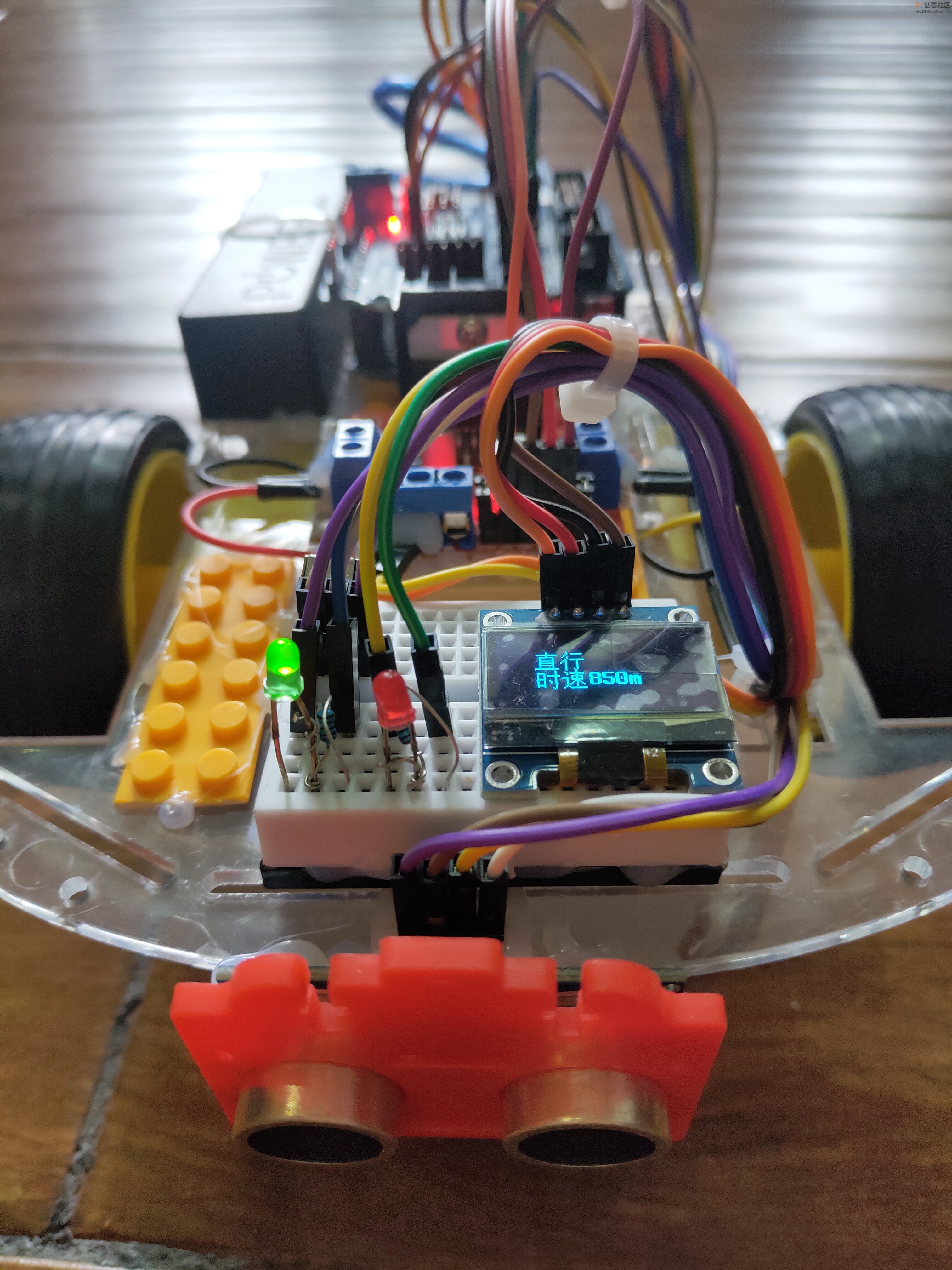 主程序: 主循环执行是红外遥控前进后退等操作,按下0键后,进入次循环执行,即超声波自动避障程序。 问题是,超声波自动避障启动后,就再也收不到红外信号了,车子只能向前,遇障碍停下,不受红外控制。  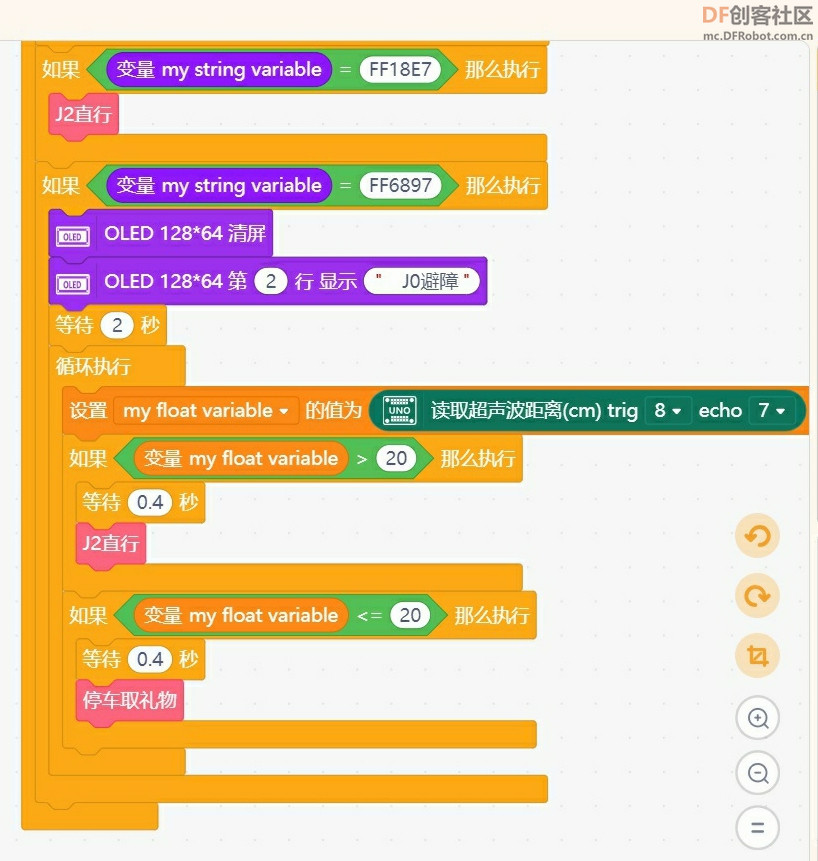 遥控器的2是前进、5是停止、8是后退、4是左转、6是右转,0是切换到超声波避障模式,以上按键均采用自定义函数方式,将按键与车轮、指示灯和显示屏状态显示进行了联动。 函数如下: 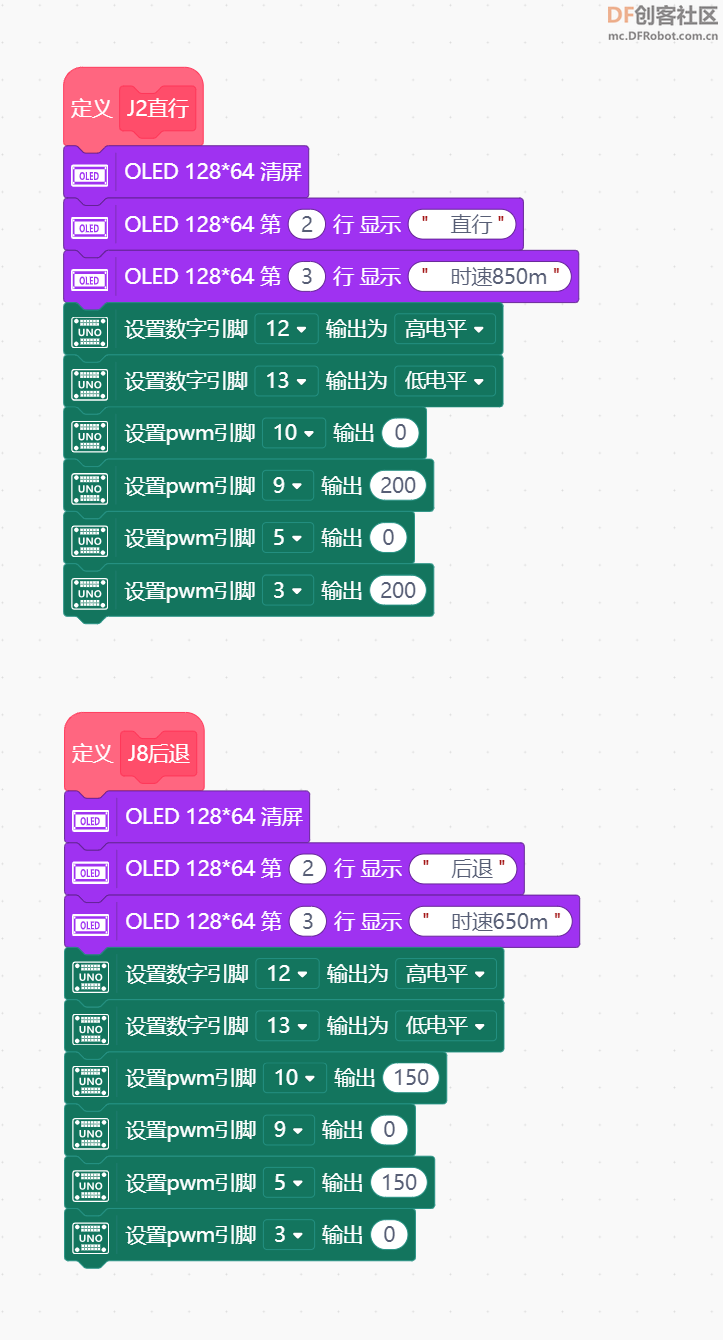 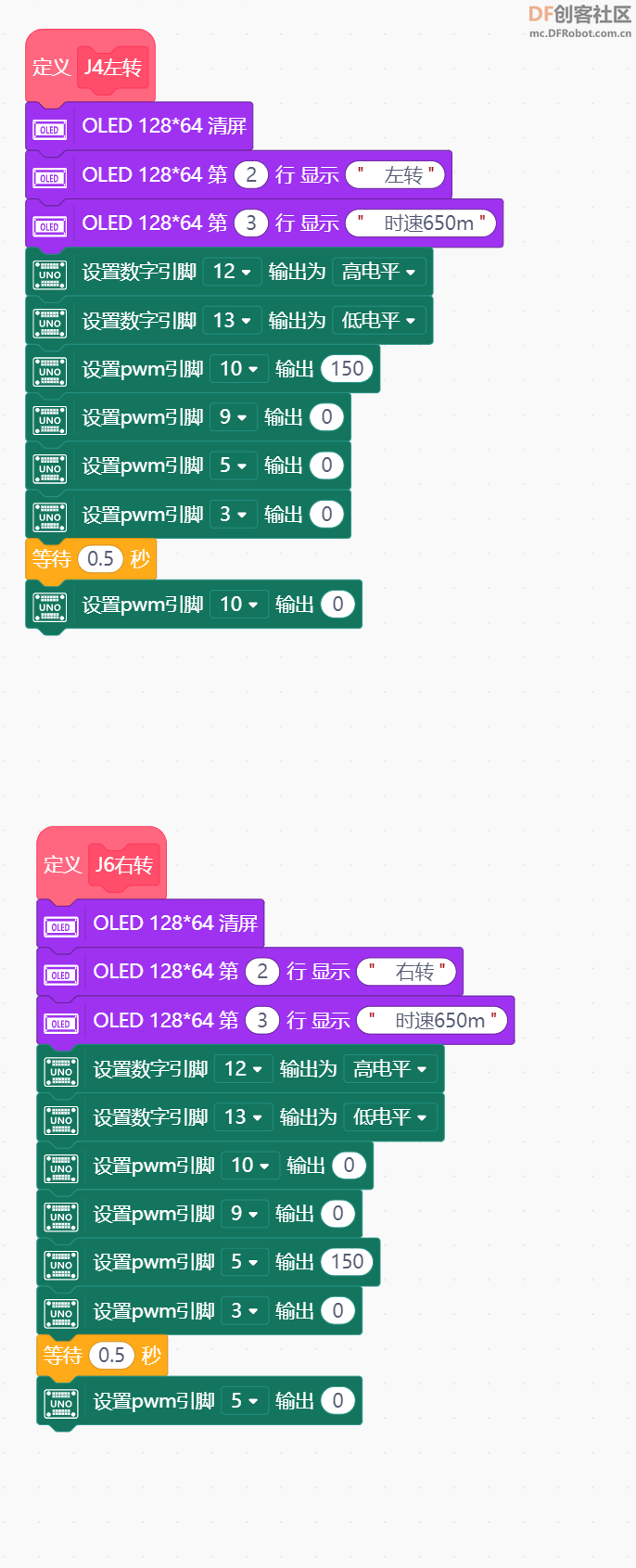 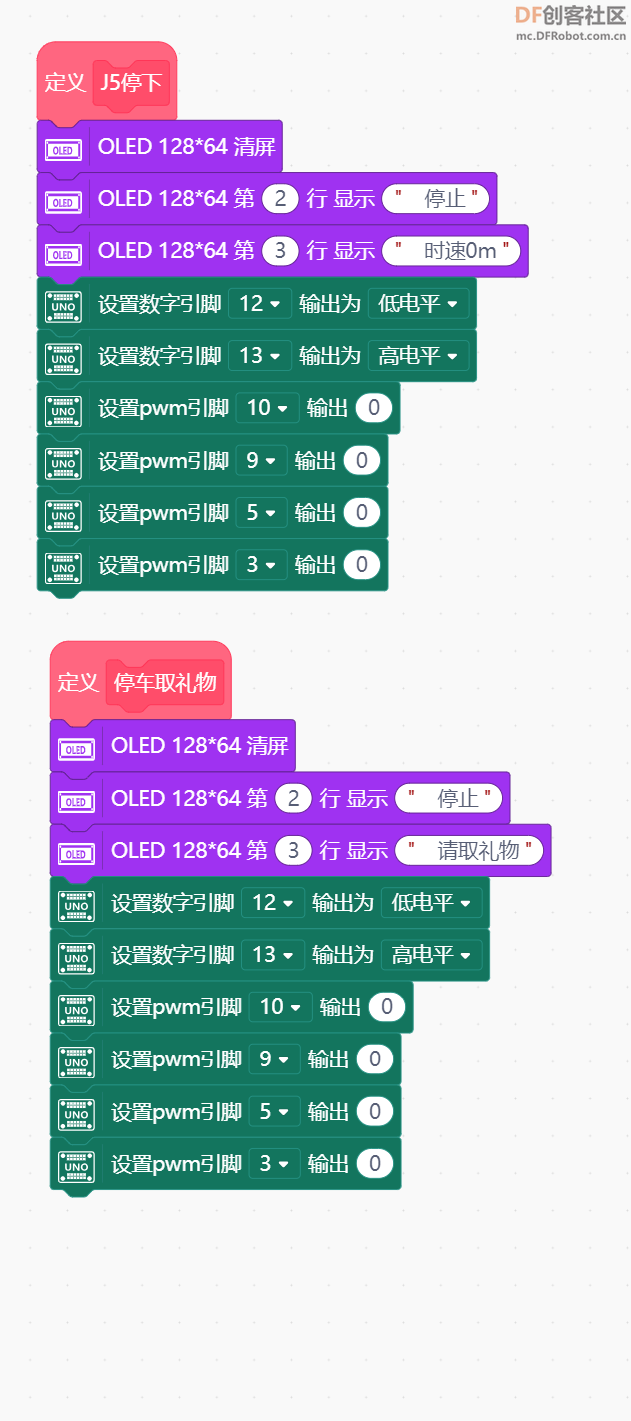 问题是,不启动0键,遥控器可以正常控制,轮子、指示灯和液晶显示屏状态显示的联动都正确。 启动0键后,遥控器就不能控制,车子就一直向前,遇到障碍物自动停下后,遥控器也没用,这时通过串口监视窗口,发现Arduino没有接收到红外信号。 我希望实现的功能是,启动0键后,车子进入避障模式,同时,我可以用遥控器操作车子后退、左右转等。 请教大神,怎么弄? |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶






