|
10482| 1
|
[项目] 分享Arduino驱动的机械臂,附带3D打印模型,软件控制方案 |
本帖最后由 IsoFace爱招飞 于 2022-8-19 15:40 编辑 控制重点
运行展示查看运行的效果 https://www.ixigua.com/iframe/7133447547426701831 使用控制设备
使用工业通讯协定Modbus TCP,可换用 Modbus RTU、OPC UA、MQTT、RestAPI、WebSocket。 使用开发软体Smart物联网的精灵。软件控制的设计方案是出自于此。 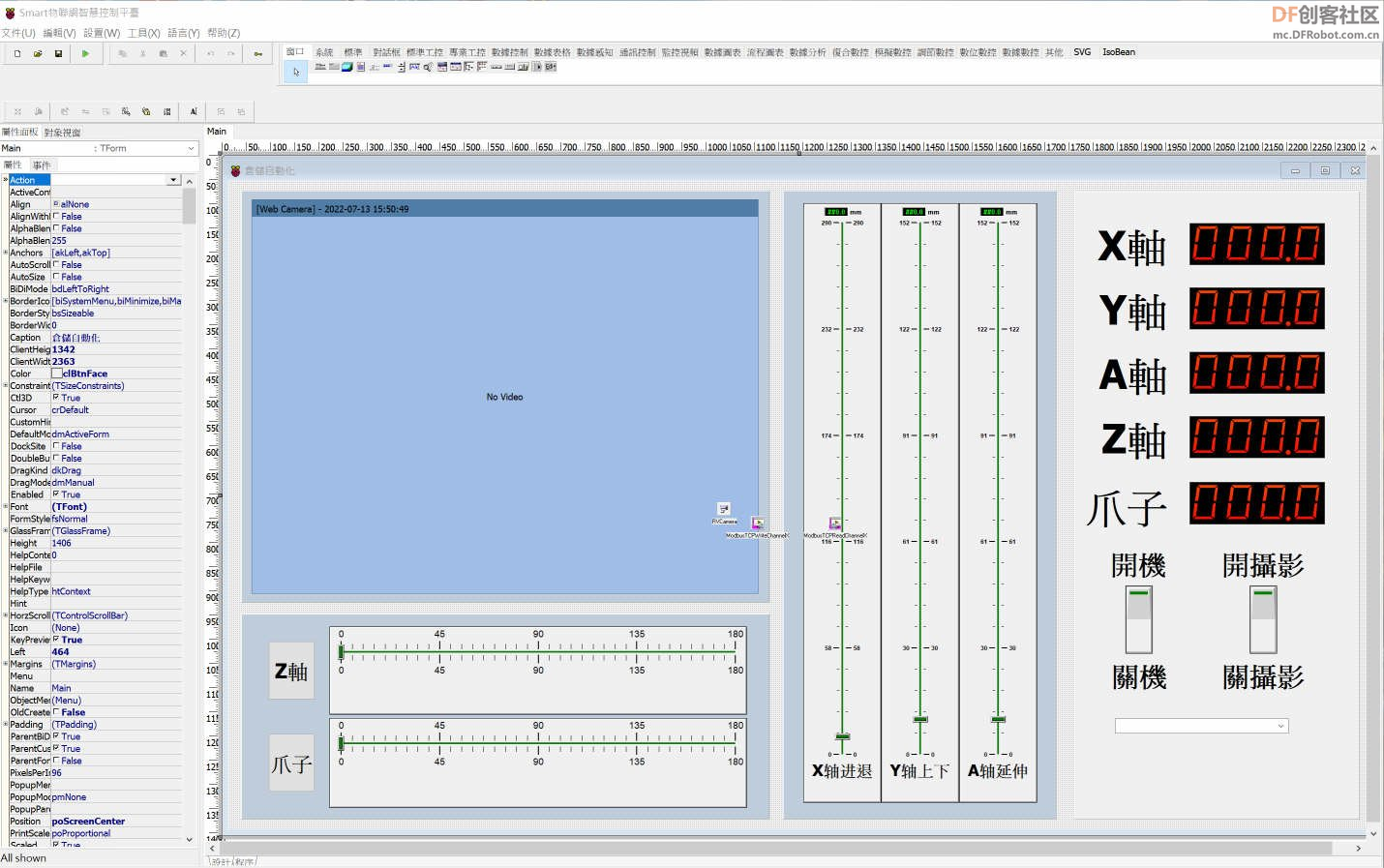 零件连线基本的零件连线示意图如下。由于一块CNC Shield 最多支持三块A4988的独立驱动,故此处使用两块板来实现相应的功能。舵机用于控制爪子的开合,其余的步进马达分别控制四轴方向上的运动。 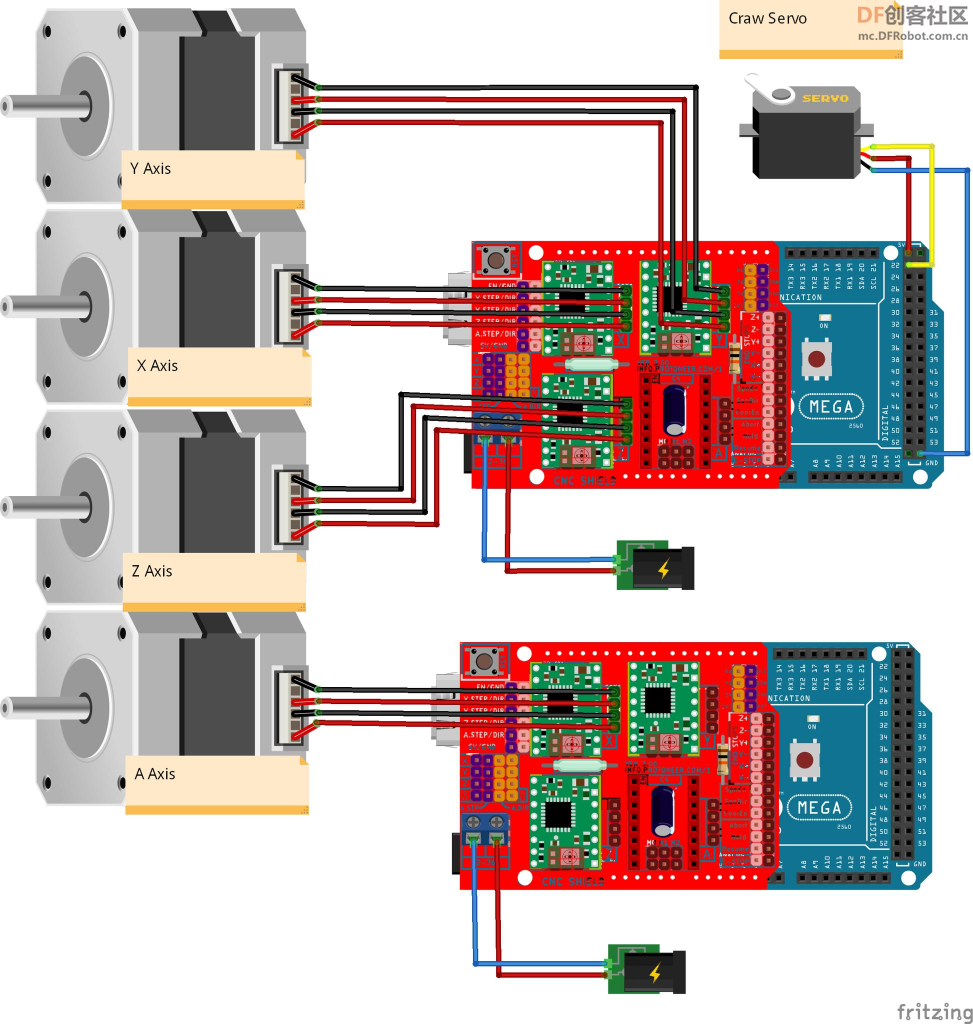 外壳打印使用3D打印制作外壳的材料。所需的素材文件会在下方的链接中提供。外壳打印完成后进行组装。 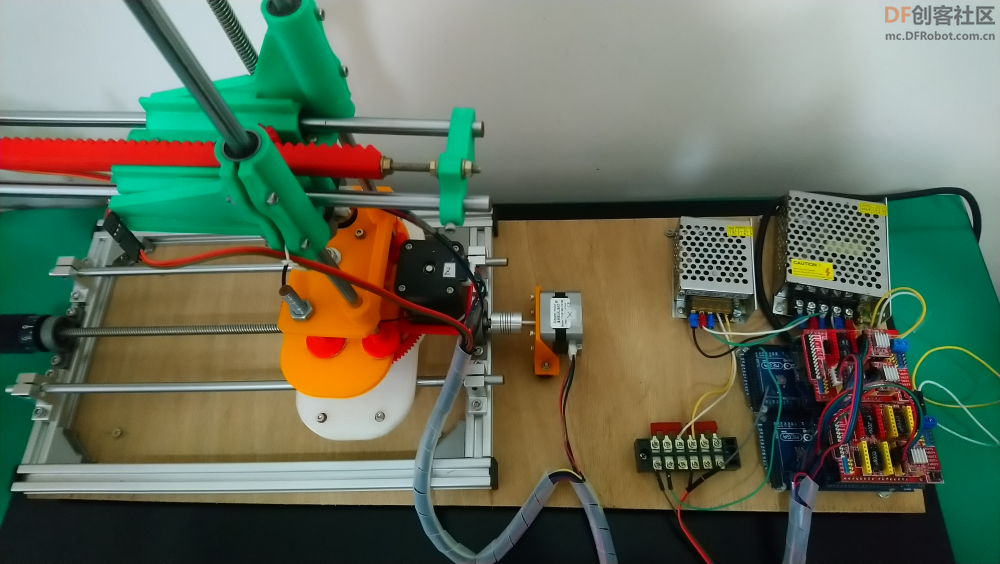  参考资料上述提到所需的相关文件已放在Gitee: 其中有包含一个后缀名为 |
| 欢迎大家学习交流,如果有哪里不明白的地方或者有什么意见建议,可以在下方留言,我看到了会尽量回复。 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶






