|
7505| 3
|
[M10教程] 志童道合 | 做一个用行空板遥控的掌控小车车 |
|
本帖最后由 rzyzzxw 于 2022-11-27 15:30 编辑 童年很宝贵,但童年的快乐并不贵。   很喜欢小林,寥寥几笔就绘出了童年的快乐。 童年生活在物质匮乏年代的农村,所玩的东西大多是房前屋后田间地头就地取材的东西。 泥巴就是经常玩的。 用泥巴可以塑造出自己梦想的东西,比如,小动物、小房子……还有小车车。 那时可以弯腰看雨后公路上汽车过后滴下的油渍,氤氲着散开反射着崎岖样的彩虹,就边汽车的尾气也有一点汽油的特殊香味。 有时用泥巴做了小车车,湿的时候容易散架,放干了轮子却是不圆。 再后来,家里有了小朋友,玩玩车车是少不了的,特别是玩了创客后,自己也能做车车。 有时想起来,陪孩子们玩创客,教的是小朋友,致敬的是自己的童年。 【目标任务】 1、用乐动掌控+电机+乐高积木搭一个小车车,编写遥控接收端程序,收到消息执行相应动作。 2、用行空板的板载热点连接掌控板,用SIOT发送消息控制掌控小车车的运动。  【器材清单】 行空板 1 乐动掌控 1 乐动电机 2 乐高积木 若干 【软件】 行空编程 mind+ 0.7.2 掌控编程 mPython 0.7.6 STEP 1 (1) 检查SIoT是否开启 长按行空板的“Home”键进入菜单页,点击“应用开关”,检查SIoT服务是否开启,如果显示“已禁用”,点击SIoT选项,切换SIoT状态为“已启用”。 具体操作如图所示: (2) MQTT-py库 要向SIoT平台发送数据,要有发送相关指令才能实现。但是现在行空板的指令区中没有这样的指令,该怎么办呢? 点击“拓展”,在官方库中找到“MQTT-py”并点击,完成添加。 (3) MQTT初始化 指令添加完成后,要使用MQTT构建物联网,首先需要使用指令 初始化MQTT,点击“设置”图标,将“SIoT服务器”的内容修改为行空板连接电脑的默认IP地址“10.1.2.3”。 【学习感悟:SIOT内置在行空板系统中,(1)中开启后就开始运行了,所以SIoT服务器就是行空板连接电脑的默认IP地址“10.1.2.3”。无论下面的案例中行空板用路由WIFI还是板载热点模式和掌控板组网物联,这里的设置都是一样的。所以行空板就是一个成熟的物联网数据中心了。】 初始化设置完成后,MQTT发起连接,使用指令MQTT发起连接;连接成功后,需要保持连接,使用指令 MQTT保持连接永久。 要向SIoT平台发送数据,就需要先订阅要发送到SIoT平台的主题,使用指令 MQTT订阅 。需要特别说明的是,MQTT订阅指令中填写的主题,并且固定的格式为“项目ID/设备号”。 (4) 行空板向SIoT物联网平台发送数据 完成了“MQTT的初始化——发起连接——保持连接——订阅”这四个步骤后,接下来,就可以向SIoT平台发送数据了,使用 MQTT发布 指令。 (5) 启用行空板热点 行空板开启热点,默认IP为193.168.123.1。 STEP 2 编写行空板程序 第一个版本的程序是这样的: 用上下左右中五个按钮来发送消息,控制掌控小车运动。 这里用了2个主题,五条路分别传输五个按钮的消息,这样可以防止一路消息的排队和拥堵。实践证明,这样做的效果还是不错的。 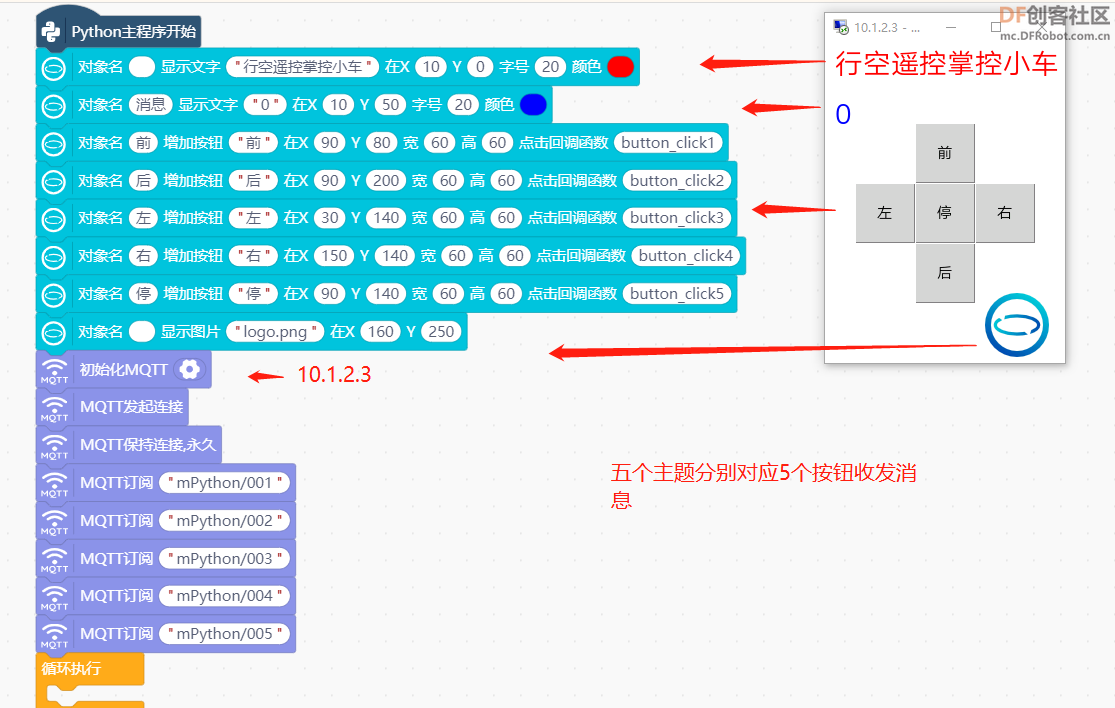  行空板可以显示接收到的消息,所以现在不用掌控板接收也可以自行测试行空发送端。 STEP 3 掌控板小车编程 【提示】使用时要先开启行空板载热点。先开行空板,后开掌控板,掌控板方可通过热点与行空连接。 运行mPython0.7.6 设置---高级设置---更换主控---乐动掌控(如果用百灵鸽或者掌控宝做小车选择掌控板,程序相似。) 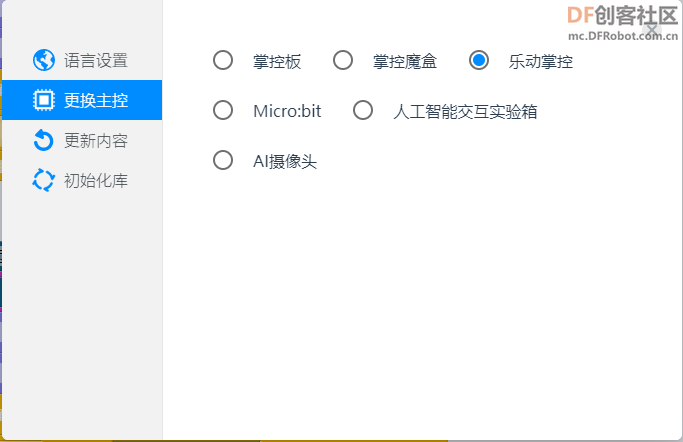 添加---执行器---电机,将左轮电机接入M1接口,右轮电机接 M2接口。  编写程序与调试 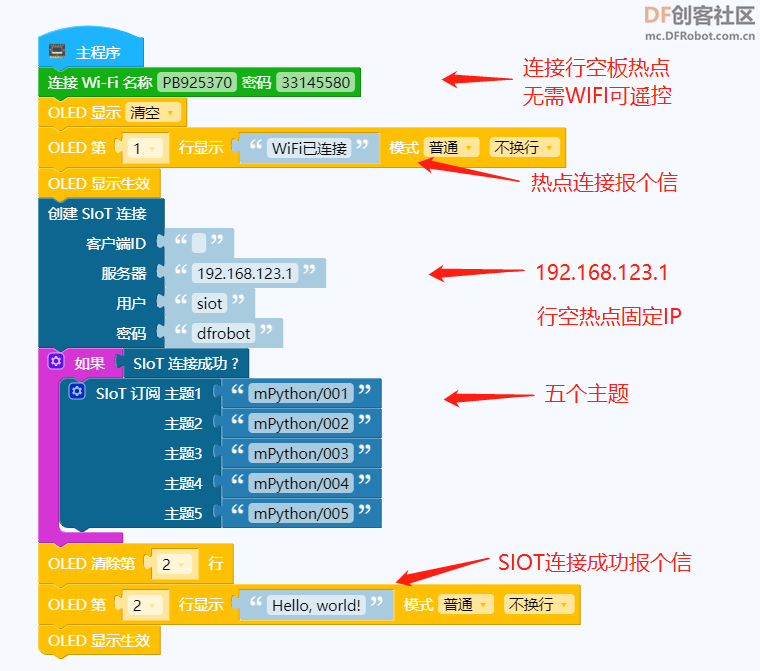    STEP 4 “摇杆”控制的遥控器按钮能控制小车了,可是感觉不操作不够丝滑,想改成类似摇杆式的,于是开始尝试,经过一番尝试,完成了如下的程序。 【视频中一手拍摄一手操作,看起来也一般,其实比按钮式爽多了。水平有限,抛砖引玉】 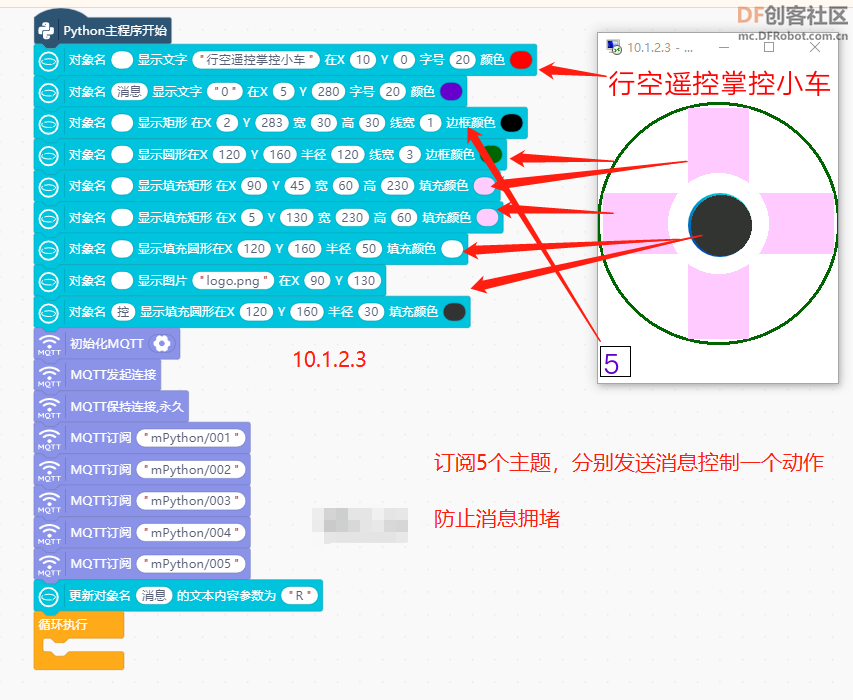  【任务小结:经过迭代之后,达到了预定目标,技术所限,但是还有很大不足。期待大家改进。】 程序附后:  行空遥控掌控小车.rar 行空遥控掌控小车.rar |
 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶


 活跃会员
活跃会员
 宣传大使
宣传大使
 版主限定
版主限定
 牛X认证
牛X认证
 老版主限定
老版主限定
 创作达人
创作达人
 小蘑菇
小蘑菇
 蘑菇人
蘑菇人
 蘑菇老人
蘑菇老人
 荣誉教师
荣誉教师
 编辑选择奖
编辑选择奖
 物联网挑战
物联网挑战
 编辑选择奖
编辑选择奖
 ARD DAY
ARD DAY
 编辑选择奖
编辑选择奖
 创客造
创客造
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖









