|
FireBeetle 2 ESP32-C6打靶器开发文档(增强版:含光线传感器与LED) 一、概述 本开发文档详细介绍了如何使用FireBeetle 2 ESP32-C6开发板,结合舵机、光线传感器和LED,制作一个具有红外线接收和亮灯提醒功能的打靶器。该打靶器不仅具备远程控制功能,还能通过光线传感器检测红外线信号,并通过LED进行亮灯提醒,增强了交互性和趣味性。 二、硬件准备 - FireBeetle 2 ESP32-C6开发板
- 舵机
- 光线传感器(用于接收红外线)
- LED及限流电阻
- 杜邦线
- 供电设备(Type-C线、5V DC电源、太阳能电池板)
- 其他必要的连接器和固定件
三、软件准备 - Arduino IDE(确保已安装ESP32支持)
- 舵机控制库(如Servo库)
- 光线传感器库(根据具体型号选择合适的库)

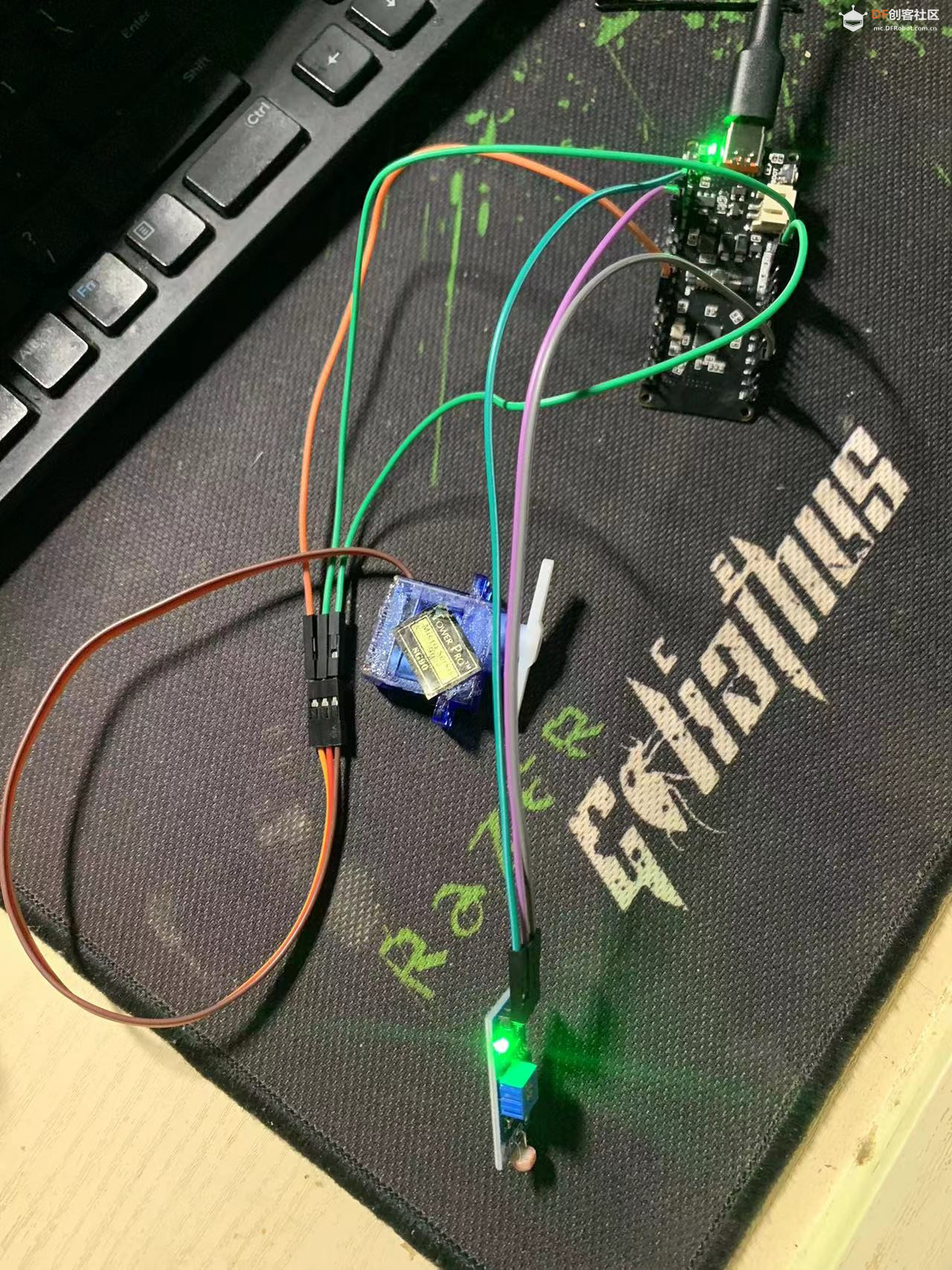
四、硬件连接 - 将舵机的信号线连接到ESP32-C6的GPIO引脚(例如GPIO 9)。
- 将舵机的电源线连接到ESP32-C6的5V电源引脚。
- 将光线传感器的信号线连接到ESP32-C6的另一个GPIO引脚(例如GPIO 6),并将电源线连接到5V电源引脚。
- 将LED的正极通过限流电阻连接到ESP32-C6的另一个GPIO引脚(例如GPIO 15),并将负极连接到GND引脚。
- 使用杜邦线将ESP32-C6的TX和RX引脚连接到电脑的串口,以便进行调试和上传程序。
- 选择合适的供电方式,将Type-C线、5V DC电源或太阳能电池板连接到ESP32-C6的供电接口。
五、软件编写 - 打开Arduino IDE,并加载ESP32开发板支持。
- 创建一个新的Arduino项目,并选择ESP32-C6作为目标板。
- 安装并包含舵机控制库、光线传感器库以及LED控制代码。
- 在代码中初始化舵机对象、光线传感器对象和LED对象,并设置相应的控制引脚。
- 编写逻辑控制代码,当光线传感器检测到红外线信号时,触发舵机动作和LED亮灯提醒。
- 使用ESP32-C6的Wi-Fi或蓝牙功能接收远程控制指令,结合光线传感器的输入来控制舵机的动作。
六、调试与测试 - 上传程序到ESP32-C6开发板。
- 通过串口监视器或其他调试工具检查程序的输出和状态。
- 使用红外线发射器发送信号,观察光线传感器是否能够正确接收并触发舵机动作和LED亮灯。
- 使用其他设备通过控制指令,结合红外线信号测试整个系统的功能。
- 根据测试结果调整和优化程序逻辑。
-
- /*!
- * MindPlus
- * uno
- *
- */
- //#include <ESP32Servo.h>
- // Servo myServo; // 创建一个 Servo 对象来控制舵机
- int led = 15;
- int lled = 6;
-
- // 主程序开始
- void setup() {
- pinMode(led,OUTPUT);
- pinMode(lled,INPUT); // 将舵机连接到引脚 9
- }
- void loop() {
- if (digitalRead(lled)) {
- digitalWrite(led, HIGH);
- analogWrite(9, 200);
- delay(1000);
- }
- else {
- digitalWrite(led, LOW);
- analogWrite(9, 100);
- delay(1000);
- }
- }
七、注意事项 - 确保光线传感器的型号与所选库兼容,并根据传感器数据手册正确连接和配置。
- 在使用LED时,注意选择合适的限流电阻,以避免LED过流损坏。
- 在编写程序时,注意处理光线传感器可能产生的噪声信号,确保系统的稳定性和准确性。
- 根据实际应用场景,可以调整舵机的转动角度、速度和LED的亮度等参数,以达到最佳效果。
八、总结 本开发文档详细介绍了使用FireBeetle 2 ESP32-C6开发板结合舵机、光线传感器和LED制作打靶器的方法和步骤。通过合理的硬件连接和软件编写,我们实现了红外线接收、远程控制以及亮灯提醒的功能,为智能家居项目提供了更多的趣味性和交互性。在实际应用中,还可以根据需求进一步扩展系统的功能和性能。
| 


 沪公网安备31011502402448
沪公网安备31011502402448
 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶






