|
22484| 0
|
[ESP8266/ESP32] 基于掌控板的两轮巡线程序 |

|
1、项目目标: 结合ESP32掌控板作为主控,让小车完成巡线任务。 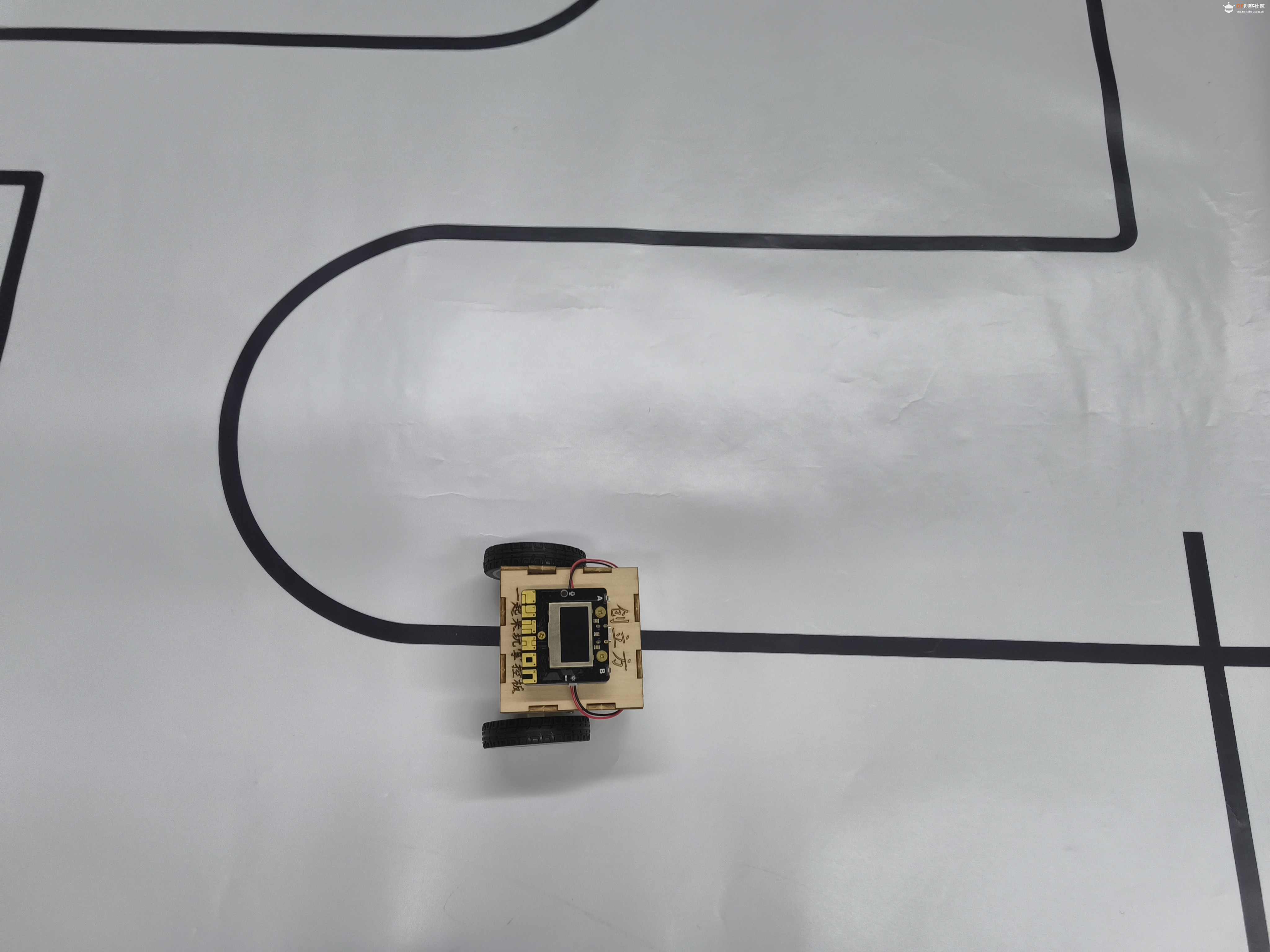 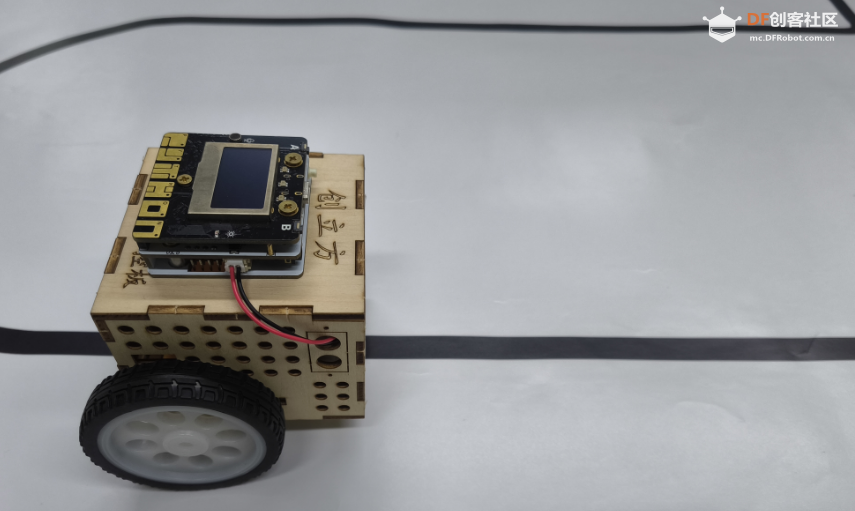 2、使用器材: 掌控板*1 百龄鸽拓展板 N+巡线传感器*1 轮子*2 电机*2 万向轮*1 激光切割板套件 3、所学知识点 (1)巡线传感器原理 概念:巡线传感器可用于巡线线检测,根据反射式光电传感器的原理,这种光电式巡线传感器可以不受光线的影响,并且可以巡不同颜色的线,识别不同颜色,获取的数值是不同的。红外原理的巡线传感器很容易受外界环境光的影响。巡线传感器根据探头多少?分为一路、二路和四路等等。越多探头,巡线时越精准。 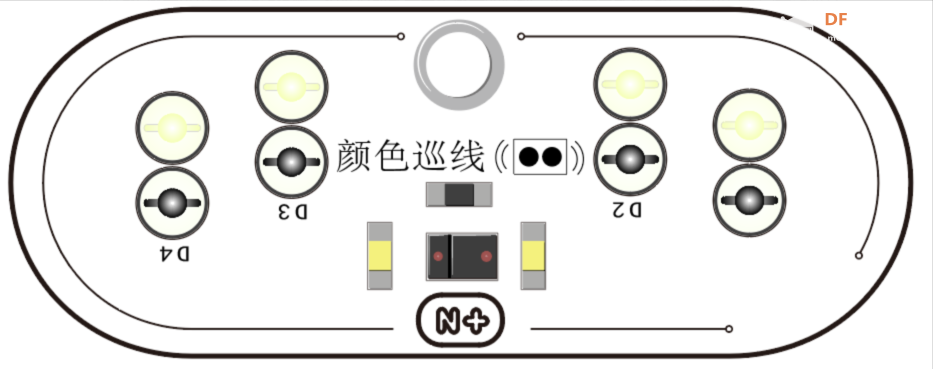 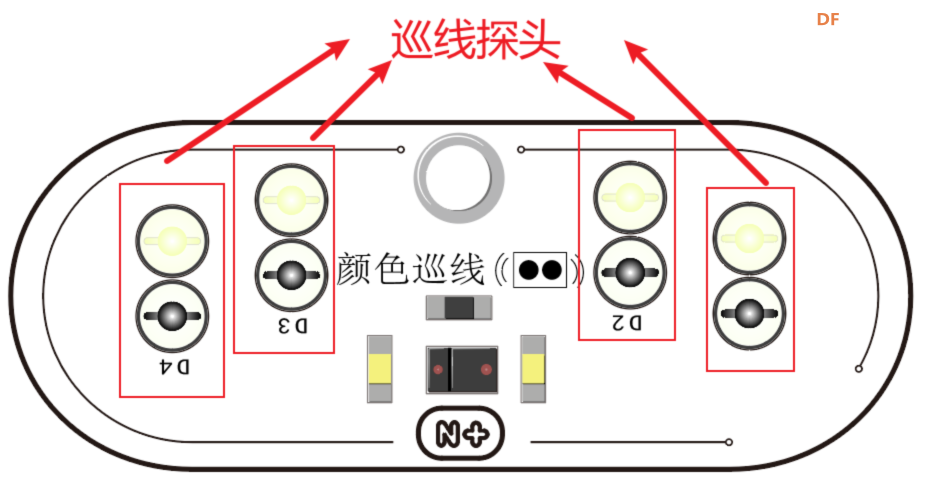 电路连接 巡线传感器接I2C接口。 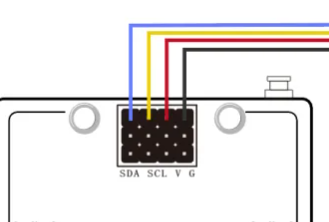  (2)白底黑线巡线程序,使用中间两个探头进行巡线,最边上的两个探头用于判断岔路口。 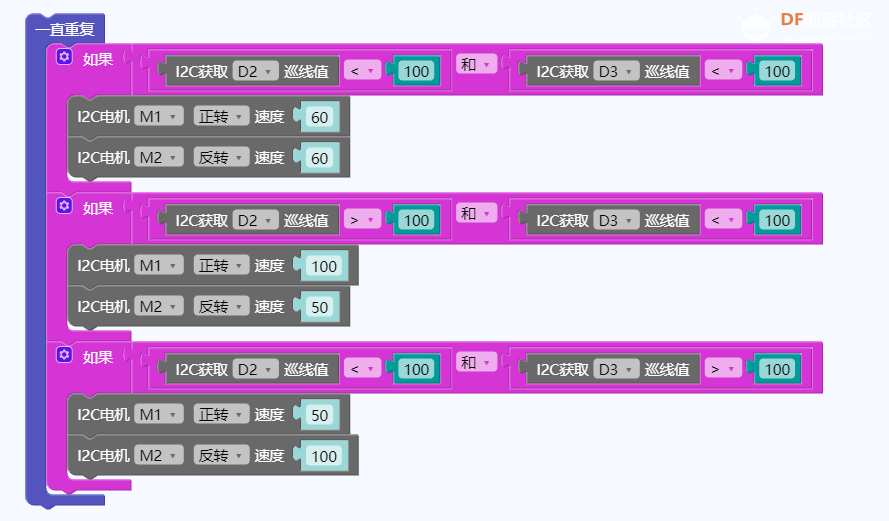 这个程序可以实习简单的环形、圆形巡线。 如果要实现更加复杂的巡线路线,比如十字分叉路口、T字分叉路口就要考虑到更多的环境因素。 比如实现t字形分叉 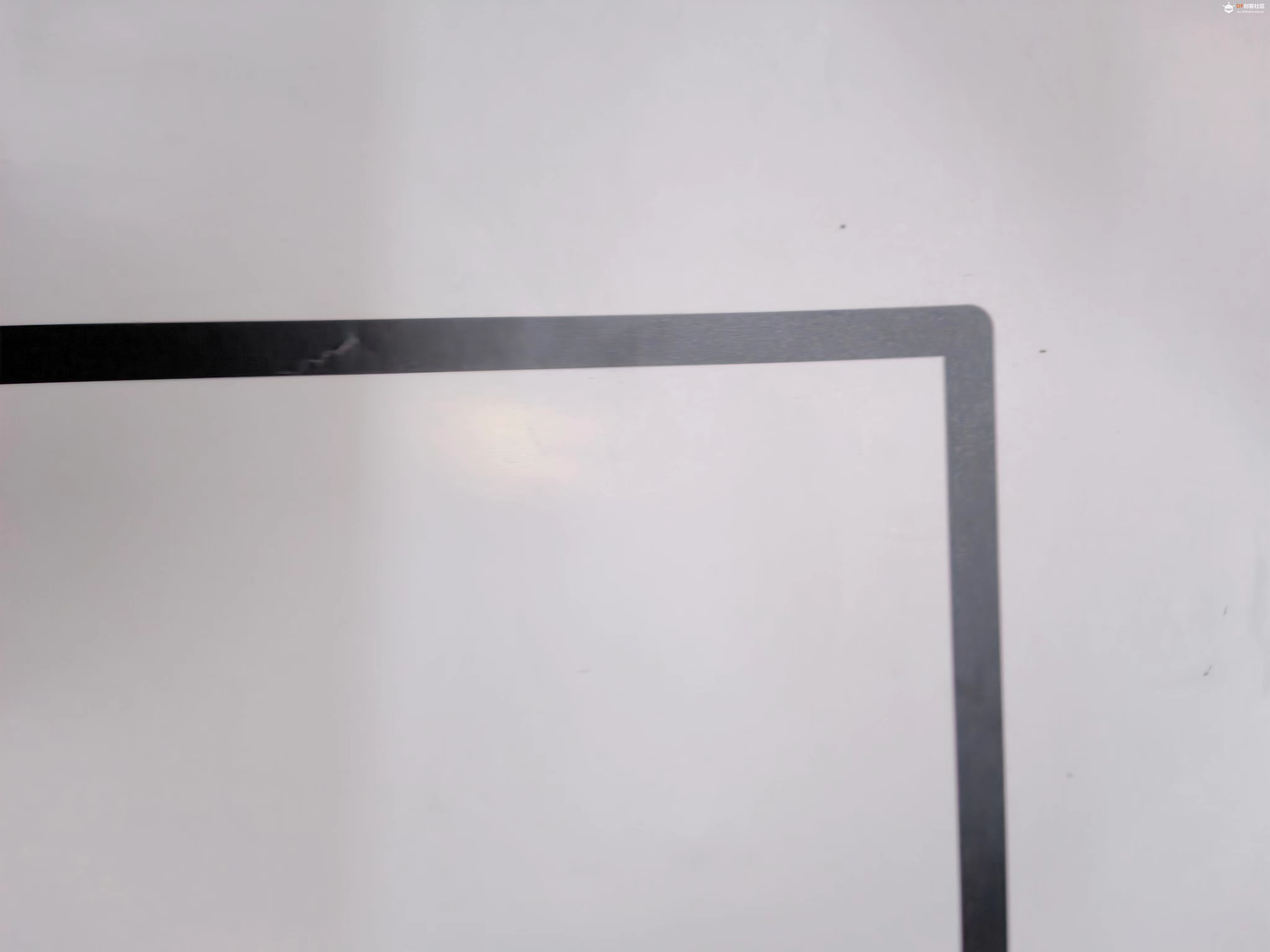 在进行数值测量获取的时候,发现D3和D4的巡线值大于100,而D2和D1巡线值小于100,所以得出  给一定时间让它转回到正确的线 如果要实现这种十字分叉 依然也要用巡线传感器测算当机器到达十字路口的数值 得出数值是D1 D2 D3 D4均大于100,因此得出以下程序  如果这次条件再设计的更复杂点,如果有三个分叉路口,前面两个分叉路口都是右转,最后一个分叉路口左转。 有一个很简便的设置变量方法,程序如下图 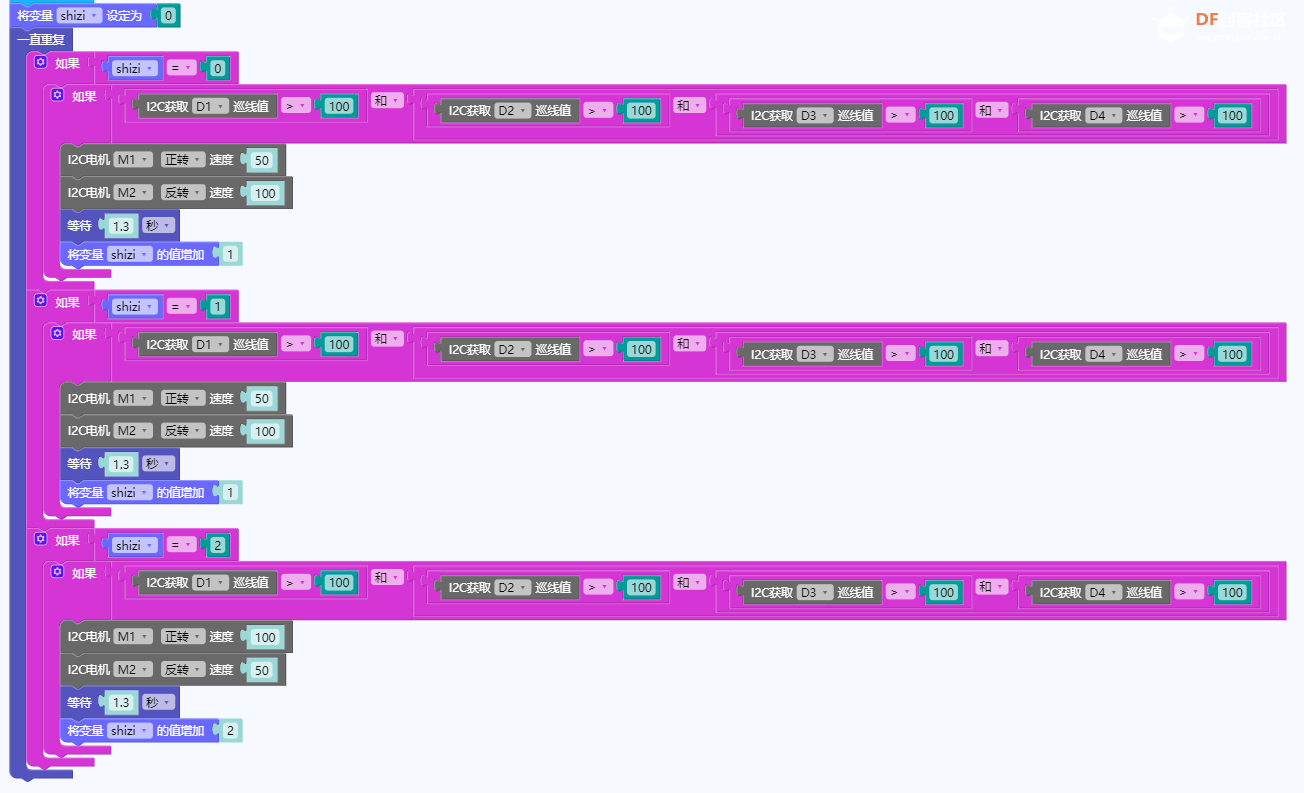 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶






