|
4548| 0
|
[M10教程] 【行空板扩展板】掌控板通过UDP控制的行空板小车 |
|
本帖最后由 glwz007 于 2024-9-30 16:13 编辑 用掌控板通过UDP控制的行空板小车 一、制作缘由 今年7月,DFrobot论坛发布了免费试用行空板双路电机驱动I/O扩展板的活动,第一时间报名,竟然幸运的获得了试用资格。 在此,向提供丰富活动的DFrobot论坛致以衷心的感谢! 收到扩展板后,第一时间研究这块板子,发现自带双路电机驱动是其亮点之一。于是就琢磨利用这块板子制作一个三轮小车,用两个电机驱动两个轮子,再加上一个万向轮作为小车底盘,然后可以用这个底盘完成常用的避障小车、巡线小车等功能。这次主要是完成小车的底盘,初步实现用掌控板遥控的功能。 二、材料清单 1.行空板1块; 2.行空板双路电机驱动I/O扩展板 1块; 3.掌控板1块; 4.百灵鸽扩展板1块; 5.TT马达2个; 6.18650电池2节及电池盒1个; 7.两块用亚克力激光切割的底盘; 8.65mm轮子两个,万向轮1个; 8.导线、螺丝、铜柱若干。 三、制作过程 1.将2个TT电机、万向轮和电池盒安装到底层亚克力板上。  2.通过铜柱,将上层亚克力板固定在底层亚克力板上,用于安装行空板扩展板和电池仓。 3.将电源线用行空板扩展板附带的DC2.1转接线端子头连接到行空板扩展板的DC2.1电源接口。 4.将两个TT电机的电源线穿过亚克力板,接到行空板扩展板的M1、M2电机接口。 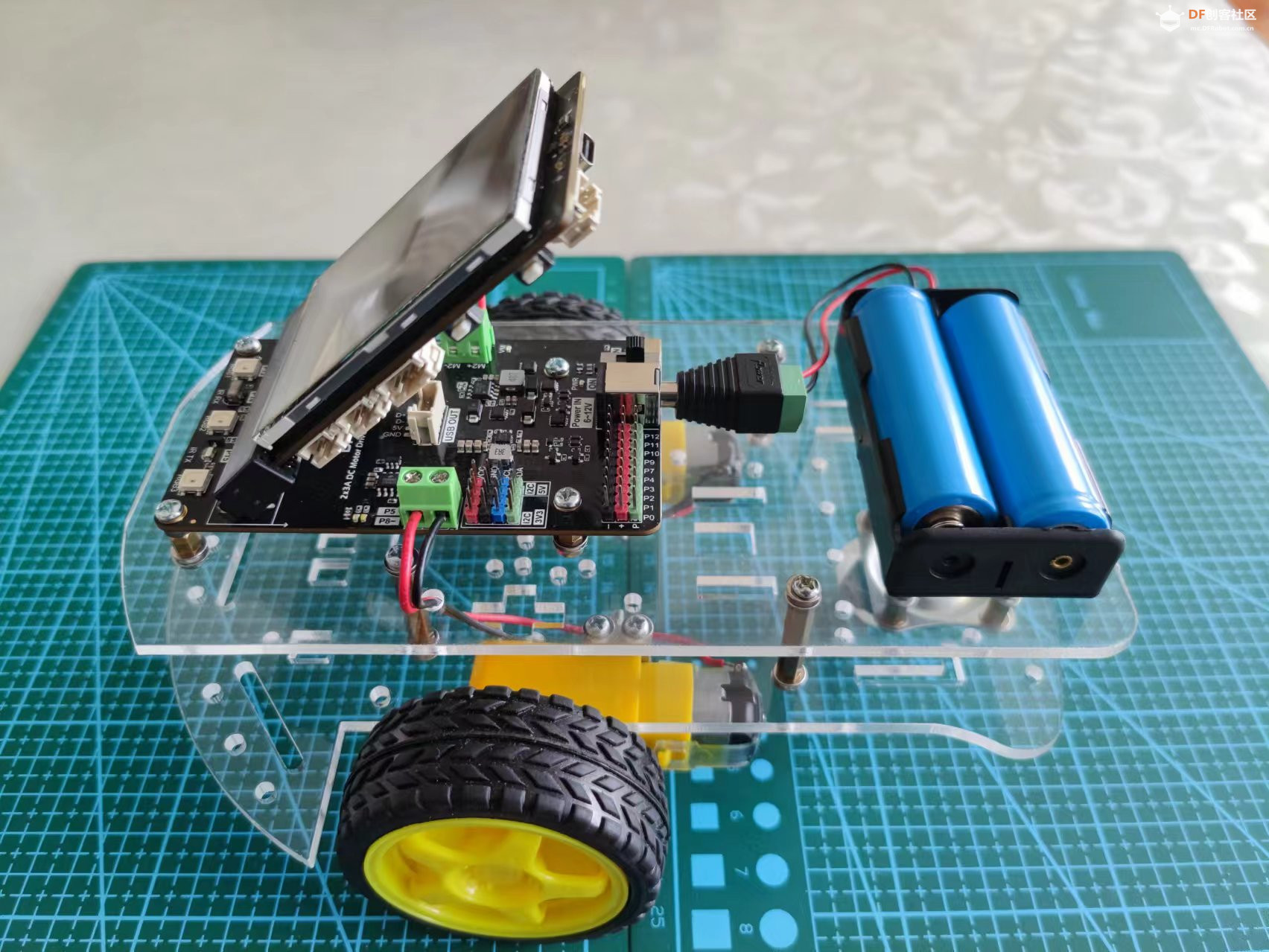 四、控制程序编写 控制程序分为掌控板端和行空板端,均使用Mind+图形化界面编程。掌控板和行空板之间通过UDP方式连接。利用掌控板向前、向后、向左、向右倾斜时发送相应代码,行空板端根据接收到的代码执行相应的动作。 (一)掌控板端程序截图  (二)行空板端程序截图 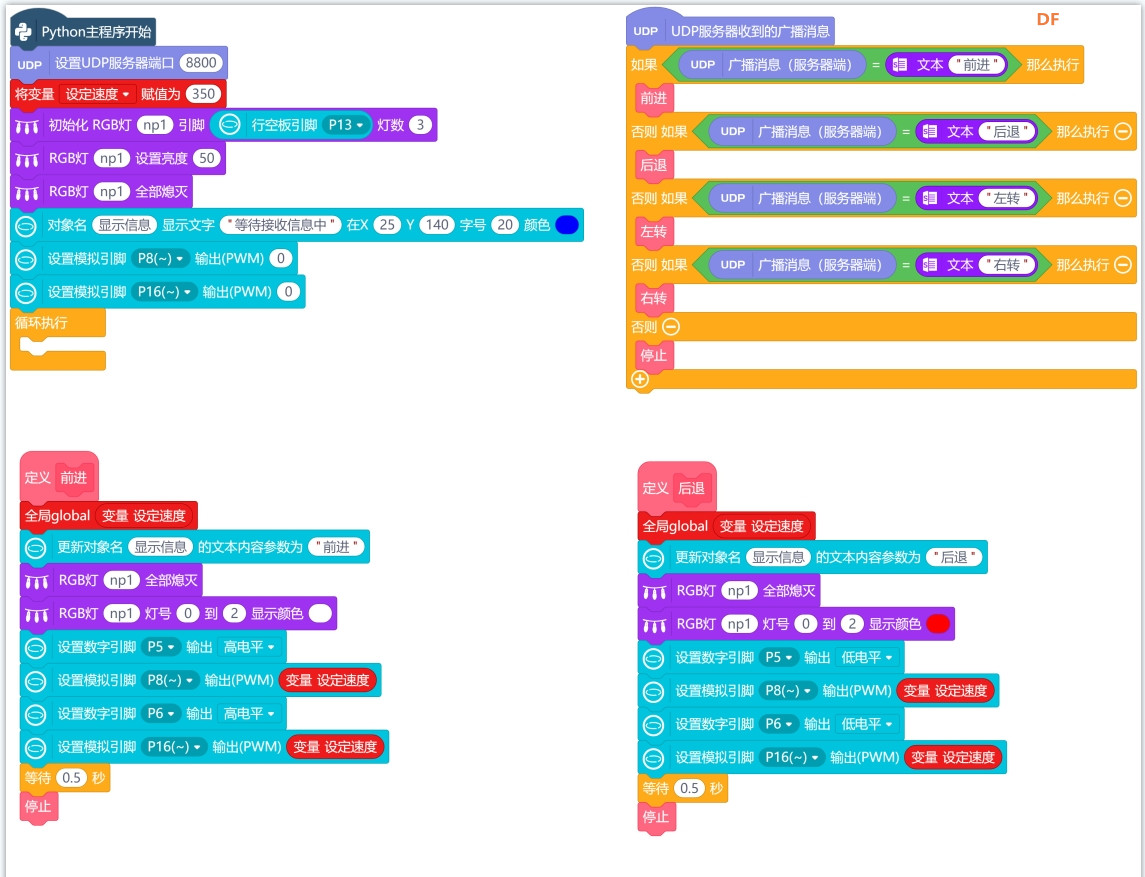  五、演示视频 六、制作反思 本次制作过程较为简单,主要的时间花在小车底盘亚克力板的制作。同时,小车的控制方式较为简单,只能实现前进、后退、左转、右转等功能,还需要后续继续研究。 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed


 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶






