|
2927| 3
|
[讨论] 【Beetle 树莓派RP2350】支持DFROBOT与Grove接口兼容扩展板 |

|
本帖最后由 i-FOX 于 2025-5-6 12:27 编辑 一、设计初衷 Beetle RP2350的尺寸很小,导致可引出的引脚也比较少,在预留了一个串口、IIC、SPI后,只有4个IO可用,其中2个支持模拟,两个是串口2的。 一般默认的开发都是使用串口1,所以,把另一个串口用于GPIO的功能 。 其他引脚在芯片上无法引出。所以,单纯的引出这些引脚意义用处不大,还要增加很多扩展的功能才行,但这些扩展DFROBOT的很多模块都是支持的,为了不“重复造轮子”,这里直接把2.54的排针转换成DFROBOT模块的标准接口。 由于DFROBOT的SPI没有标准的接口定义,这里就先按自己的一个定义来设计 ,除了SPI的主要数据线外,增加2个引脚,用于复位或是中断功能。 如果IO不够用,可以使用Gravity:CH423 I2C模块,或是Gravity: MCP23017 I2C 16位数字IO扩展模块。 如果IIC不够用,可以使用Gravity: I2C分线模块 现在市面上的这种小模块,除了DFROBOT还有很多是Grove接口标准的,为了兼容,添加了两种接口定义。 原理图: 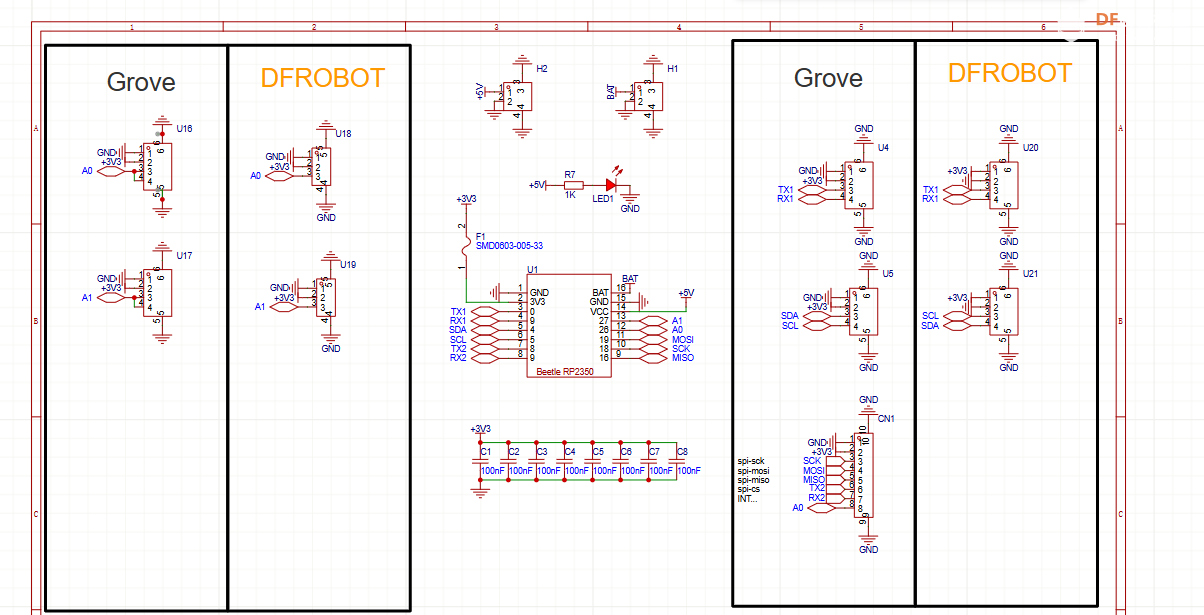 接口说明: 为防止两种接口的错误接插,在引出扩展板的电源处,增加保险。 DFROBOT的模块供电电压大多都是3.3~5V,而RP2350的IO电平是以3.3V为基准的,所以,接口上的电源采用3.3V 这里需要特别注意一下,DFROBOT也有两种接口,这两种接口的电源+-正好是反的,使用时需要注意。 Tricks for changing sensor cable pin mapping - DFRobot 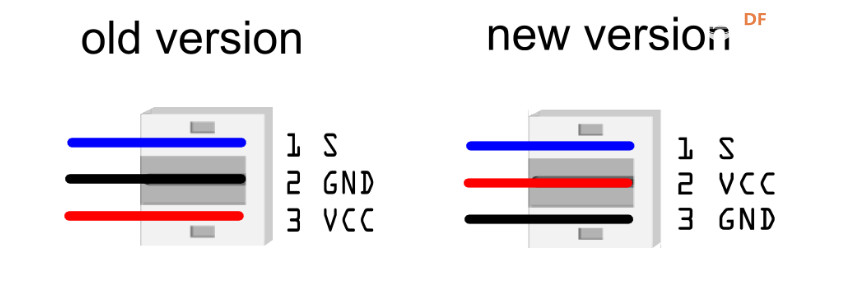 为方便可穿戴应用,扩展板底面预留了电池的连接口,使用ph2.0-2p连接线连接,注意电池的正负。 为避免使用的外设过多,功率不够,另外增加了5V电源的输入接口。 这个扩展板,在焊接上Beetle RP2350时,可以当一个扩展板,但当不焊接 Beetle RP2350时,可以当一个DFROBOT接口与Grove接口的桥接转换板。这样可以使用更多 的模块进行开发DIY了。 焊接时,为了方便拆下开发板,在开发板底下放了四个小电阻,可以把板子架高一点点,焊开发板时,锡放多一些;拆的时候,与低板有一定提空间,方便把锡吸走,用烙铁就可以了,否则,还要上焊台。 如下,是焊接好后的扩展板。 正面,DFROBOT标准接口,两个IO,一个IIC,一个UART。 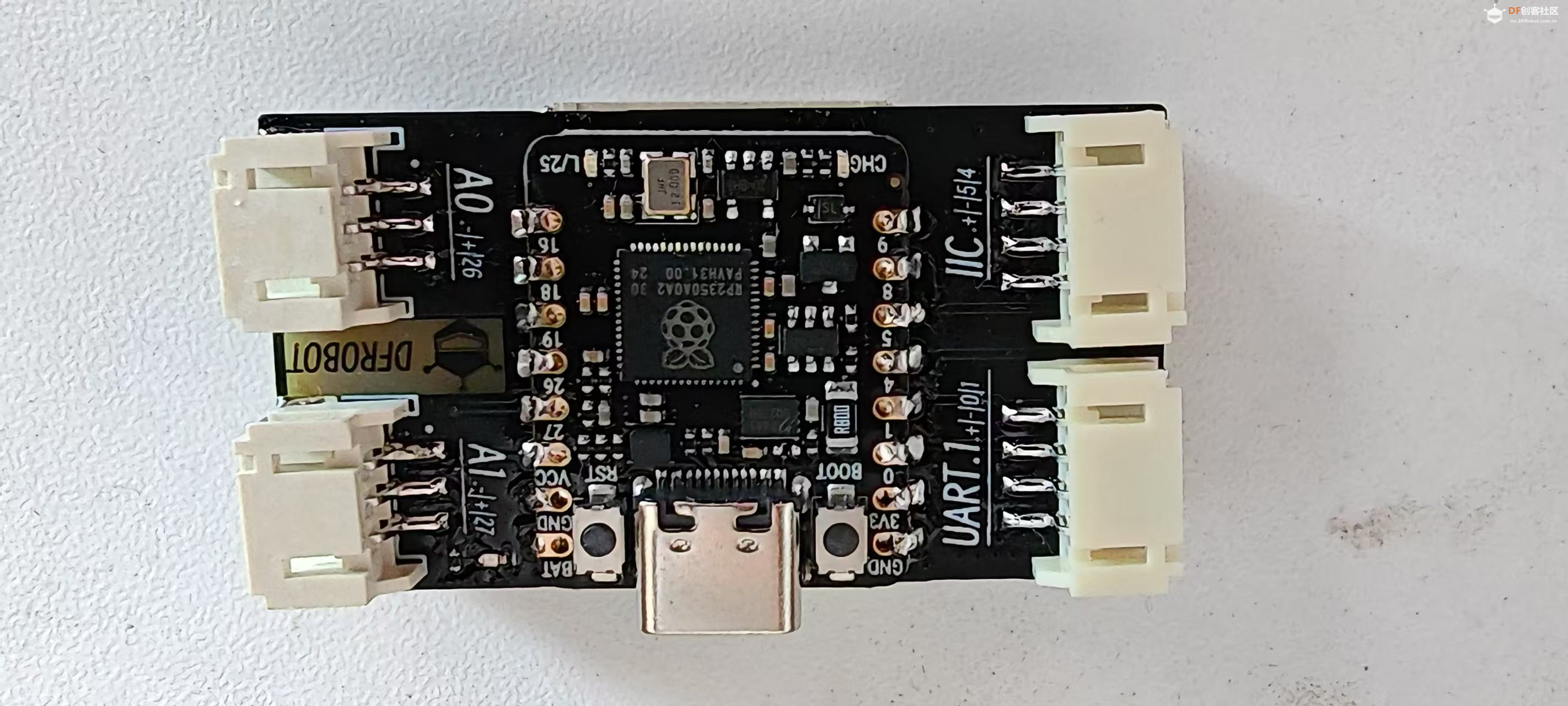 背面,Grove标准接口,多了一个SPI的接口,一个IO与A0复用。 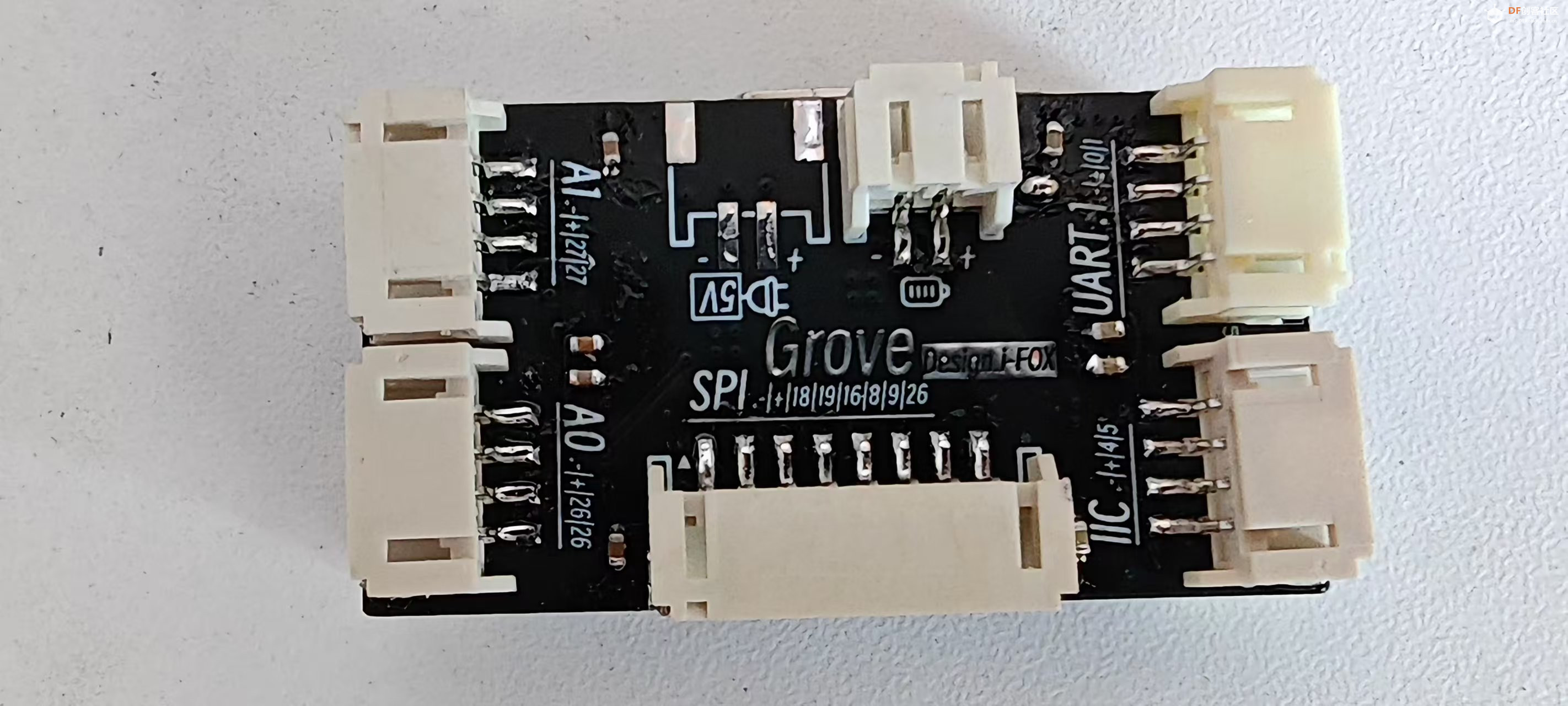 二、外设测试 1、RGB灯  2、IIC数码管  3、IO-LED  三、测试代码 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶








