|
123823| 41
|
[项目] 开架式水下机器人硬件搭建过程(附开源文件) |

|
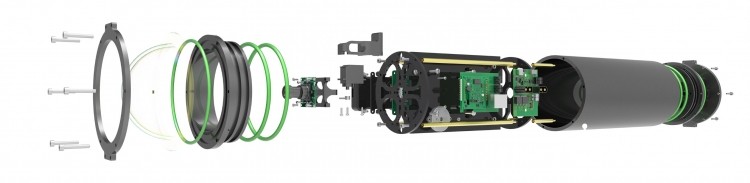
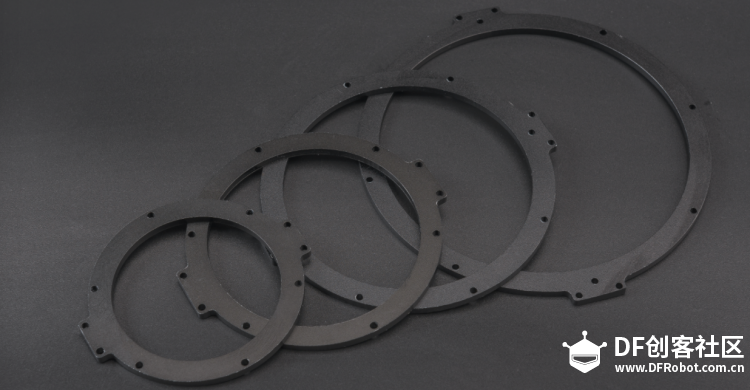
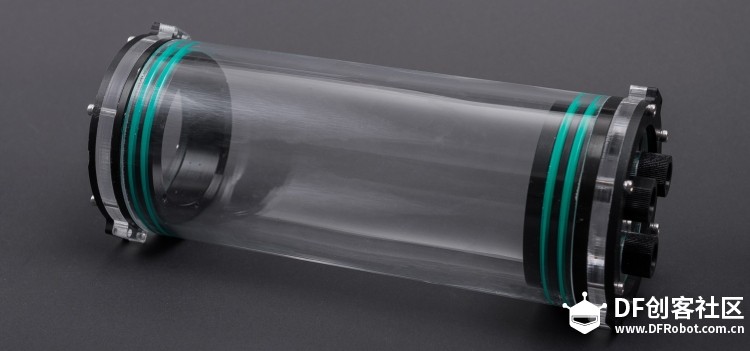
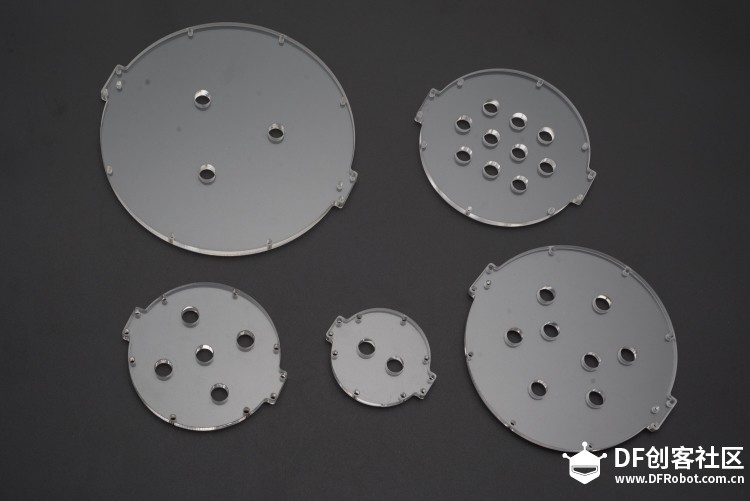
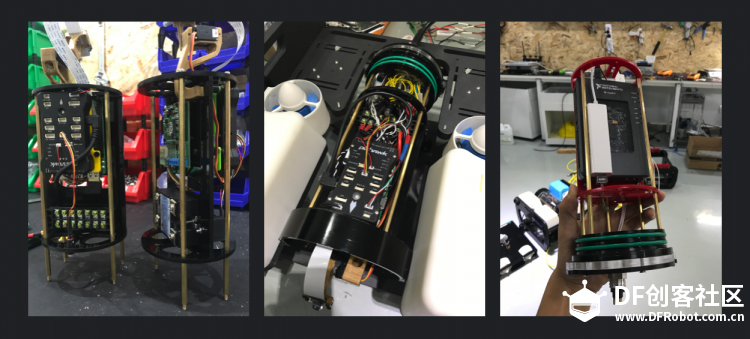
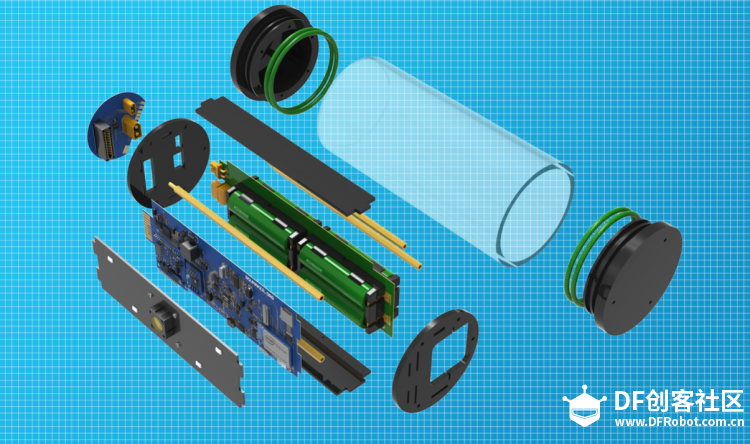
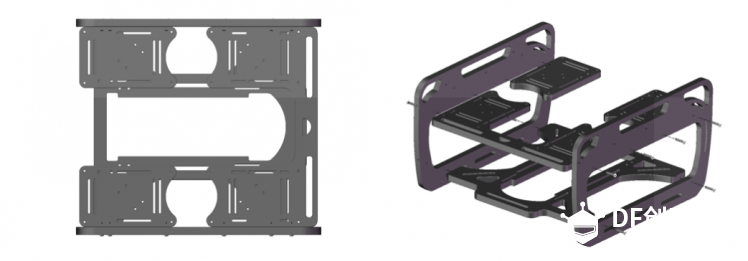
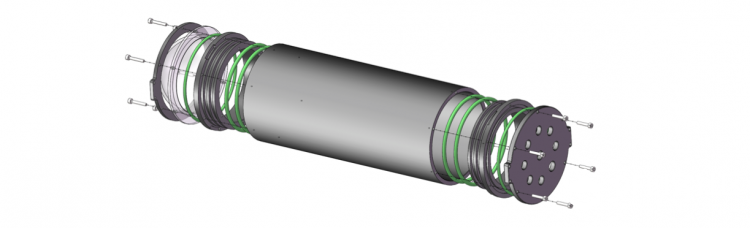
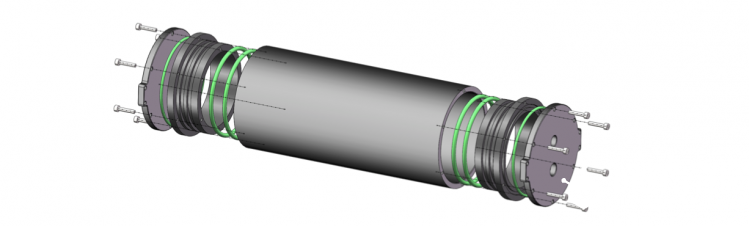
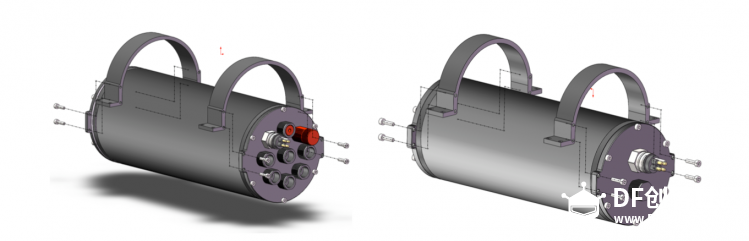
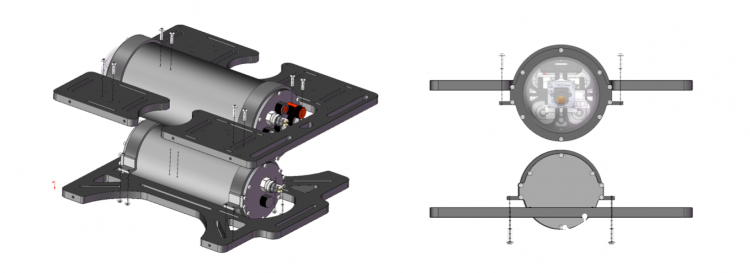
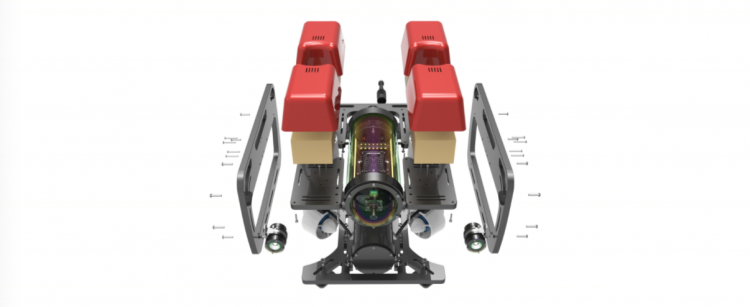
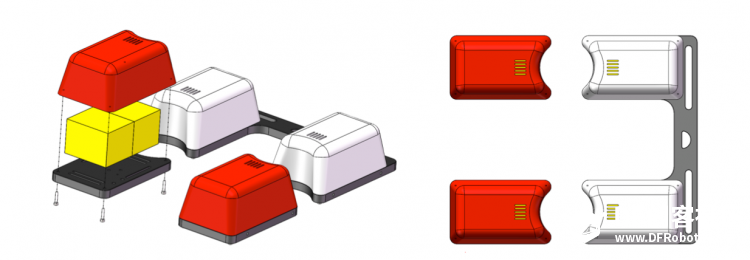
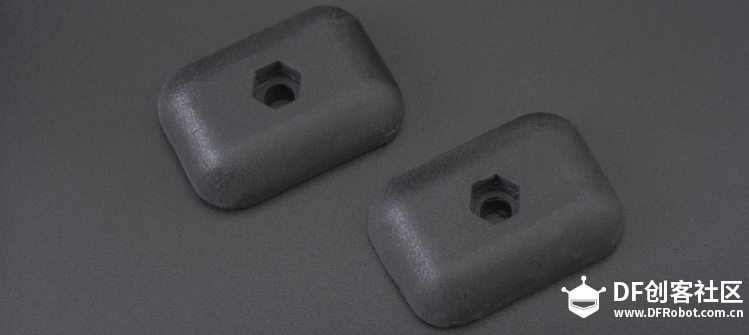
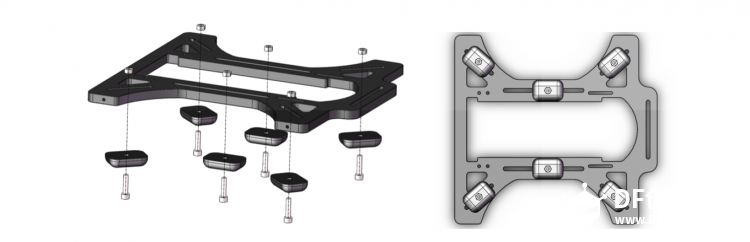
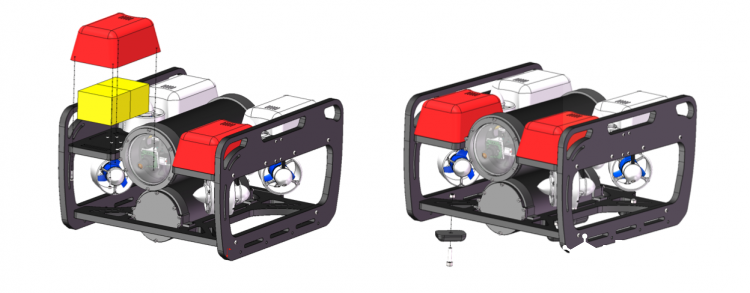
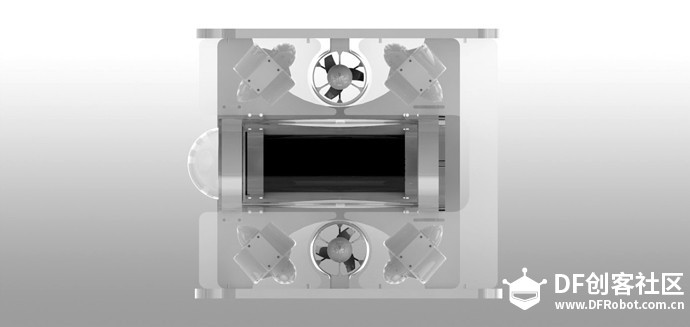
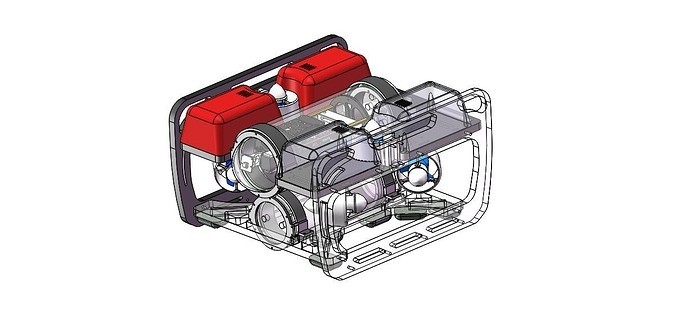
哈喽,来自ROVMAKER的周小康新人报道~ 本帖更新最近阶段做的其中一台,是一个开源的典型开架式水下机器人,后面会新帖发一些水下机器人的相关搭建和设计方法。 先简单介绍一下ROVMAKER,我们是一个水下机器人团队,研发和生产水下机器人相关零部件,提供水下机器人和相关产品的解决方案。 我们搭建了一个聚集专业海洋工程师和水下机器人爱好者的线上社区论坛,因为在dfrobot论坛发帖,这里就不放链接了~    渲染效果图:  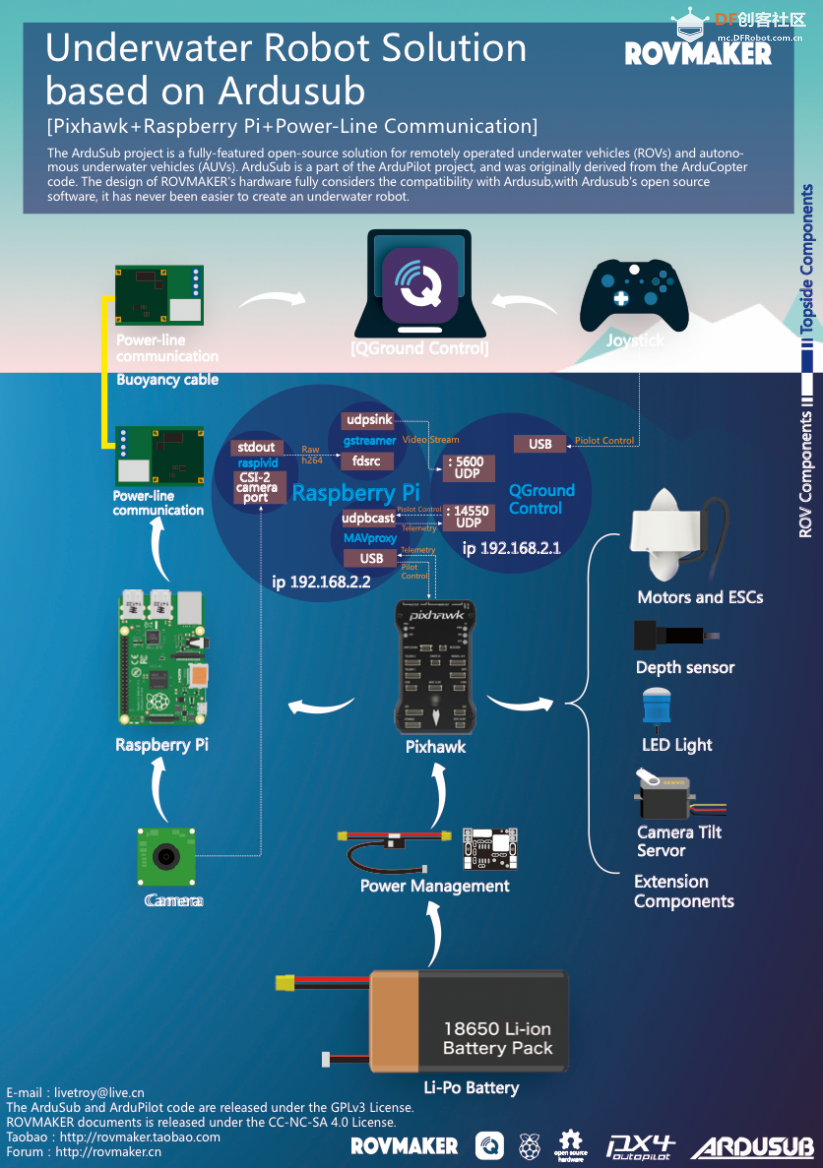 双手献上开源资料(这台机器取名为EDGE): EDGE的三维图: 上传于grabcad,包含sldprt,stl,step,igs文件,访问grabcad搜索rovmaker可查询下载到,或点击下面的链接: https://grabcad.com/library/rovmaker-edge-open-source-underwater-robot-1 在hackaday的项目页面: 在hackaday页网站的项目页面,在hackaday搜索rovmaker或点击下面的链接: https://hackaday.io/project/27781-rovmaker-edge-open-source-underwater-robot 开源手册: https://pan.baidu.com/s/1c2FBMVI PART1: Design and produce thruster first 本项目是从所有零部件开始从零设计一台ROV,首先要设计水下推进器。 众所周知,航模无刷电机都可以在水中直接用(漆包线焊接部分涂胶防水)。但是一旦接触海水或浸泡一段时间,会产生严重的损坏,硅钢片,磁铁,轴承都会生锈腐蚀。所以首创设计了一种特殊的包覆工艺,把定子完全包裹为一体保护线圈和硅钢片,磁铁表面也有特殊处理,轴承当然要选盐雾试验达标的进口轴承。另外,水下设备出水需要净水冲洗是一个常规步骤。  由此以来,电机所有部分都防水防腐蚀,以一种开放的形式浸泡在水中运转(一般为机械密封或磁耦合等密封),我们称之为开放式防水。然后设计桨叶和整流罩,把电调灌封在安装座底部,实现有效的水冷效果加成。 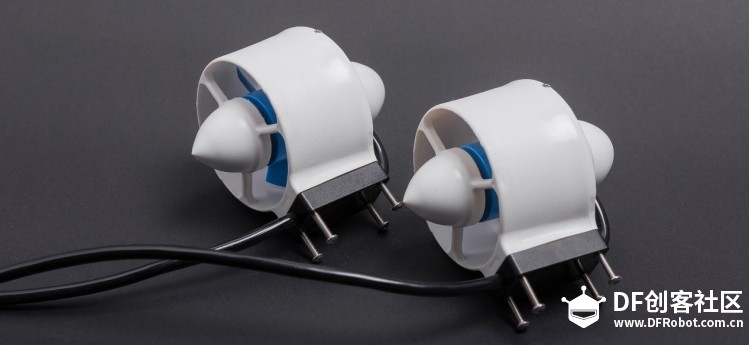 参数:2kg推力,350kv,30a 电调,12N/12P,5600rpm,3s-6s,10a max  上图是搭的一个 NI PXI 推进器测试平台,所使用的电调:  渲染图: 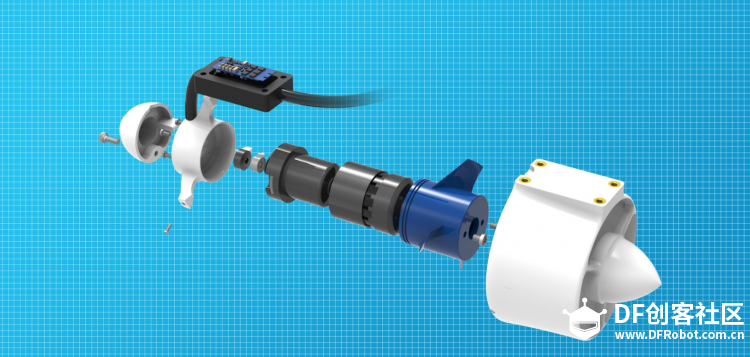 |
周小康 发表于 2018-3-2 16:19 求源代码,1440531462@qq.com |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶