|
5049| 0
|
[2019参赛作品] 【脑洞大赛】基于NB-IoT的智慧路灯监控系统(硬件开发) |

|
本节将进行嵌入式硬件编程开发,通过电能检测模块实现实时采集路灯节点电压、电流、功率、总耗电量、功率因子、路灯开关状态、耗能产生二氧化碳、光照度、路灯亮度、环境光照度、GPS位置11种传感数据,通过NB-IoT模组实现对华为云物联网平台数据上传及下发获取,达到联动控制效果。 1、开发软件 嵌入式硬件开发使用STM32CubeMX和Keil5实现,STM32CubeMX搭建NUCLEO-L432KC开发板GPIO底层配置,Keil5实现NUCLEO-L432KC开发板编程开发。 STM32CubeMX 是 ST 意法半导体近几年来大力推荐的STM32 芯片图形化配置工具,也是配置和初始化 C 代码生成器(STM32 configuration and initialization C code generation),也就是自动生成开发初期关于芯片相关的一些初始化代码。STM32CubeMX 包含了 STM32 所有系列的芯片,包含示例和样本(Examples and demos)、中间组件(Middleware Components)、硬件抽象层(Hardwaree abstraction layer)。  STM32CubeMX简介、下载及安装参见:https://blog.csdn.net/m0_38106923/article/details/89458297 Keil C51是美国Keil Software公司出品的51系列兼容单片机C语言软件开发系统,与汇编相比,C语言在功能上、结构性、可读性、可维护性上有明显的优势,因而易学易用。Keil提供了包括C编译器、宏汇编、链接器、库管理和一个功能强大的仿真调试器等在内的完整开发方案,通过一个集成开发环境(μVision)将这些部分组合在一起。运行Keil软件需要WIN98、NT、WIN2000、WINXP等操作系统。如果你使用C语言编程,那么Keil几乎就是你的不二之选,即使不使用C语言而仅用汇编语言编程,其方便易用的集成环境、强大的软件仿真调试工具也会令你事半功倍。 Keil5简介、下载、安装及破解参见:https://blog.csdn.net/m0_38106923/article/details/89492257 2、STM32CubeMX底层环境搭建 使用STM32CubeMX搭建NUCLEO-L432KC开发板GPIO底层配置,主要配置微控制器晶振、定时器、PWM接口、UART1、UART2、ADC接口和LED状态指示灯接口,具体实现如下: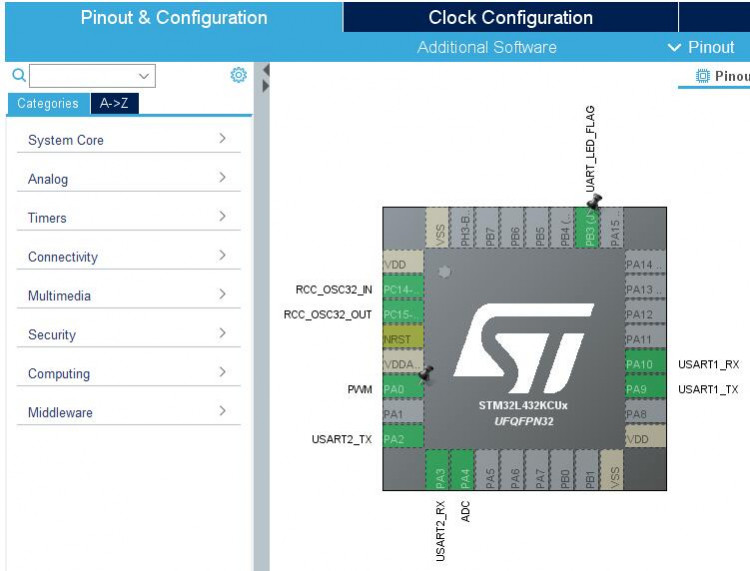 在Keil5开发环境中需要编写硬件基础底层配置功能、电能电耗检测功能、GPS定位功能、环境光照检测功能、NB-IoT模组通信功能和云端交互功能。 NB-IoT模组配置实现代码如下: [mw_shl_code=c,true]void BC20_LWM2M_Init() { HAL_UART_Transmit(&huart2,(uint8_t *)"AT+QGNSSC=1\r\n",13,0xff); HAL_Delay(1000); HAL_UART_Transmit(&huart2,(uint8_t *)"AT+QGNSSAGPS=1\r\n",16,0xff); HAL_Delay(1000); HAL_UART_Transmit(&huart2,(uint8_t *)"AT+QLWSERV=\"49.4.85.232\",5683\r\n",31,0xff); HAL_Delay(1000); HAL_UART_Transmit(&huart2,(uint8_t *)"AT+QLWCONF=\"862*************\"\r\n",30,0xff); HAL_Delay(1000); HAL_UART_Transmit(&huart2,(uint8_t *)"AT+QLWADDOBJ=19,0,1,\"0\"\r\n",25,0xff); HAL_Delay(1000); HAL_UART_Transmit(&huart2,(uint8_t *)"AT+QLWOPEN=0\r\n",14,0xff); HAL_Delay(1000); HAL_UART_Transmit(&huart2,(uint8_t *)"AT+QLWCFG=\"dataformat\",1,1\r\n",28,0xff); HAL_Delay(1000); memset(usart2_rec_buffer,0,usart2_rcv_len); usart2_rcv_len = 0; }[/mw_shl_code] 电能电耗监测功能实现代码如下: [mw_shl_code=c,true]void get_electric_energy() { int num=0; HAL_Delay(1000); char buf[8]={0x01,0x03,0x00,0x48,0x00,0x0A,0x45,0xDB}; HAL_UART_Transmit(&huart1,(uint8_t *)buf,8,0xff); HAL_Delay(2000); num=usart1_rec_buffer[3]*256+usart1_rec_buffer[4]; Sensor.Voltage[0]=num/10000+'0'; Sensor.Voltage[1]=num/1000%10+'0'; Sensor.Voltage[2]=num/100%10+'0'; Sensor.Voltage[3]='.'; Sensor.Voltage[4]=num/10%10+'0'; Sensor.Voltage[5]=num%10+'0'; num=0; num=usart1_rec_buffer[5]*256+usart1_rec_buffer[6]; Sensor.Electric_current[0]=num/100+'0'; Sensor.Electric_current[1]='.'; Sensor.Electric_current[2]=num/10%10+'0'; Sensor.Electric_current[3]=num%10+'0'; num=0; num=usart1_rec_buffer[7]*256+usart1_rec_buffer[8]; Sensor.Power[0]=num/10+'0'; Sensor.Power[1]=num%10+'0'; num=0; num=usart1_rec_buffer[9]*256*256*256+usart1_rec_buffer[10]*256*256+usart1_rec_buffer[11]*256+usart1_rec_buffer[12]; Sensor.Power_consumption[0]=num/100+'0'; Sensor.Power_consumption[1]='.'; Sensor.Power_consumption[2]=num/10%10+'0'; Sensor.Power_consumption[3]=num%10+'0'; num=0; num=usart1_rec_buffer[13]*256+usart1_rec_buffer[14]; Sensor.Power_factor[0]='0'; Sensor.Power_factor[1]='.'; Sensor.Power_factor[2]=num/100+'0'; Sensor.Power_factor[3]=num/10%10+'0'; Sensor.Power_factor[4]=num%10+'0'; num=0; Sensor.LED_flag[0]=usart1_rec_buffer[16]+'0'; num=usart1_rec_buffer[17]*256*256*256+usart1_rec_buffer[18]*256*256+usart1_rec_buffer[19]*256+usart1_rec_buffer[20]; Sensor.Carbon_dioxide[0]=num/1000+'0'; Sensor.Carbon_dioxide[1]='.'; Sensor.Carbon_dioxide[2]=num/100%10+'0'; Sensor.Carbon_dioxide[3]=num/10%10+'0'; Sensor.Carbon_dioxide[4]=num%10+'0'; num=0; num=usart1_rec_buffer[21]*256+usart1_rec_buffer[22]; Sensor.Frequency[0]=num/1000+'0'; Sensor.Frequency[1]=num/100%10+'0'; Sensor.Frequency[2]='.'; Sensor.Frequency[3]=num/10%10+'0'; Sensor.Frequency[4]=num%10+'0'; num=0; memset(usart1_rec_buffer,0,usart1_rcv_len); usart1_rcv_len = 0; }[/mw_shl_code] GPS定位功能实现代码如下: [mw_shl_code=c,true]void get_gps() { HAL_Delay(1000); HAL_UART_Transmit(&huart2,(uint8_t *)"AT+QGNSSRD=\"NMEA/RMC\"\r\n",23,0xff); HAL_Delay(2000); if((usart2_rec_buffer[2]=='+')&&(usart2_rec_buffer[3]=='Q')&&(usart2_rec_buffer[4]=='G')) { Sensor.Latitude[0]=usart2_rec_buffer[31]; Sensor.Latitude[1]=usart2_rec_buffer[32]; Sensor.Latitude[2]='.'; Sensor.Latitude[3]=usart2_rec_buffer[33]; Sensor.Latitude[4]=usart2_rec_buffer[34]; Sensor.Latitude[5]=usart2_rec_buffer[36]; Sensor.Latitude[6]=usart2_rec_buffer[37]; Sensor.Latitude[7]=usart2_rec_buffer[38]; Sensor.Latitude[8]=usart2_rec_buffer[39]; Sensor.Longitude[0]=usart2_rec_buffer[43]; Sensor.Longitude[1]=usart2_rec_buffer[44]; Sensor.Longitude[2]=usart2_rec_buffer[45]; Sensor.Longitude[3]='.'; Sensor.Longitude[4]=usart2_rec_buffer[46]; Sensor.Longitude[5]=usart2_rec_buffer[47]; Sensor.Longitude[6]=usart2_rec_buffer[49]; Sensor.Longitude[7]=usart2_rec_buffer[50]; Sensor.Longitude[8]=usart2_rec_buffer[51]; Sensor.Longitude[9]=usart2_rec_buffer[52]; } memset(usart2_rec_buffer,0,usart2_rcv_len); usart2_rcv_len = 0; }[/mw_shl_code] [mw_shl_code=c,true]void get_illumination() { int ADC_value=0,num=0; float voltage=0; HAL_Delay(1000); HAL_ADC_Start(&hadc1); HAL_ADC_PollForConversion(&hadc1,100); ADC_value = HAL_ADC_GetValue(&hadc1); voltage = (float)(ADC_value *3.3/4096); voltage*=100; num=100-(int)(voltage*100/329); Sensor.Illumination[0]=num/100+'0'; Sensor.Illumination[1]=num/10%10+'0'; Sensor.Illumination[2]=num%10+'0'; ´ num=100-num; Sensor.LED_brightness[0]=num/100+'0'; Sensor.LED_brightness[1]=num/10%10+'0'; Sensor.LED_brightness[2]=num%10+'0'; LED_brightness_flag=num*21; }[/mw_shl_code] [mw_shl_code=c,true]void BC20_LWM2M_Send() { char send_buf[100],bufout[100]; char *bufin=(char*)&Sensor; for (int i = 0; i < strlen(bufin); i++) { sprintf(bufout+i*2, "%02X",bufin); HAL_Delay(20); } sprintf((char *)send_buf, "AT+QLWDATASEND=19,0,0,%d,%s,0x0100\r\n",strlen(bufin),bufout); HAL_UART_Transmit(&huart2,(uint8_t *)send_buf,strlen((const char*)send_buf),0xff); //·¢ËÍÊý¾Ý memset(bufin,0,strlen(bufin)); memset(bufout,0,strlen(bufout)); memset(send_buf,0,strlen(send_buf)); memset(usart2_rec_buffer,0,usart2_rcv_len); usart2_rcv_len = 0; }[/mw_shl_code] [mw_shl_code=c,true]int num=0; char flag=0; void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim) { char led_off[8]={0x01,0x05,0x00,0x00,0x00,0x00,0xCD,0xCA}; char led_on[8]={0x01,0x05,0x00,0x00,0xFF,0x00,0x8C,0x3A}; if(htim->Instance == TIM1) { if(num%500==0) { if(usart1_rcv_len>=1) { HAL_GPIO_TogglePin(GPIOB,GPIO_PIN_3); } if(usart2_rcv_len>=1) { if((usart2_rec_buffer[2]=='+')&&(usart2_rec_buffer[3]=='Q')&&(usart2_rec_buffer[4]=='L')) { if(usart2_rec_buffer[26]=='A') { flag=0; if(usart2_rec_buffer[27]=='1') { HAL_UART_Transmit(&huart1,(uint8_t *)led_on,8,0xff); } else if(usart2_rec_buffer[27]=='0') { HAL_UART_Transmit(&huart1,(uint8_t *)led_off,8,0xff); } } else if(usart2_rec_buffer[26]=='B') { if(usart2_rec_buffer[27]=='1') { flag=1; } else if(usart2_rec_buffer[27]=='0') { flag=0; } } memset(usart2_rec_buffer,0,usart2_rcv_len); usart2_rcv_len = 0; } HAL_GPIO_TogglePin(GPIOB,GPIO_PIN_3); } if(flag==1) { __HAL_TIM_SET_COMPARE(&htim2, TIM_CHANNEL_1, LED_brightness_flag); } num=0; } num++; } }[/mw_shl_code] 【脑洞大赛】基于NB-IoT的智慧路灯监控系统(云端部署及训练):https://mc.dfrobot.com.cn/thread-296711-1-1.html  |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2025 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 老版主限定
老版主限定
 创作达人
创作达人
 ARD DAY
ARD DAY
 创客造
创客造
 摸鱼团员
摸鱼团员
 编辑选择奖
编辑选择奖






