|
15399| 7
|
3D打印之进击四足(联机版)——修改篇 |
|
本帖最后由 eyanlong 于 2015-6-18 19:06 编辑 在qq群里看到陈老师发的四足蜘蛛的图片和链接,马上提起了兴趣。到df的论坛上下载了3d模型,并根据网页上给出的电子配件,去df商城购买。满怀欣喜,打印出3d模型来,等待着电子配件到来。周五下单,周二还没有动静,找客服咨询。客服说了没法的理由,并且给补发了顺丰,还可以接受。在焦急的等待中,周四收到,开始将舵机放到3D打印出来的模型里去,舵机放不进去,只好掰开。   买了8个舵机,在安装过程中,由于尺寸卡不上,就用刻刀削。不小心一块屑片,溅到了眼睛里,当时就难受的眼睛不敢转动。赶到药店买了瓶眼药水,点上多次,才把屑片冲出来。下午回到学校,开始联机检测舵机。舵机控制板需要外接电源,买的电池,舵机控制板上没有地方插,需要自己重新接线。 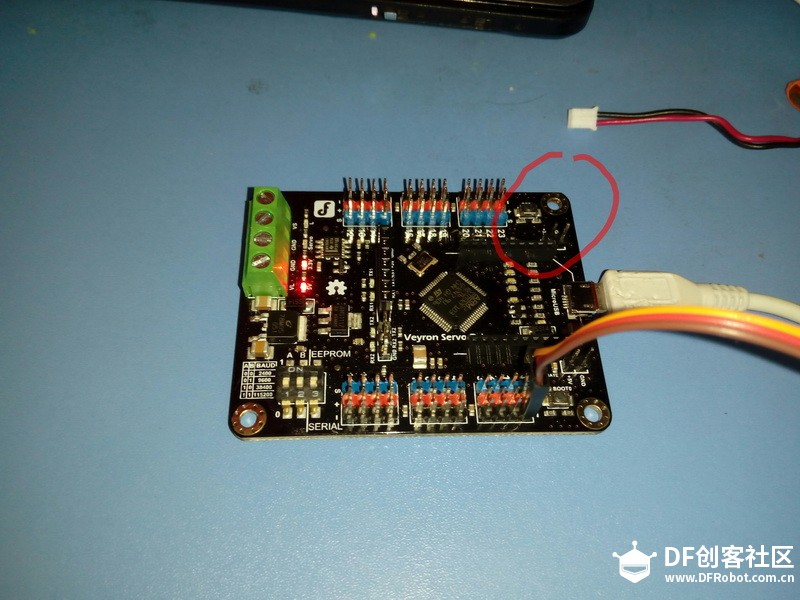 舵机控制板的驱动程序安装麻烦。经过技术支持和陈老师的指点,终于把驱动安装上去了。然后检测舵机,发现其中一个舵机是坏的。跟客服反映后,要求将舵机发快递回去,检测是否质量问题才予以更换。来回的快递费,都能再买一个了,虽然df卖的有点贵。 在原来的3d图形上进行修改, 改了尺寸后,打印出来发现还是不行。正好,在微小网上发现了四足蜘蛛机器人的图纸。没有仔细观察,就又打印出来了,打印出来安装的时候,发现原来这图纸是给大的舵机用的,不是9克舵机。然后,将图纸导入到sketchup进行修改。完成后再次打印,打印出连接起来,发现腿太长,这样显得整体太晃,还没走就已经爬地上了。 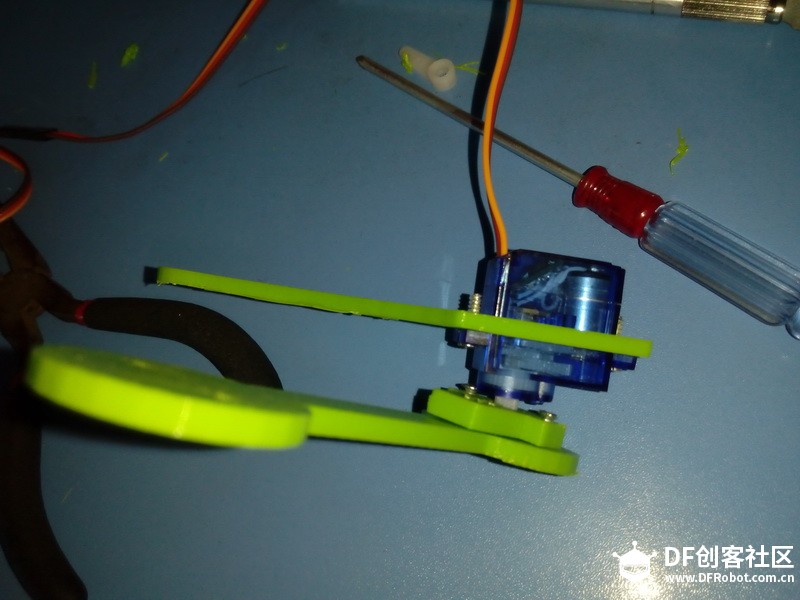 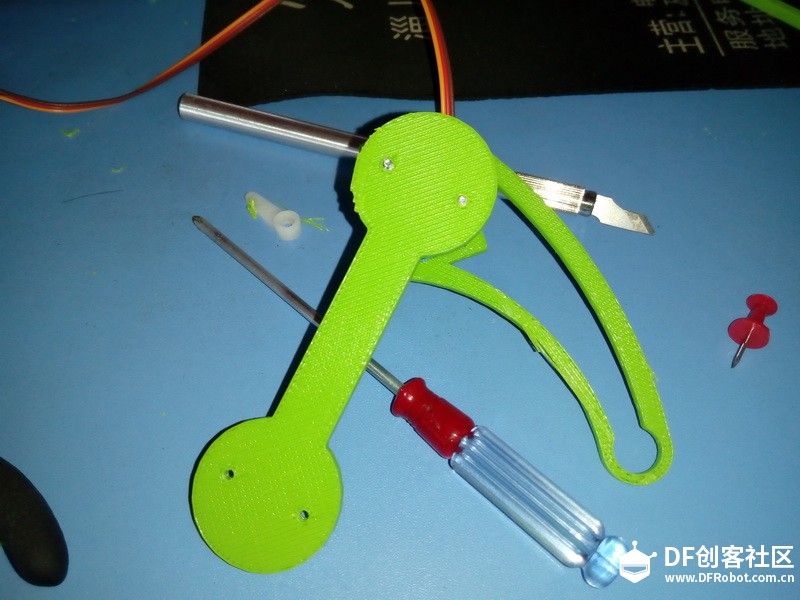 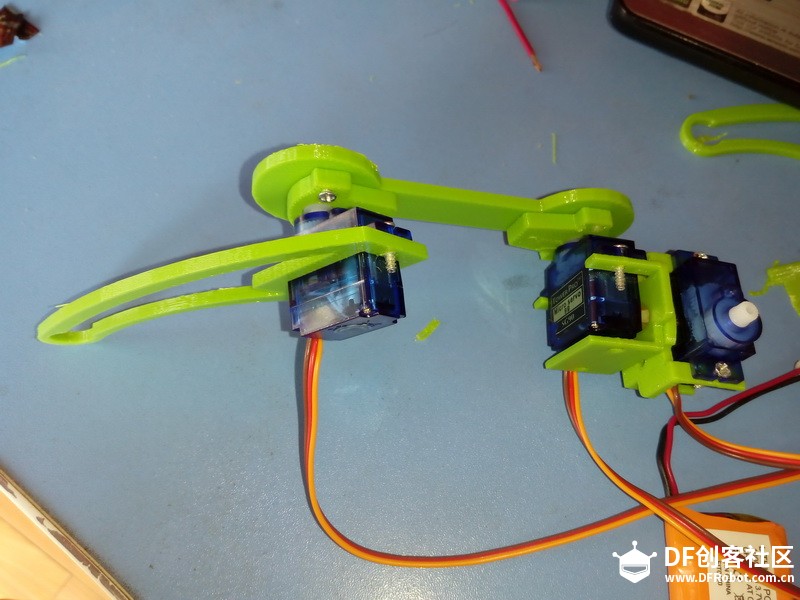 在淘宝上搜索了看到一个结构比较好的模型,然后在sketchup里将这个模型修改成看到的结构。相比之下,这样的腿结实多了。 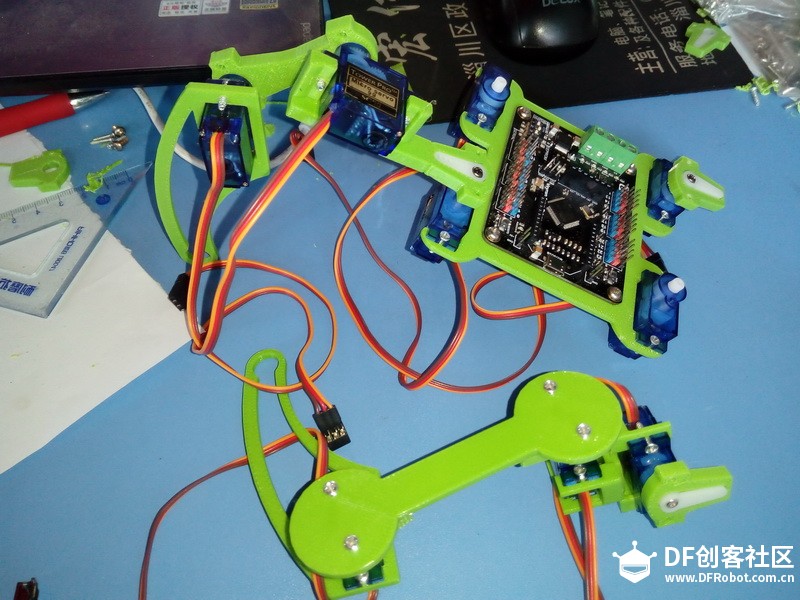 这样控制板也量好尺寸,安装上去。整体的样子出来了。 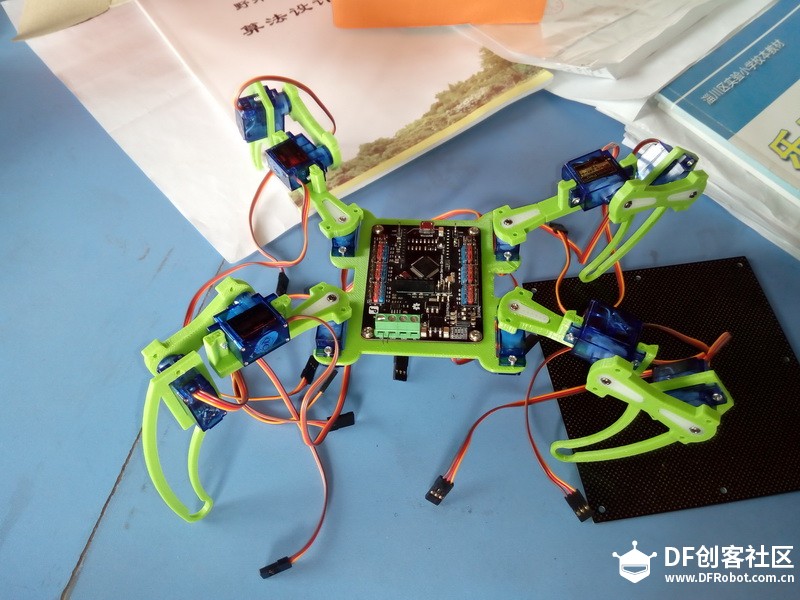 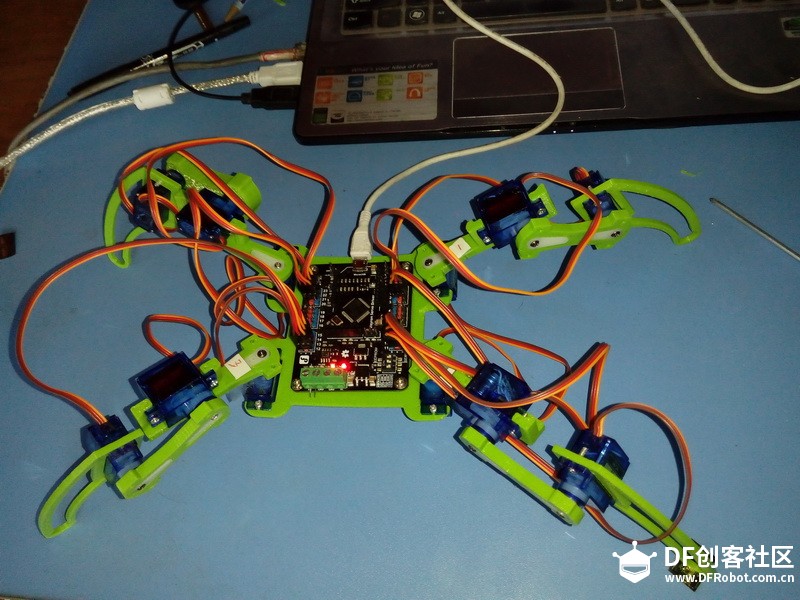 这时,又出现了新的问题。电池在调试的过程中,没有电了,接上充电模块后,由于对充电模块了解过少,忘了打开充电模式,充了一天,使用时还是没有电。继续跟df技术支持咨询,经过他的提示,可能是锂电池用电过度,需要大电流刺激一下,根据提示用导线接到了,笔记本充电口的正负极接上一点,电火花出来,再充电,指示灯变红了,可以了。  充好电,接到控制板上,还是不亮,只是瞬间有电流,舵机不断的抖动。我以为电池还是没有充上电,咨询了陈老师,可能是接口接触不好,这样我就把端口割掉,直接用导线到接线柱上。 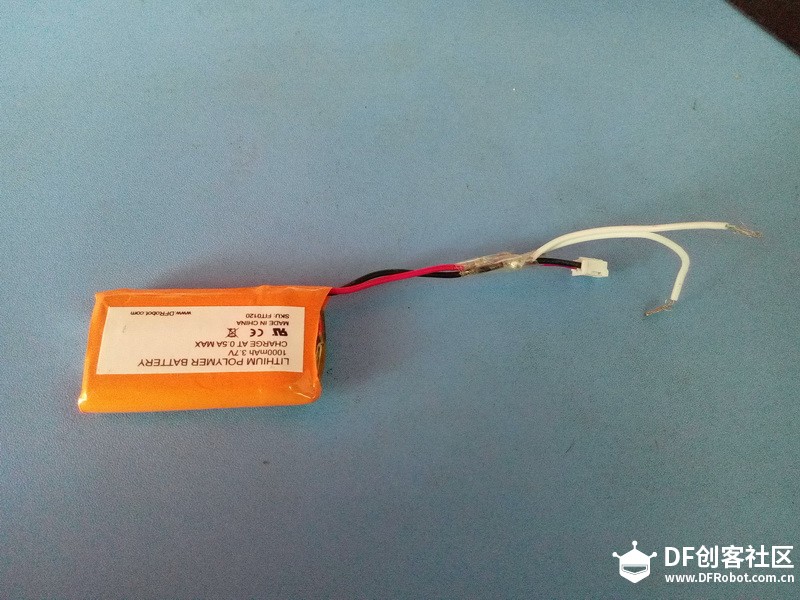 还是出现原来的问题,找不出原因。手头也没有万用表,就网购了一块。实在等不起,就去了学校总务处,借了一块。量了电池电压是正常的4.2v,说明问题出在了控制板上。把控制板上所有的舵机连线把下。再接发现电源指示灯亮了,心情立马就多云转晴,开始进行蜘蛛动作的调整。 可惜电量太少,只用了不到40分钟,在使用过程中如果动作过大,还是会出现电池不供电的情况,说明在控制板接线柱那里是有问题的。 作为一名小学教师,在学校里有教学任务,还有各种各样的杂事,确实是没有时间进行实验和研究。而且缺少各种工具,比如没有小的平口螺丝刀,用铁丝砸扁了,没有电烙铁、万用表都从各种地方借用,导线去凑。在我这次制作的过程中,任何一次问题出现,都有可能导致放弃。所以希望教程提供者或硬件提供商能多支持向我这样的教师,让我们在紧张的工作中也能体会到制作的乐趣,而不是各种各样的麻烦。这次制作的过程从5月22日持续到6月18日。 我把我制作的12舵机四足蜘蛛3D打印格式上传共享给大家,软件的使用和驱动的安装大家去看这个帖子。3D打印之进击四足(联机版)——详细教程篇(机械,电子) |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed


 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶







